Convertisseur USB-UART vers CP2102 classique. Si vous ne savez pas ce que c'est, alors vous n'en avez pas besoin. Je demande le reste sous chat.
Je dois dire tout de suite: cela fonctionne comme il se doit. Le convertisseur est fabriqué selon le schéma bien connu et bien établi de SiLabs avec un poids minimum. Une bonne option pour ceux qui sont trop paresseux pour souder seuls.

Notez que malgré toutes les capacités de la puce elle-même, les conclusions pour le contrôle matériel (DTR / DSR, RTS / CTS) ne sont pas divorcées. Seule la méthode logicielle (X-On / X-Off) reste pour le contrôle de flux. Divorcé:
TX / RX.
- Alimenté par USB (+ 5V) et masse.
- + 3,3V du convertisseur de tension intégré dans la puce. Le voltmètre indique 3,15 V. Je n'ai aucune idée du courant réel qui peut en être retiré, mais la fiche technique est de 500 mA.
- RST.

Entrées / sorties «tolérantes 5V», peuvent être alimentées jusqu'à 5,8V. Il a été testé à 115200 kbit / s et 57600 kbit / s avec deux contrôleurs. Il n'y a aucun problème.
À bord, une LED SMD rouge s'allume lorsque l'alimentation est appliquée. La soudure est chinoise et pas du tout la même que sur la photo. Au début, il me semblait même que la soudure était froide. La quantité d'étain et la police sur le masque sont telles qu'elles semblent être fabriquées dans une production absolument ancienne.
Le kit est livré avec un disque de pilote. Je viens de le jeter, sous Linux, l'appareil et donc il se lève comme / dev / ttyUSBx.

Oeuvres
+ petit (selon mes dimensions 42x15)
+ système éprouvé au fil des ans
+ pilotes pour toutes les plates-formes, et peuvent gagner sans eux du tout
Un dollar plus cher que le convertisseur susmentionné
- fils de connexion non inclus
L'adaptateur de port RS232 pour le bus série universel (USB vers UART Bridge) est un périphérique USB haute vitesse pour connecter des périphériques conformes à la norme TIA / EIA232.
L'adaptateur est basé sur le contrôleur Silicon Labs CP2102 et est destiné à être utilisé dans des systèmes équipés d'un bus USB. Les périphériques sont connectés à l'aide du connecteur DB9 standard.
- prise en charge des spécifications USB 2.0;
- un ensemble complet de signaux d'interface RS232;
- l'amplitude du signal RS232 n'est pas pire que ± 5,5 V;
- alimenté par un bus USB.
Installer et connecter l'adaptateur
- Avant d'installer et de connecter l'adaptateur CP2102, assurez-vous que les appareils externes sont hors tension et connectés à la boucle de terre.
- Ensuite, connectez le périphérique externe au connecteur DB9.
- Installez l'adaptateur dans un connecteur USB libre, en surveillant visuellement les patins d'atterrissage jusqu'à l'arrêt dans le connecteur.
- fournissant une tension au dispositif d'entrée-sortie, le système est prêt à fonctionner.
Lorsque vous commencez à installer l'adaptateur CP2102, vous devez tenir compte du fait que la spécification USB implique la possibilité d'une connexion "à chaud", mais son effet ne s'applique pas aux périphériques d'entrée-sortie série périphériques. Lorsque vous travaillez avec l'adaptateur, seuls les équipements périphériques déconnectés doivent être connectés! Le non-respect de ces règles peut entraîner la sortie des composants d'un système informatique!
Installation d'un pilote basé sur les systèmes d'exploitation Windows
Après avoir connecté l'adaptateur CP2102 au connecteur USB dans l'environnement des systèmes d'exploitation Windows 2K / XP, il est détecté comme suit:

Vous devez maintenant télécharger le pilote CP210x USB vers UART. Nous commençons son installation:

Dans le processus de pré-installation, l'utilisateur peut spécifier le répertoire dans lequel les pilotes de périphérique seront stockés CP210x:

Si le système d'exploitation demande des informations sur l'emplacement des pilotes de périphérique, l'utilisateur devra indiquer le chemin d'accès à ces derniers. Le modèle logiciel de l'adaptateur CP2102 se compose d'un périphérique composite et d'un pont USB vers UART, chacun étant décrit par ses propres inf-fichier.
Par conséquent, dans le processus de détection automatique, le système d'exploitation demande séquentiellement les deux fichiers.
Les pilotes d'adaptateur doivent être proposés au système pour l'installation à partir du répertoire spécifié lors de la préinstallation, sauf indication contraire de l'utilisateur. Initialement, le système d'exploitation installe les pilotes pour le périphérique composite USB:

Si la version actuelle des pilotes de périphérique USB composite n'est pas confirmée par un certificat numérique de Microsoft, l'utilisateur est averti à ce sujet par le message suivant:

Le chemin d'accès aux fichiers nécessaires pour le périphérique composite est sélectionné en fonction des conditions de pré-installation:

La prochaine étape d'installation est les pilotes de pont USB vers UART. Comme à l'étape précédente, une installation automatique est recommandée.

Si la version actuelle des pilotes USB vers UART Bridge Controller n'est pas confirmée par un certificat numérique Microsoft, l'utilisateur en est averti lors de la communication. Le chemin d'accès aux fichiers nécessaires est sélectionné en fonction des conditions de pré-installation:

Après l'installation, le contrôleur de bus série universel du périphérique composite CP210x USB apparaît dans les propriétés du système, et le port série COM3 est implémenté à l'aide du contrôleur de pont USB vers UART CP210x, et la liste des périphériques prend la forme suivante:

Ça y est, le pilote est installé!
Ce matériel est publié pour la première fois, aimablement fourni pour publication sur notre site Web par la société
IC Book Labs est la propriété exclusive de cette société. La réimpression sans autorisation écrite du détenteur des droits d'auteur est interdite.
Comme vous le savez, pour le diagnostic et la reprogrammation des systèmes automobiles, en particulier l'ECM, la ligne de diagnostic K-Line 12 V (ISO 9141) est utilisée, qui est électriquement compatible avec l'interface série RS232 utilisée dans les ordinateurs personnels. Mais, lors du couplage d'une voiture et d'un ordinateur, un problème se pose que l'échange avec les systèmes de voiture s'effectue à des débits en bauds de 200 et 10400, ce qui n'est pas typique pour les ordinateurs. Cet article présente une solution simple à ce problème pour les adaptateurs USB vers COM à l'aide des logiciels fournis par les développeurs.
Contrôle du taux de change
Le débit en bauds de l'interface série dépend du diviseur installé. La valeur du diviseur est déterminée par le contenu du registre du diviseur de débit en bauds. L'analyse de l'architecture du contrôleur et des calculs simples montrent qu'il n'y a aucun obstacle à l'utilisation des taux de bauds qui nous intéressent à 200 et 10400 bauds. Alors quel est le problème?
Lors de la rédaction de systèmes d'exploitation, de pilotes et de diverses applications de maintenance de l'interface série, afin de simplifier, nous avons utilisé la norme, devenue traditionnelle pour les ordinateurs personnels, plage de vitesse: 300, 600, 1200, ..., 115200 bauds. Les vitesses 200 et 10400 bauds, qui utilisent la ligne de diagnostic de la voiture, ne sont pas incluses dans cette série.
Notre tâche consiste à prendre en charge les taux de change, qui sont pris en charge par les contrôleurs FT232 et CP2102, mais ne prennent pas en charge le logiciel "classique". L'idée est de redéfinir les vitesses de la série standard avec de nouvelles valeurs, par exemple, remplacer 14400 bauds par 10400 bauds. Après un tel remplacement, une demande d'activation de 14400 bauds entraînera un 10400 bauds. Le fait est que nous ajoutons une nouvelle vitesse tout en conservant une interface compatible avec les logiciels existants. En principe, toute vitesse d'une série donnée peut être utilisée pour la substitution.
Remplacement de vitesse pour le contrôleur CP2102
Considérez réeldescription décrite idées ci-dessus pour la compatibilité du contrôleur USB - vers - COM CP2102 avec le contrôleur du système de gestion électronique du moteur (ECM) du véhicule. Comme mentionné ci-dessus, les débits de 200 et 10 400 bauds sont typiques pour la ligne de diagnostic K-Line 12 V.
Heureusement, le fabricant du contrôleur CP2102 a fourni la possibilité d'un contrôle flexible des modes de fonctionnement et a fourni à son appareil un utilitaire pour réaffecter les taux de change, donc aujourd'hui nous n'avons pas besoin d'un démonteur et d'un débogueur, nos actions seront très simples et se résumeront à l'utilisation de l'utilitaire standard fourni par Silicon Labs.
Nous notons également que le résultat de nos actions sera de modifier le contenu du tableau stockant les valeurs des diviseurs de fréquence pour les vitesses supportées. Ce tableau est situé dans la mémoire interne non volatile de la puce CP2102, de sorte que les modifications seront enregistrées lorsque vous coupez l'alimentation ou transférez l'appareil reprogrammé vers un autre ordinateur. Pour la plupart des applications, cette option est plus pratique que, par exemple, pour apporter des modifications au pilote. Pour assurer la compatibilité avec la ligne de diagnostic du véhicule et le logiciel utilisé pour surveiller l'ECM, nous devons effectuer les redéfinitions suivantes: 14400 à 10400 et 300 à 200 bauds.
Alors, lancez l'utilitaire CP210 xBaudRateAliasConfig.exe . La fenêtre CP210 x Baud Rate Configuration apparaît. Si plusieurs appareils CP2102 sont connectés, dans la ligne supérieure des appareils connectés, vous devez sélectionner l'appareil que nous allons reprogrammer. Si des périphériques ont été connectés après le démarrage de l'utilitaire, utilisez le bouton Actualiser pour mettre à jour la liste des adaptateurs impliqués.
Cliquez sur le bouton Obtenir la configuration et obtenez une liste des débits en bauds pris en charge pour le périphérique sélectionné.
Si un adaptateur USB-COM est utilisé, la liste est formée automatiquement, s'il y en a plusieurs, vous devez cliquer sur le bouton Get Configuration après avoir sélectionné le périphérique, sinon le tableau sera visualisé qui ne correspond pas à l'adaptateur actuel, mais à celui qui a été précédemment sélectionné!
La colonne de gauche sous le symbole # indique le numéro du mode de vitesse conditionnelle. Les colonnes High et Low de la colonne Application Requested Baud Rate Range contiennent les limites supérieure et inférieure de la plage de vitesse associée à ce mode. Si le paramètre demandé par le logiciel tombe dans cette plage, il est utilisé dans le mode actuel. Pour supporter la vitesse demandée par le logiciel, un mode est utilisé dans la plage dont cette vitesse tombe. Les colonnes Désiré et Réel de la colonne UART Baud Rate indiquent la vitesse de transmission programmée pour ce mode. La valeur souhaitée est une valeur idéale (généralement dans une plage de vitesses standard). Réel - la valeur réelle qui, en raison des particularités des circuits d'horloge du contrôleur, n'est pas toujours égale à l'idéal.
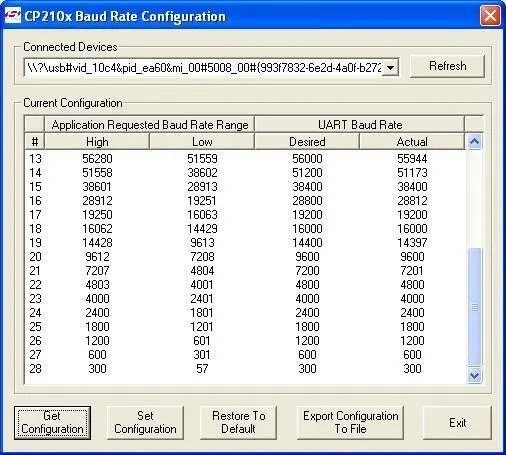
Double-cliquez sur la ligne correspondant au mode édité. Entrez la valeur souhaitée du taux de change - Débit en bauds souhaité. Le débit en bauds réel réel est automatiquement mis à jour. Du point de vue de la norme d'interface série, une tolérance de ± 3% est acceptable. La précision de réglage de la vitesse du CP2102 répond à cette exigence. Modifiez la ligne 19. La valeur initiale du taux de change de 14400 bauds.
Nous entrons une nouvelle valeur - 10400 bauds, cliquez sur OK et la redéfinition est définie! 
Modifiez la ligne 28. La valeur initiale du taux de change de 300 bauds. 
Nous entrons une nouvelle valeur - 200 bauds, cliquez sur OK et le remplacement est défini. 
Une fois toutes les modifications effectuées, n'oubliez pas de cliquer sur le bouton Définir la configuration dans la fenêtre Configuration du débit en bauds CP210 x et vérifiez que les valeurs souhaitées et réelles dans les lignes modifiées ont changé.

À l'aide des utilitaires de diagnostic du port série, vous pouvez vérifier les résultats des actions effectuées en définissant les taux de change correspondant à ceux surdéterminés et en comparant les vitesses établies et mesurées.
De plus, notez que le bouton Avancé vous permet d'affiner les paramètres. Pour remplacer, vous devez cocher la case Remplacer recommandé.

Les paramètres Prescaler (facteur de division pour le diviseur de fréquence préliminaire) et Reload (valeur à charger dans le compteur du diviseur de fréquence principal) déterminent le débit en bauds en bauds selon la formule suivante:
Débit en bauds \u003d ( 24 .000 .000 / Prescaler) / (65536 -Reload)
Notez que le contrôleur CP2102 prend en charge des vitesses allant jusqu'à 1 000 000 bauds en mode de données 7 et 8 bits et 921 0,600 bauds en mode de données 5 et 6 bits, pour une communication en duplex intégral. Si le réglage de la vitesse dépasse les limites spécifiées, le contrôleur peut mal fonctionner.
Le contrôle du délai d'expiration pendant l'échange de données USB s'effectue en modifiant le paramètre Délai de réception USB. La valeur du délai d'attente en secondes est déterminée par la formule:
Délai d'attente \u003d ( 65536 - Recharger) / 500 .000
Le délai spécifié est utilisé lors du transfert des données reçues via une interface série via USB vers un ordinateur. Il détermine la durée pendant laquelle le contrôleur attend l'entrée. Si aucune donnée n'est reçue dans le délai spécifié, le contrôleur termine le transfert USB. La valeur de timeout typique est de 1 ms. La gestion des délais d'attente vous permet de faire des compromis lorsque deux critères mutuellement contradictoires sont atteints:
1. Minimiser le délai de maintenance du périphérique USB par l'ordinateur, ce qui dans ce cas augmente la vitesse de réaction du programme de diagnostic aux événements de l'objet diagnostiqué.
2. Minimiser la charge de l'ordinateur en transférant des paquets de données vides via USB, ce qui se produit lorsqu'aucune donnée n'est reçue via l'interface série. La performance globale en dépend.
Plus le délai est long, plus l'appareil «ne s'endort pas» en l'absence de données, c'est-à-dire pour améliorer le premier critère, le délai doit être augmenté et pour le second réduit.
Remplacement de vitesse pour le contrôleur FT232
Envisagez de résoudre un problème similaire pour l'un des produits concurrents - contrôleur FT232 Entreprises FTDI. Contrairement à l'exemple ci-dessus, nous devons ici modifier le fichier de configuration du pilote de port série FTDIPORT.INF . La structure de ce fichier est décrite dans. La procédure de modification des champs qui définissent la vitesse de transmission pour le port série est décrite dans. Par conséquent, à des fins de présentation compacte, dans notre description, l'attention se concentre uniquement sur les paramètres qui doivent être modifiés. Notez également que cet exemple correspond à l'une des nombreuses options de représentation des paramètres, toutes les options possibles sont répertoriées dans ,.
Nous trouvons l'entrée suivante dans le fichier FTDIPORT.INF:
HKR „" ConfigData ", 1, 01, 00, 3 F, 3 F, 10, 27, 88, 13, C4, 09, E2, 04, 71, 02, 38, 41, 9 s, 80, 4 E, C0, 34, 00, 1 A, 00, 0 D, 00, 06, 40, 03, 80, 00, 00, d0, 80
La séquence, en commençant par le sixième paramètre consécutif, contient des paires d'octets, chacun définissant le coefficient de division de fréquence pour le diviseur, qui détermine le taux de change via l'interface série. Chaque paire correspond à une vitesse spécifique. Considérez la première paire de paramètres 10 h, 27 h.
1. Puisque deux octets adjacents d'un mot de 16 bits sont écrits à partir de l'octet de poids faible, pour obtenir un nombre de 16 bits, ils doivent être échangés: 10
, 27
correspond à 2710 h, h - signifie que le nombre est écrit en notation hexadécimale.
2. Nous traduisons le nombre à 16 décimales 2710 h dans le système binaire.
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 2 | 7 | 1 | 0 | ||||||||||||
3. Nous interprétons la valeur binaire résultante. Les deux bits de poids fort d'un nombre de 16 bits, à savoir les bits 15, 14, déterminent la partie fractionnaire du coefficient de division de fréquence selon le tableau suivant:
| Bit 15 | Bit 14 | Partie fractionnaire du diviseur |
| 0 | 0 | 0 |
| 0 | 1 | 0 .5 |
| 1 | 0 | 0 .25 |
| 1 | 1 | 0 .125 |
Dans notre cas, la partie fractionnaire du diviseur est nulle. Le champ de bits de 13–0 16 - nombre de bits est numériquement égal à la partie entière du diviseur, nous passerons du système hexadécimal à la décimale 2710 h \u003d 10 .000.
4. La fréquence d'horloge à l'entrée du diviseur est de 3 MHz \u003d 3 000 000 000 Hz. Le débit en bauds sera égal à la fréquence d'entrée du diviseur divisée par le coefficient de division.
Débit en bauds \u003d 3.000 .000 / 10 .000 \u003d 300 bauds.
Ainsi, la première paire de valeurs définit la vitesse à 300 bauds. Faisons redéfinir cette vitesse à 10400 bauds. Nous calculons le ratio de division requis (diviseur):
Diviseur \u003d 3 .000 .000 / 10 .400 = 288 ,46
La valeur disponible la plus proche est 288, 5. Nous devons définir la partie entière du diviseur égal 288 fractionnaire égal à 0 ,5 . Selon le tableau 2, les bits 15, 14 seront égaux à 01 b, b - signifie que le nombre est écrit dans le système binaire. Convertir 288 en valeur hexadécimale: 288 \u003d 120 h. Cette valeur doit être placée dans le champ de bits 13 –0. Combinez les bits 15-14 et 13-0, nous obtenons 4120 h.
Pour redéfinir la vitesse de 300 bauds à 10400 bauds, l'enregistrement devrait ressembler à:
HKR „" ConfigData ", 1, 01, 00, 3 F, 3 F, 20, 41, 88, 13, C4, 09, E2, 04, 71, 02, 38, 41, 9 s, 80, 4 E, C0, 34, 00, 1 A, 00, 0 D, 00, 06, 40, 03, 80, 00, 00, d0, 80
Rappelez-vous que si le pilote de périphérique FT232 est déjà installé, pour que les modifications prennent effet, le logiciel du périphérique doit être complètement désinstallé et réinstallé à partir du répertoire dans lequel se trouve le fichier INF modifié. En raison de la nature du système d'exploitation, la fonction de mise à jour du pilote ou de suppression d'un périphérique dans le gestionnaire de périphériques peut ne pas donner de résultat.
Sources d'information.
L'interface UART est prise en charge par presque tous les microcontrôleurs et est très pratique pour développer et déboguer toutes sortes de périphériques MK: téléchargez le micrologiciel via le chargeur de démarrage et affichez les journaux de débogage du périphérique sur l'ordinateur. Mais, hélas, dans les ordinateurs modernes, le port COM disparaît progressivement du nombre d'interfaces disponibles, étant supplanté par le bus USB, et dans les ordinateurs portables, il est absent. Cela nous a intrigués par la question de la fabrication d'un adaptateur USB -\u003e COM. En règle générale, ces adaptateurs sont fabriqués sur la base du microcircuit populaire de la série FT232, mais il présente quelques inconvénients: 1) le coût du microcircuit est d'environ 150 roubles 2) les dimensions microscopiques avec toutes les difficultés qui en découlent pour souder et fabriquer une carte de circuit imprimé.
Comme alternative au FT232, le CP2102 moins connu a été trouvé, qui coûte moitié moins cher, et a des tailles deux fois plus petites et le boîtier QFN-28 (5 mm x 5 mm). Cette puce est un convertisseur USB-UART entièrement prêt à l'emploi qui ne nécessite aucun câblage externe (une paire de condensateurs de filtrage sur le bus d'alimentation ne compte pas) et présente les caractéristiques suivantes:
- compatible USB 2.0, pleine vitesse (12 Mbps)
- eEPROM intégrée de 1024 octets pour stocker l'ID du fabricant, l'ID du produit, le numéro de série, la description de l'appareil, etc.
- vitesse RS232 virtuelle de 300 bps à 1 Mbits
- prise en charge des formats de transfert de données 5, 6, 7 et 8 octets de données; 1, 1,5 et 2 bits d'arrêt, divers contrôles de parité
- tampon récepteur - 576 octets, tampon émetteur - 640 octets
- sources de fréquence de référence intégrées, stabilisateur intégré 3,3 V
- Pilotes pour Windows Vista / XP / Server 2003/2000, Linux, Mac OS-X / OS-9
Schéma
Le circuit adaptateur est extrait de la fiche technique, les périphériques en option ont été jetés et une LED a été ajoutée pour indiquer la présence de courant.
La prise DB9 est câblée de manière similaire à la sortie du port COM de l'ordinateur, voici son câblage (la direction des signaux est indiquée par rapport à l'ordinateur).
Le principal problème dans la conception de l'adaptateur - le problème de la carte de circuit imprimé et de l'installation du QFN-28 a été résolu en collant le microcircuit à l'envers sur la carte de circuit imprimé et en soudant ses résultats avec un fil PEV de 0,1 mm. Un peu morne, mais miniature. Voici le résultat:


Et dans le cas du DB-9, tout se présente comme suit:

Pilotes
Maintenant, après avoir soigneusement vérifié l'installation, vous pouvez tester. Le périphérique a été détecté par le système mais n'a pas pu trouver les pilotes Windows. Je les ai téléchargés. Après cela, un nouveau port est apparu sur mon système - COM5 sous Windows et / dev / ttyUSB0 sous Linux. Maintenant, en connectant RXD à TXD (les 2e et 3e sorties de la fiche de l'adaptateur) et en démarrant n'importe quel terminal COM, vous pouvez vous assurer que les octets sont envoyés .. et reçus .. de plus, ces derniers coïncident avec le premier ..
Un point important: les niveaux de signal à la sortie de l'adaptateur sont TTL et diffèrent des niveaux de signal de l'interface RS232 standard, par conséquent, vous ne pouvez pas connecter directement des appareils ordinaires pour le port COM à l'adaptateur, de plus, cela peut endommager l'adaptateur. Pour connecter des appareils COM standard, il est nécessaire d'ajouter un convertisseur de niveau sur une puce de la famille MAX232.
Ci-dessous, vous pouvez télécharger le projet dans Eagle, ainsi que le dessin fini d'une carte de circuit imprimé pour un fer à repasser au laser (je recommande d'imprimer un dessin sur du papier calque pour repasser une carte de circuit imprimé double face).
Dans le prolongement du sujet «Programmeur AVR910», sur un petit appareil, je souhaite attirer votre attention sur mon prochain «appareil».
À un moment donné, en commençant à maîtriser le microcontrôleur, j'avais pour objectif d'échanger, avec lui, des données avec un ordinateur.
Le contrôleur ATmega16 possède un UART (RS-232) ou, plus simplement, un port COM, uniquement avec des niveaux de 5 Volts.
Pour le "réduire" avec un ordinateur, vous devez augmenter ces niveaux à 10 volts.
Cette opération est principalement effectuée par la puce MAX232.
Il peut être utilisé lorsque le port COM de l'ordinateur (matériel) est utilisé.
Mais je voulais utiliser un port USB. Je suis allé au magasin et j'ai acheté un simple câble de date à mon téléphone portable.
Comme je le pensais, alors tous les câbles sont les mêmes et les broches qu'ils contiennent sont RX et TX.
J'avais tort ... Les câbles qui m'ont traversé ont été fabriqués sur une puce PL2303, qui ne fournit pas de port COM complet.
Sur les trois câbles achetés, j'en ai obtenu un qui, comme on dit, fonctionnait "avec fracas".
Il est basé sur une puce CP-2102. C'est USB-RS232 adaptateur.

Trouver un circuit adaptateur basé sur cette puce sur le réseau, j'ai commencé à assembler l'appareil. Cette puce peut être programmée pour vos données (fabricant, numéro de série, nom de l'appareil, si vous souhaitez connecter votre appareil à un ordinateur). Tout dans les fichiers joints.
Son circuit est très simple.
De plus, le contrôleur peut être connecté immédiatement, sans transfert de niveau (5-10 Volts).
L'exécution, comme toujours, est super minuscule.
Fragment exclu. Notre magazine existe grâce aux dons des lecteurs. La version complète de cet article est uniquement disponible.
Fichiers
Exemple de pilote▼ 🕗 13/12/08 ⚖️ 3,23 Mo ⇣ 435 Bonjour lecteur!
--
Merci de votre attention!
Programme pour créer vos propres pilotes
▼
🕗 13/12/08 ⚖️ 238,88 Ko ⇣ 416
Bonjour lecteur! Je m'appelle Igor, j'ai 45 ans, je suis un Sibérien et un ingénieur passionné d'électronique amateur. J'ai créé, créé et entretenu ce merveilleux site depuis 2006.
Depuis plus de 10 ans, notre magazine n'existe qu'à mes frais.
Bon! Le cadeau est terminé. Si vous voulez des fichiers et des articles utiles, aidez-moi!
--
Merci de votre attention!
Igor Kotov, rédacteur en chef du magazine Datagoras
Schéma et chevalière
▼
🕗 13/12/08 ⚖️ 41,22 Ko ⇣ 461