17. STACJE RADAROWE Z SYNTEZOWĄ PRZYSŁONĄ ANTENOWĄ (RSA)
Radary z długą anteną kadłuba zapewniają szczegółowe obrazy radarowe tylko na stosunkowo krótkie odległości. Przy przedłużaniu pasa rozpoznania kilkadziesiąt kilometrów od samolotu konieczne jest zastosowanie anten o długości kilkudziesięciu i setek metrów, których nie można umieścić na samolocie.
Aby przezwyciężyć tę trudność, stosuje się metodę syntezy apertury anteny, która polega na przechowywaniu sygnałów odbitych od celów na odcinku toru lotu, którego długość jest równa wymaganej długości anteny. Późniejsza obróbka zarejestrowanych sygnałów w sprzęcie pokładowym lub naziemnym umożliwia uzyskanie bardzo szczegółowego obrazu radarowego.
W obecnie najbardziej rozpowszechniony systemy optyczne przetwarzanie. Oparte są na metodzie holograficznej, w której zarejestrowane sygnały radarowe (hologramy radiowe) są wykorzystywane do tworzenia obrazu radarowego.
W Zasada SAR holografii jest stosowana zarówno do rejestracji odbitych fal radiowych, jak i urządzeń optycznych do OOS.
Fala odniesienia, przechodząc przez hologram, tworzy obraz obiektu dokładnie w miejscu, w którym znajdował się w momencie rejestracji hologramu. Obrazek
(kropki) nie będą punktowe, ale nieco rozmyte. Rozmiar plamki δ x, który określa szczegółowość utworzonego obrazu, można znaleźć w wyrażeniu, które ma następującą postać:
8 x \u003d XR / X;
gdzie λ jest długością fali promieniowania; R - Odległość od hologramu do przedmiotu; X to liniowy rozmiar hologramu.
Sformułujmy główne cechy procesu holograficznego:
- wymagane są spójne fale odniesienia i sygnałowe;
- w procesie holografii rozkład amplitudowo-fazowy pola fali sygnału jest zamieniany na rozkład amplitudy sygnału i ten sygnał jest rejestrowany w postaci hologramu (wzór interferencyjny);
- aby przywrócić obraz konieczne jest naświetlanie hologramu falą odniesienia.
Glogramy mają wiele interesujących właściwości. Jedna z nich polega na możliwości zmiany skali obrazu.Jeśli jednocześnie zmieniamy rozmiar liniowy hologramu i długość fali wiązki światła przywracającej obraz tyle samo razy, to odpowiednią ilość razy
zmieni się również skala tworzonego obrazu. Jeśli zmiany długości fali i skali hologramu są nieproporcjonalne, to obraz również powstanie, ale pojawią się w nim zniekształcenia na dużą skalę. W wielu praktyczne zastosowania te zniekształcenia nie są istotne.
Ta właściwość umożliwia rejestrację hologramów na jednej długości fali, na przykład w zakresie radiowym, oraz rekonstrukcję czoła fali i obserwację obrazu na innej długości fali, w zakresie optycznym.
Rozważmy boczny system radarowy zainstalowany na pokładzie samolotu, jak pokazano na rysunku 17.1. Załóżmy, że sekwencja impulsowych sygnałów radarowych jest kierowana na teren z systemu radarowego samolotu, a odbite sygnały, w zależności od współczynnika odbicia terenu, są odbierane z obszaru znajdującego się blisko kursu samolotu. Nazwijmy współrzędną obrazu radarowego, poprzeczną do kierunku lotu, „zasięgiem”, a pokrywającą się z torem lotu - „azymutem”. Wygodne jest również nazywanie współrzędnych łączących trajektorię radaru samolotu z dowolnym celem „zasięgiem skośnym”. Jeśli używany jest konwencjonalny system radarowy, rozdzielczość azymutu będzie rzędu λ r1 / D, gdzie λ to długość fali sygnałów radarowych, r1 to zakres nachylenia, a D to rozmiar apertury anteny wzdłuż toru lotu. Jednak długość fali sygnału radarowego jest o kilka rzędów wielkości większa niż fala optyczna, a zatem, aby uzyskać rozdzielczość kątową porównywalną z rozpoznawczym systemem fotograficznym, wymagana jest bardzo duża apertura anteny D. Wymagana długość anteny może wynosić dziesiątki, a nawet setki metrów. Oczywiście trudno to zrobić w samolocie.
Jednak tę trudność można pokonać, stosując metodę syntetycznej apertury. Podstawową zasadą syntezy apertury jest to, że różne elementy macierzy nie muszą istnieć jednocześnie w przestrzeni. Załóżmy, że samolot ma małą antenę skierowaną z boku, a stosunkowo szeroka wiązka radarowa skanuje obszar, gdy samolot się porusza. Pozycje statku powietrznego, w którym emitowane są impulsy radaru, można traktować jako elementy liniowego układu antenowego. Następnie odebrany sygnał w każdym z tych położeń jest rejestrowany spójnie jako funkcja czasu, ponieważ do odbiornika radaru dostarczany jest sygnał odniesienia, który umożliwia jednoczesny zapis informacji o amplitudzie i fazie. Różne zarejestrowane fale złożone są następnie odpowiednio przetwarzane w celu zsyntetyzowania rzeczywistej apertury.
Aby bardziej szczegółowo zbadać, w jaki sposób ta metoda syntezy anteny jest realizowana, najpierw rozważymy problem z celem punktowym, a następnie rozszerzymy wyniki uzyskane metodą superpozycji na bardziej złożony przypadek. Załóżmy, że cel punktowy znajduje się na x1.
Impuls radarowy jest tworzony przez okresową prostokątną modulację sygnału sinusoidalnego o częstotliwości kątowej równej ω.
Azymut Pole widzenia
gdzie A1 jest odpowiednią stałą zespoloną. Złożona wartość A1 obejmuje takie czynniki, jak moc wypromieniowana, współczynnik odbicia celu, przesunięcie fazowe i prawo propagacji (odwrotnie proporcjonalne do czwartej potęgi mocy). Stosując podejście równoległe do osi, zakres r można zapisać w następujący sposób:
gdzie k \u003d 2π / λ. Wyrażenie (17.3) zależy od t i x, a zmienne przestrzenne i czasowe są ze sobą powiązane relacją
gdzie v jest prędkością samolotu. Jeśli teraz przyjmiemy, że teren w odległości r1 składa się z zestawu n celów punktowych, to stosując metodę superpozycji zapisujemy całkowity sygnał odbity w postaci
S (t) \u003d ∑ An (xn, r1) exp (i [ω t-2kr1 -k (vt-xn) 2 / r1]). (17,5) n \u003d 1
Jeżeli odbity sygnał radarowy, opisany w (17.5), jest demodulowany za pomocą detektora synchronicznego, wówczas zdemodulowany sygnał można zapisać w następujący sposób:
S (t) \u003d ∑ An (xn, r1) cos [ω c t-2kr1 -k (vt-xn) 2 / r1 + ϕ n], (17,6) n \u003d 1
gdzie ω c jest dowolną częstotliwością nośną, a ϕ n jest dowolnym kątem fazowym. Aby zapamiętać odbity sygnał radarowy, użyj
kineskop. Przyłożony do niego zdemodulowany sygnał moduluje natężenie wiązki elektronów, która jest przesuwana w kierunku pionowym synchronicznie z odbitymi impulsami radaru. Jeśli obraz sygnału z ekranu tuby jest rzutowany na kliszę fotograficzną poruszającą się poziomo ze stałą prędkością, to sekwencja dwuwymiarowy obraz (Rysunek 17.2). Linie pionowe reprezentują przemiatanie zakresu, a linie poziome przedstawiają pozycje azymutu. Zatem przechwycony obraz jest zbiorem próbek sygnału S (t). To próbkowanie jest wykonywane w taki sposób, że do czasu nagrania sygnałów na taśmie jest zasadniczo nie do odróżnienia od oryginalnego sygnału. Przy takiej rejestracji jest oczywiste, że zmienne czasowe są zamieniane na zmienne przestrzenne pod względem odległości wzdłuż linii zapisu. Przy prawidłowej ekspozycji przezroczystość filmu rejestrującego przedstawia zmianę azymutu w odbitym sygnale radarowym. Tak więc, jeśli weźmiemy pod uwagę tylko dane zarejestrowane w kierunku y \u003d y1, transmisja amplitudy może być przedstawiona jako
) 2 + ϕ |
||||||||||||||
∑ A (x |
) cos [ω x-2kr |
|||||||||||||
r 1 v f |
||||||||||||||
Zakres (y)

Ślad modulowanego azymutu (x) na podstawie jasności wiązki elektronów
gdzie K1 i K2 - współczynnik przemieszczenia i proporcjonalności, x \u003d vf t - współrzędna filmu; vf - prędkość filmu; ω x \u003d ω c / vf. Ponieważ cosinus można przedstawić jako sumę dwóch wykładników sprzężonych ze sprzężeniem zespolonym, sumę w (7,75) można zapisać jako dwie sumy T1 i T2:
) exp (i [ω x-2kr |
) 2 (x-x |
/ v) 2 + ϕ |
|||||||||||||||||||||||
) \u003d ---- ∑ A |
|||||||||||||||||||||||||
) 2 (x-x |
/ v) 2 + ϕ |
||||||||||||||||||||||||
) \u003d ---- ∑ A |
) exp (-i [ω x-2kr |
||||||||||||||||||||||||
Dla uproszczenia ograniczamy się do jednego celu. Wtedy dla n \u003d j równanie (17.8) przyjmuje postać
) \u003d Cexp (iω x) [- i --- (----) 2 (x - x |
/ v) 2], |
||||||
gdzie C jest odpowiednią stałą zespoloną. Pierwszy wykładnik opisuje liniową funkcję fazową, tj. tylko nachylenie emitowanej fali. Kąt nachylenia do płaszczyzny filmu określa ekspresja
Zatem, z wyjątkiem liniowej funkcji fazowej, (7.76) jest superpozycją N dodatnich cylindrycznych soczewek wyśrodkowanych w punktach określonych wyrażeniem
x \u003d vj xn / v, |
n \u003d 1, 2, ..., N. |
Podobnie (17.9) zawiera liniowy współczynnik fazowy - 0 i opisuje superpozycję N-ujemnych cylindrycznych soczewek o środkach określonych przez (17.14) i ogniskowych opisanych przez (17.13).
Aby przywrócić obraz, przeźroczystość odpowiadająca (17.7) jest oświetlana monochromatyczną falą płaską, jak pokazano na rysunku 17.3. Można następnie wykazać, korzystając z teorii Fresnela-Kirchhoffa lub zasady Huygensa, że \u200b\u200brzeczywiste obrazy wytworzone przez T1 (x, y1) i wirtualne obrazy utworzone przez T2 (x, y1) zostaną zrekonstruowane w przedniej i tylnej płaszczyźnie ogniskowej filmu. Względne położenia obrazów rozpraszaczy punktowych są rozmieszczone wzdłuż linii ogniskowej, ponieważ liczne środki soczewkowatej struktury błony są określone przez położenie rozpraszaczy punktowych. Jednak zrekonstruowany obraz będzie rozmyty w kierunku y; dlatego film ten jest w istocie realizacją jednowymiarowej funkcji wzdłuż y \u003d y1 i dlatego nie ma działania skupiającego się w tym kierunku.
Ponieważ naszym celem jest rekonstrukcja obrazu nie tylko w kierunku azymutu, ale także w kierunku zasięgu, konieczne jest wyświetlenie współrzędnej y bezpośrednio na płaszczyźnie ogniskowej obrazu azymutu. Aby to osiągnąć, należy przypomnieć, że jest on wprost proporcjonalny do zakresu r1. Z kolei ogniskowa jest wprost proporcjonalna do rozważanej współrzędnej y. Tak więc, aby stworzyć mapę terenu, musimy odwzorować współrzędną y transmitowanego sygnału na płaszczyznę, której położenie jest określone przez ogniskowe kierunku azymutu. Można to łatwo osiągnąć, umieszczając dodatnią soczewkę stożkową bezpośrednio za kliszą rejestrującą, jak pokazano na rysunku 17.4. Oczywiście, jeśli przepuszczalność soczewki stożkowej jest
x2 / 2f), |
||||||

f jest funkcją liniową r1, jak pokazano w (17.13), wtedy możliwe jest całkowite usunięcie całej nazwanej płaszczyzny całej urojonej dyfrakcji do nieskończoności, pozostawiając transmitancję w kierunku y niezmienioną. Zatem, jeśli cylindryczna soczewka jest umieszczona w ogniskowej odległości od przezroczystości kliszy, obraz widmo w kierunku y będzie miał nieskończoność. Niech obraz azymutu i obraz w kierunku zasięgu (tj. W kierunkach x i y) pokrywają się, ale w nieskończenie odległym punkcie. Można je przenieść z powrotem na skończoną odległość za pomocą soczewki sferycznej. Dzięki tej operacji rzeczywisty obraz współrzędnych terenu w azymucie i zasięgu będzie skupiony na płaszczyźnie wyjściowej układu. W praktyce jednak pożądany obraz jest przechwytywany przez szczelinę w płaszczyźnie wyjściowej.
Wywołany film wtórny można obejrzeć i zinterpretować.
ZAGRANICZNY PRZEGLĄD WOJSKOWY nr 2/2009, s. 52-57
Kapitan M. VINOGRADOV,
kandydat nauk technicznych
Nowoczesne urządzenia radarowe instalowane na samolotach i statkach kosmicznych to obecnie jeden z najszybciej rozwijających się segmentów sprzętu radioelektronicznego. Tożsamość fizycznych zasad leżących u podstaw konstrukcji tych narzędzi umożliwia rozważenie ich w ramach jednego artykułu. Główne różnice między radarami kosmicznymi i lotniczymi tkwią w zasadach przetwarzania sygnałów radarowych związanych z różnymi rozmiarami apertur, osobliwościach propagacji sygnałów radarowych w różnych warstwach atmosfery, konieczności uwzględnienia krzywizny powierzchni ziemi itp. Mimo tych różnic twórcy radarów mają (PCA) dokładają wszelkich starań, aby zmaksymalizować podobieństwo możliwości tych zasobów rozpoznawczych.»
Obecnie radary pokładowe z syntezą apertury umożliwiają rozwiązywanie zadań rozpoznania gatunków (badanie powierzchni Ziemi w różnych trybach), wybór celów mobilnych i stacjonarnych, analizę zmian sytuacji na ziemi, wykonywanie zdjęć obiektów ukrytych w lasach oraz wykrywanie zakopanych i niewielkich rozmiarów obiektów morskich.
Głównym celem SAR jest szczegółowe badanie powierzchni Ziemi.
Dzięki sztucznemu zwiększaniu apertury anteny pokładowej, której główną zasadą jest spójne gromadzenie odbitych sygnałów radarowych w okresie syntezy, można uzyskać wysoką rozdzielczość kątową. W nowoczesnych systemach rozdzielczość może sięgać kilkudziesięciu centymetrów przy pracy w centymetrowym zakresie długości fal. Podobne wartości rozdzielczości zakresu uzyskuje się dzięki zastosowaniu modulacji wewnątrzimpulsowej, takiej jak chirp. Interwał syntezy otworu anteny jest wprost proporcjonalny do wysokości lotu nośnej SAR, co zapewnia niezależność rozdzielczości pomiarów od wysokości.
Postać: 3. Widok obrazów na różnych poziomach szczegółowości
Obecnie istnieją trzy główne tryby badania powierzchni ziemi: badanie, skanowanie i szczegółowe (rys. 1). W trybie geodezyjnym badanie powierzchni ziemi odbywa się w sposób ciągły w paśmie przechwytywania, natomiast tryb boczny i przednio-boczny są oddzielone (w zależności od orientacji głównego płata wzorca anteny). Akumulacja sygnału prowadzona jest przez czas równy obliczonemu interwałowi syntezy apertury anteny dla danych warunków lotu nośnej radaru. Tryb strzelania skanującego różni się od trybu pomiarowego tym, że strzelanie odbywa się na całej szerokości pokosu, w pasach równych szerokości pokosu. Ten tryb jest używany wyłącznie w radarach kosmicznych. Podczas fotografowania w trybie szczegółowym akumulacja sygnału odbywa się z interwałem zwiększonym w porównaniu z trybem przeglądu. Zwiększenie interwału odbywa się z powodu ruchu głównego płata schematu kierunkowego anteny, synchronicznego z ruchem nośnej radaru, dzięki czemu napromieniowany obszar jest stale w polu strzelania. Nowoczesne systemy pozwalają na uzyskanie obrazów powierzchni ziemi i znajdujących się na niej obiektów w rozdzielczościach rzędu 1 m dla podglądu i 0,3 m dla trybów szczegółowych. Firma Sandia zapowiedziała stworzenie SAR-a dla taktycznych UAV, który ma możliwość strzelania z rozdzielczością 0,1 mw trybie szczegółowym. Zastosowane metody cyfrowego przetwarzania odbieranego sygnału, których istotnym elementem są algorytmy adaptacyjne korygowania zniekształceń trajektorii, mają istotny wpływ na uzyskiwane charakterystyki SAR (w zakresie badania powierzchni ziemi). To właśnie niemożność utrzymania prostoliniowej trajektorii nośnej przez długi czas nie pozwala na uzyskanie rozdzielczości porównywalnych z trybem szczegółowym w trybie ciągłego przeglądu, chociaż nie ma fizycznych ograniczeń rozdzielczości w trybie przeglądu.
Tryb odwrotnej syntezy apertury (IRSA) pozwala na syntezę apertury anteny nie z powodu ruchu nośnej, ale z powodu ruchu napromieniowanego celu. W tym przypadku możemy mówić nie o ruchu translacyjnym, charakterystycznym dla obiektów naziemnych, ale o ruchu wahadłowym (w różnych płaszczyznach), typowym dla sprzętu pływającego kołyszącego się na falach. Ta cecha określa główny cel IRSA - wykrywanie i identyfikację obiektów morskich. Charakterystyka współczesnego IRSA umożliwia pewne wykrycie nawet małych obiektów, takich jak peryskopy podwodne. Wszystkie samoloty będące w służbie Sił Zbrojnych USA i innych stanów, do których zadań należy patrolowanie strefy przybrzeżnej i akwenów wodnych, mają możliwość prowadzenia pomiarów w tym trybie. Obrazy uzyskane w wyniku fotografowania mają zbliżoną charakterystykę do obrazów uzyskanych w wyniku fotografowania z bezpośrednią (nie odwrotną) syntezą apertury.
Tryb interferometryczny SAR (IFSAR) zapewnia trójwymiarowe obrazy powierzchni Ziemi. W którym nowoczesne systemy mają możliwość przeprowadzenia badania jednopunktowego (czyli użycia jednej anteny) w celu uzyskania trójwymiarowych obrazów. Aby scharakteryzować te obrazy, oprócz zwykłej rozdzielczości, dodatkowy parametrzwana dokładnością wysokości lub rozdzielczością wysokości. W zależności od wartości tego parametru określa się kilka standardowych gradacji trójwymiarowych obrazów (DTED - Digital Terrain Elevation Data):
DTEDO .............................. 900m
DTED1 .............................. 90m
DTED2 ............................ 30m
DTED3 .............................. 10m
DTED4 ............................ Zm
DTED5 .............................. 1 m
Rodzaje obrazów obszaru zurbanizowanego (model) odpowiadające różnym poziomom szczegółowości przedstawiono na rys. 3.
Poziomy 3–5 są oficjalnie nazywane „danymi o wysokiej rozdzielczości”(HRTe - Wysoki Rozkład Teren Podniesienie dane). Określenie położenia obiektów naziemnych na obrazach poziomu 0-2 realizowane jest w układzie współrzędnych WGS 84, wysokość mierzona jest względem znaku zerowego. Układ współrzędnych dla obrazów o wysokiej rozdzielczości nie jest obecnie znormalizowany i jest przedmiotem dyskusji. Na rys. 4 przedstawia fragmenty rzeczywistych obszarów powierzchni ziemi uzyskane w wyniku stereofotografii o różnych rozdzielczościach.
W 2000 roku w ramach projektu SRTM (Shuttle Radar Topography Mission) amerykański prom kosmiczny, którego celem było uzyskanie wielkoskalowych informacji kartograficznych, przeprowadził badanie interferometryczne równikowej części Ziemi w pasie od 60 ° N. sh. do 56 ° S. sh., po otrzymaniu na wyjściu trójwymiarowego modelu powierzchni ziemi w formacie DTED2. Projekt NGA HRTe jest rozwijany w USA w celu uzyskania szczegółowych danych 3D? w ramach których dostępne będą obrazy poziomów 3-5.
Oprócz radarowego przeglądu otwartych obszarów powierzchni ziemi, pokładowy radar ma możliwość uzyskania obrazów scen ukrytych przed oczami obserwatora. W szczególności pozwala wykryć obiekty ukryte w lasach, a także te znajdujące się pod ziemią.
Radar penetrujący (GPR, Ground Penetrating Radar) to system teledetekcji, którego zasada opiera się na przetwarzaniu sygnałów odbitych od zdeformowanych lub różniących się składem obszarów w jednorodnej (lub stosunkowo jednorodnej) objętości. System wykrywania powierzchni ziemi umożliwia wykrywanie pustek, pęknięć, zakopanych obiektów znajdujących się na różnych głębokościach oraz identyfikację obszarów o różnej gęstości. W tym przypadku energia odbitego sygnału silnie zależy od właściwości absorpcyjnych gleby, wielkości i kształtu celu oraz stopnia niejednorodności obszarów brzegowych. Obecnie georadar, oprócz skupienia się na zastosowaniach wojskowych, stał się technologią opłacalną komercyjnie.
Sondowanie powierzchni ziemi odbywa się poprzez napromieniowanie impulsami o częstotliwości 10 MHz - 1,5 GHz. Antena zasilająca może być umieszczona na powierzchni ziemi lub na pokładzie samolotu. Część energii promieniowania odbija się od zmian w podpowierzchniowej strukturze ziemi, podczas gdy większość przenika dalej w głąb. Odbity sygnał jest odbierany, przetwarzany, a wyniki przetwarzania są wyświetlane na wyświetlaczu. Gdy antena się porusza, generowany jest ciągły obraz, który odzwierciedla stan podpowierzchniowych warstw gleby. Ponieważ w rzeczywistości odbicie następuje z powodu różnicy przenikalności dielektrycznych różnych substancji (lub różnych stanów jednej substancji), sondowanie może ujawnić dużą liczbę naturalnych i sztucznych defektów w jednorodnej masie warstw podpowierzchniowych. Głębokość penetracji zależy od stanu gleby w miejscu napromieniowania. Spadek amplitudy sygnału (absorpcja lub rozpraszanie) w dużej mierze zależy od szeregu właściwości gleby, z których główną jest jej przewodność elektryczna. Tak więc gleby piaszczyste są optymalne do sondowania. Zdecydowanie gorzej nadają się do tego gleby gliniaste i bardzo wilgotne. Sondowanie suchych materiałów, takich jak granit, wapień, beton, daje dobre wyniki.
Rozdzielczość sondowania można poprawić, zwiększając częstotliwość emitowanych fal. Jednak zwiększenie częstotliwości niekorzystnie wpływa na głębokość wnikania promieniowania. Tak więc sygnały o częstotliwości 500-900 MHz mogą przenikać na głębokość 1-3 mi zapewniają rozdzielczość do 10 cm, a przy częstotliwości 80-300 MHz wnikają na głębokość 9-25 m, ale rozdzielczość wynosi około 1,5 m.
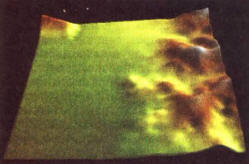
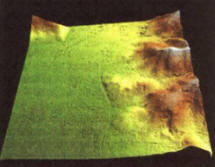
Głównym celem wojskowym radaru podpowierzchniowego jest wykrywanie zasadzonych min. W tym przypadku radar zainstalowany na pokładzie samolotu, np. Helikoptera, umożliwia bezpośrednie otwieranie map pól minowych. Na rys. 5 przedstawia obrazy uzyskane za pomocą stacji radarowej zainstalowanej na pokładzie śmigłowca, odzwierciedlającej lokalizację min przeciwpiechotnych.
Radar pokładowy przeznaczony do wykrywania i śledzenia obiektów ukrytych na obszarach leśnych (FO- DŁUGOPIS - Listowie Przenikliwy), pozwala wykryć małe obiekty (poruszające się i nieruchome), ukryte za koronami drzew. Strzelanie do obiektów ukrytych w lasach odbywa się podobnie jak zwykłe strzelanie w dwóch trybach: przeglądowym i szczegółowym. Średnio w trybie pomiarowym szerokość pokosu wynosi 2 km, co pozwala na uzyskanie na wyjściu obrazów powierzchni terenu o wielkości 2x7 km; w trybie szczegółowym strzelanie odbywa się na odcinkach 3x3 km. Rozdzielczość strzelania zależy od częstotliwości i waha się od 10 m przy częstotliwości 20-50 MHz do 1 m przy częstotliwości 200-500 MHz.
Nowoczesne metody analizy obrazu pozwalają z dość dużym prawdopodobieństwem wykryć i przeprowadzić późniejszą identyfikację obiektów w uzyskanym obrazie radarowym. Jednocześnie detekcja jest możliwa zarówno na zdjęciach o wysokiej (poniżej 1 m), jak i niskiej (do 10 m) rozdzielczości, natomiast rozpoznanie wymaga zdjęć o dostatecznie wysokiej (ok. 0,5 m) rozdzielczości. I nawet w tym przypadku możemy mówić w większości tylko o rozpoznawaniu przez znaki pośrednie, ponieważ geometryczny kształt obiektu jest bardzo zniekształcony z powodu obecności sygnału odbitego od czaszy liściastej, a także z powodu pojawienia się sygnałów o przesunięciu częstotliwości z powodu efektu Dopplera, który występuje w wynik kołysania liści na wietrze.
Na rys. 6 przedstawia obrazy (optyczne i radarowe) tego samego obszaru. Obiekty (kolumna samochodów), które są niewidoczne w obrazie optycznym, są wyraźnie widoczne na radarze, jednak nie można ich zidentyfikować, abstrahując od znaków zewnętrznych (ruch na drodze, odległość między samochodami itp.), Ponieważ przy tej rozdzielczości całkowicie brakuje informacji o strukturze geometrycznej obiektu.
Szczegółowość uzyskanych obrazów radarowych pozwoliła na praktyczne wdrożenie szeregu innych funkcji, co z kolei pozwoliło rozwiązać szereg ważnych problemów praktycznych. Jednym z tych zadań jest śledzenie zmian, które zaszły na określonym obszarze powierzchni Ziemi w określonym czasie - spójne wykrywanie. O długości tego okresu decyduje zazwyczaj częstotliwość patrolowania danego obszaru. Zmiany są śledzone na podstawie analizy dopasowanych do współrzędnych obrazów danego obszaru, uzyskiwanych sekwencyjnie jeden po drugim. W takim przypadku możliwe są dwa poziomy szczegółowości analizy.
Pierwszy poziom zakłada wykrycie znaczących zmian i opiera się na analizie próbek amplitudy obrazu, które niosą główny informacje wizualne... Najczęściej do tej grupy zalicza się zmiany, które człowiek może dostrzec, oglądając jednocześnie dwa wygenerowane obrazy radarowe. Drugi poziom opiera się na analizie odczytów faz i pozwala zidentyfikować zmiany, które są niewidoczne dla ludzkiego oka. Należą do nich pojawienie się śladów (samochodu lub osoby) na jezdni, zmiany stanu okien, drzwi („otwarte - zamknięte”) itp.
Postać: 5. Mapy pól minowych w trójwymiarowej reprezentacji podczas strzelania w różnych polaryzacjach: model (po prawej), przykład obrazu rzeczywistego obszaru powierzchni ziemi ze złożonym środowiskiem podpowierzchniowym (po lewej), uzyskany za pomocą radaru zainstalowanego na pokładzie helikoptera
Inną interesującą funkcją SAR, również zapowiedzianą przez Sandię, jest wideo radarowe. W tym trybie dyskretne formowanie apertury anteny z sekcji na sekcję, charakterystyczne dla trybu ciągłego przeglądu, jest zastępowane przez równoległe formowanie wielokanałowe. Oznacza to, że w każdym momencie syntetyzuje się nie jedną, ale kilka (liczba zależy od rozwiązanych problemów) szczelin. Rodzaj analogu liczby utworzonych apertur to liczba klatek na sekundę w konwencjonalnym filmowaniu wideo. Cecha ta umożliwia realizację selekcji ruchomych celów na podstawie analizy uzyskanych obrazów radarowych, z zastosowaniem zasad koherentnej detekcji, co w istocie stanowi alternatywę dla standardowego radaru, który wybiera cele ruchome na podstawie analizy częstotliwości Dopplera w odbieranym sygnale.
Skuteczność implementacji takich selektorów do ruchomych celów jest wysoce wątpliwa ze względu na znaczne koszty sprzętu i oprogramowania, dlatego takie tryby prawdopodobnie pozostaną tylko eleganckim sposobem rozwiązania problemu selekcji, pomimo możliwości otwarcia na wybór celów poruszających się z bardzo niskimi prędkościami (mniej niż 3 km / h, który nie jest dostępny z Doppler SDC). Bezpośrednie filmowanie wideo w zakresie radaru również nie znalazło obecnie zastosowania, ponownie ze względu na wysokie wymagania dotyczące prędkości, dlatego nie ma istniejących modeli sprzętu wojskowego, które wdrażałyby ten tryb w praktyce.
Logiczną kontynuacją doskonalenia techniki obrazowania powierzchni Ziemi w zakresie radarowym jest rozwój podsystemów analizy otrzymywanych informacji. W szczególności ogromne znaczenie ma rozwój systemów automatycznej analizy obrazów radarowych; Złożoność tworzenia takich systemów wiąże się ze spójnym charakterem obrazów radarowych, zjawiskami interferencji i dyfrakcji, w których dochodzi do pojawienia się artefaktów - sztucznego olśnienia, podobnego do tych, które pojawiają się, gdy naświetlany jest cel o dużej efektywnej powierzchni rozpraszania. Ponadto jakość obrazu radarowego jest nieco niższa niż jakość podobnego (w rozdzielczości) obrazu optycznego. Wszystko to prowadzi do tego, że nie ma obecnie skutecznych implementacji algorytmów rozpoznawania obiektów w obrazach radarowych, ale ilość pracy wykonanej w tym obszarze, pewne sukcesy osiągnięte w ostatnim czasie, sugerują, że w najbliższej przyszłości będzie można mówić o inteligentne bezzałogowe pojazdy rozpoznawcze zdolne do oceny sytuacji naziemnej na podstawie wyników analizy informacji uzyskanych za pomocą własnych pokładowych radarów rozpoznawczych.
Kolejnym kierunkiem rozwoju jest integracja, czyli skoordynowane połączenie z późniejszym wspólnym przetwarzaniem informacji z kilku źródeł. Mogą to być stacje radarowe, które dokonują pomiarów w różnych trybach lub stacje radarowe i inne środki rozpoznania (optyczne, podczerwone, multispektralne itp.).
Tym samym nowoczesne systemy radarowe z syntezą apertury antenowej pozwalają na rozwiązywanie szerokiego zakresu zadań związanych z prowadzeniem badań radarowych powierzchni Ziemi niezależnie od pory dnia i warunków atmosferycznych, co czyni je ważnym środkiem pozyskiwania informacji o stanie powierzchni Ziemi i znajdujących się na niej obiektów.
Aby komentować, musisz zarejestrować się na stronie
Rozdzielczość kątowa - zasadnicza cecha dowolny system teleskopowy. Optyka twierdzi, że rozdzielczość ta jest jednoznacznie związana z długością fali, przy której prowadzona jest obserwacja, oraz ze średnicą apertury wejściowej teleskopu. Wiadomo, że duże średnice stanowią duży problem. Jest mało prawdopodobne, aby kiedykolwiek powstał teleskop większy niż ten.
Jednym ze sposobów na znaczne zwiększenie rozdzielczości jest metoda syntezy dużych i super dużych apertur wykorzystywana w radioastronomii i radarach. W zakresie milimetrowym największą aperturę - 14 km - utworzy 66 anten projektu ALMA w Chile.
Przeniesienie metod syntezy apertury do obszaru optycznego, w którym długości fal są o kilka rzędów wielkości mniejsze niż w przypadku radarów, wiąże się z rozwojem technologii heterodyningu laserowego.
1. Fizyczne podstawy tworzenia obrazu.
Nie byłoby błędem powiedzieć, że obraz w jakimkolwiek urządzeniu optycznym jest tworzony przez dyfrakcję światła przy otworze wejściowym i nic więcej. Spójrzmy na obraz obiektu ze środka apertury. Rozkład kątowy jasności obrazu nieskończenie odległego punktowego źródła światła (jak również każdego innego) będzie taki sam dla obiektywu i kamery otworkowej o równej średnicy. Różnica między soczewką a otworkiem polega tylko na tym, że soczewka przenosi obraz utworzony przez jej aperturę z nieskończoności do płaszczyzny ogniskowej. Lub, innymi słowy, przeprowadza transformację fazową czoła fali wejściowej płaszczyzny w sferycznie zbieżną. W przypadku odległego źródła punktowego i okrągłej apertury obrazem jest znajomy wzór pierścienia Airy. 
Rozmiar kątowy tarczy Airy'ego można w zasadzie zmniejszyć i niejako zwiększyć rozdzielczość (zgodnie z kryterium Rayleigha), jeśli apertura jest przepuszczona w specjalny sposób. Istnieje taki rozkład transmisji wzdłuż promienia, w którym teoretycznie dysk centralny może być dowolnie mały. Jednak w tym przypadku energia światła jest redystrybuowana na pierścieniach, a kontrast złożonego obrazu spada do zera.
Z matematycznego punktu widzenia procedura tworzenia obrazu dyfrakcyjnego sprowadza się do dwuwymiarowej transformaty Fouriera pola światła wejściowego (w przybliżeniu skalarnym pole to jest opisane przez złożoną funkcję współrzędnych i czasu). Każdy obraz zarejestrowany przez oko, ekran, matrycę lub inny kwadratowy odbiornik intensywności to nic innego jak dwuwymiarowe widmo amplitudowe pola świetlnego o ograniczonej aperturze emitowanego przez obiekt. Łatwo jest uzyskać ten sam obraz Airy'ego, jeśli weźmiesz kwadratową macierz o tych samych liczbach zespolonych (symulując płaskie czoło fali z odległego punktu), „wytniesz” z niej okrągłą „aperturę”, wyzerujesz krawędzie i wykonasz transformatę Fouriera całej macierzy.
Krótko mówiąc, jeśli w jakiś sposób zapiszesz pole (zsyntetyzujesz aperturę) na wystarczająco dużym obszarze bez utraty informacji o amplitudzie i fazie, możesz obejść się bez gigantycznych zwierciadeł nowoczesnych teleskopów i matryc megapikselowych, aby uzyskać obraz, po prostu obliczając transformatę Fouriera powstałej tablicy danych.
2. Lokalizacja satelitów i super rozdzielczość.
Będziemy obserwować ustabilizowany obiekt poruszający się w poprzek linii wzroku oświetlony ciągłym spójnym źródłem laserowym. Odbite od niej promieniowanie jest rejestrowane przez heterodynowy fotodetektor o małej aperturze. Rejestracja sygnału w czasie t jest równoważna realizacji jednowymiarowego otworu o długości vt, gdzie v jest prędkością styczną obiektu. Ocena potencjalnej rozdzielczości takiej metody jest łatwa. Przyjrzyjmy się bliżej Ziemi satelicie w górnym wydłużeniu, lecącemu na wysokości 500 km z prędkością 8 km / sek. Za 0,1 sekundy rejestracji sygnału otrzymujemy „jednowymiarowy teleskop” o wielkości 800 metrów, teoretycznie zdolny do badania szczegółów satelitów w widzialnym zakresie ułamka milimetra. Nieźle jak na taką odległość.
Oczywiście odbity sygnał przy takich odległościach jest osłabiany o wiele rzędów wielkości. Jednak odbiór heterodynowy (koherentne mieszanie z promieniowaniem odniesienia) w znacznym stopniu kompensuje to tłumienie. Rzeczywiście, jak wiadomo, fotoprąd wyjściowy odbiornika jest w tym przypadku proporcjonalny do iloczynu amplitud promieniowania odniesienia i sygnału przychodzącego. Zwiększymy ułamek promieniowania odniesienia, a tym samym wzmocnimy cały sygnał.
Możesz spojrzeć z drugiej strony. Widmo zarejestrowanego sygnału z fotodetektora jest zbiorem składowych dopplerowskich, z których każda jest sumą składowych ze wszystkich punktów obiektu o tej samej prędkości radialnej. Jednowymiarowy rozkład punktów odblaskowych na obiekcie określa rozkład częstotliwości linii widmowych. Powstałe widmo jest zasadniczo jednowymiarowym „obrazem” obiektu wzdłuż współrzędnej „przesunięcia Dopplera”. Dwa punkty naszego satelity, położone w odległości 1 mm od siebie w płaszczyźnie prostopadłej do linii wzroku, mają różnicę prędkości radialnych rzędu 0,01-0,02 mm / sek. (Stosunek tej różnicy do prędkości satelity jest równy stosunkowi odległości między punktami do odległości do satelity). Różnica między częstotliwościami Dopplera tych punktów dla widzialnej długości fali 0,5 mikrona będzie (f \u003d 2V / λ) rzędu 100 Hz. Widmo (obraz dopplerowski) z całego mikrosatelity, powiedzmy o wielkości 10 cm, będzie pasowało do zakresu 10 kHz. Całkiem wymierna wartość.
Możesz też spojrzeć na to z trzeciej strony. Ta technologia to nic innego jak zapis hologramowy, tj. wzór interferencji powstający podczas mieszania pól odniesienia i sygnału. Zawiera informacje o amplitudzie i fazie wystarczające do odtworzenia pełnego obrazu obiektu.
W ten sposób oświetlając satelitę laserem, rejestrując odbity sygnał i mieszając go z wiązką odniesienia z tego samego lasera, otrzymujemy na fotodetektorze fotoprąd, którego zależność od czasu odzwierciedla strukturę pola świetlnego wzdłuż "jednowymiarowej apertury", której długość, jak już wspomniano, można określić wystarczająco duży.
Dwuwymiarowa przysłona jest oczywiście znacznie lepsza i zawiera więcej informacji. Ułóżmy równo kilka fotodetektorów w poprzek ruchu satelity i zapiszmy w ten sposób odbijane pole na obszarze vt * L, gdzie L to odległość między skrajnymi fotodetektorami, która w zasadzie nie jest niczym ograniczona. Na przykład te same 800 metrów. W ten sposób syntetyzujemy aperturę „dwuwymiarowego teleskopu” 800 * 800 metrów. Rozdzielczość wzdłuż współrzędnej poprzecznej (L) będzie zależała od liczby fotodetektorów i odległości między nimi, z drugiej strony od współrzędnej „czasowej” (vt) - od szerokości pasma promieniowania laserowego i częstotliwości digitalizacji sygnału z fotodetektora.
Mamy więc zarejestrowane pole świetlne na bardzo dużym obszarze i możemy z nim zrobić, co tylko zechcemy. Na przykład, uzyskaj obraz 2D bardzo małych obiektów z bardzo dużej odległości bez żadnych teleskopów. Lub możesz przywrócić trójwymiarową strukturę obiektu przez ponowne ogniskowanie zakresu cyfrowego.
Oczywiście, rzeczywista trójwymiarowa konfiguracja punktów odbicia na obiekcie nie zawsze pokrywa się z ich rozkładem prędkości radialnej „Dopplera”. Zbieg okoliczności będzie miał miejsce, jeśli te punkty będą na tej samej płaszczyźnie. Ale nawet w ogólnym przypadku z „obrazu Dopplera” można wydobyć wiele użytecznych informacji.
3. Co wydarzyło się wcześniej.
Amerykańska DARPA jakiś czas temu sfinansowała program, którego istotą było wdrożenie takiej technologii. Miał on lokalizować obiekty na ziemi (na przykład czołgi) z ultrawysoką rozdzielczością z lecącego samolotu, uzyskano kilka zachęcających danych. Jednak program ten został zamknięty lub sklasyfikowany w 2007 roku i od tego czasu nic o nim nie słyszano. W Rosji też coś zrobiono. Tutaj możesz zobaczyć obraz uzyskany przy długości fali 10,6 mikrona.
4. Trudności w realizacji technicznej przy długości fali 1,5 mikrona.
Po namyśle postanowiłem nic tutaj nie pisać. Jest zbyt wiele problemów.
5. Niektóre wyniki podstawowe.
Do tej pory trudno było „zbadać” z odległości 300 metrów szczegóły płaskiego, odbijającego rozpraszająco metalowego przedmiotu o wymiarach 6 na 3 mm. To był kawałek jakiejś płytki drukowanej, oto zdjęcie: 
Obiekt obracał się wokół osi prostopadłej do linii wzroku, a odbity sygnał rejestrowano w przybliżeniu w momencie maksymalnego odbicia (rozbłysku). Plama lasera oświetlająca obiekt miała wielkość około 2 cm, zastosowano tylko 4 fotodetektory, oddalone od siebie o 0,5 metra. Wielkość zsyntetyzowanej apertury szacuje się na 0,5 m na 10 m.
Właściwie na wszelki wypadek same zarejestrowane sygnały (po lewej) i ich widma (po prawej) w jednostkach względnych: 
Z poprzedniego zdjęcia obiektu wybrano tylko oświetlone i odbijające światło interesujące nas obszary, które chcemy zobaczyć za pomocą Photoshopa: 
Obraz zrekonstruowany za pomocą dwuwymiarowej transformaty Fouriera z 4 sygnałów i przeskalowany do porównania: 
Ten obraz składa się w rzeczywistości tylko z 4 linii (i około 300 kolumn), rozdzielczość pionowa obrazu wynosi odpowiednio około 0,5 mm, ale wydaje się, że ciemny róg i oba okrągłe otwory są widoczne. Rozdzielczość pozioma wynosi 0,2 mm, jest to szerokość ścieżek przewodzących na płytce, wszystkie pięć elementów jest widoczne. (Typowy teleskop musi mieć dwa metry średnicy, aby móc je zobaczyć w bliskiej podczerwieni).
Tak naprawdę rozdzielczość nadal jest daleka od teoretycznej granicy, więc fajnie byłoby przypomnieć sobie tę technologię. Diabeł, jak wiesz, tkwi w szczegółach, a tutaj jest wiele szczegółów.
Dziękuję za uwagę.
Syntetyzacja apertury anteny to jeden z najbardziej obiecujących kierunków rozwoju radaru, który pojawił się pod koniec lat pięćdziesiątych i od razu przyciągnął szerokie zainteresowanie. Główną zaletą tego kierunku jest wielokrotny (1000 i więcej razy) wzrost rozdzielczości kątowej radaru. Jednocześnie zapewniona jest możliwość obrazowania radiowego obiektów radarowych i wykrywania obiektów o niewielkich rozmiarach, zwiększenie dokładności wyznaczania celów i odporności radaru na zakłócenia. Na pierwszym etapie rozwoju tego kierunku osiągnięto główne sukcesy w znacznym wzroście skuteczności rozpoznania powietrzno-kosmicznego. Później metody syntezy apertury zaczęto stosować w kompleksach rozpoznawczych i uderzeniowych, wielofunkcyjnych radarach lotniczych do wykrywania małych i grupowych celów oraz naprowadzania na nie broni, w radarach do przeglądu planowego, rozpoznaniu elektronicznym i systemach nawigacyjnych.
Teoria i praktyka rozwijały się w dwóch etapach, od radaru po obrazowanie radiowe.
W pierwszym etapie, dzięki zastosowaniu szerokopasmowych (100 MHz i więcej) sygnałów sondujących, udało się zapewnić wysoką rozdzielczość opóźnienia sygnału, a co za tym idzie wysoką rozdzielczość w zasięgu (kilka metrów lub więcej). Rozdzielczość zakresu jest określona przez wyrażenie
Szerokość widma sygnału sondującego.
![]() - długość fali radaru; z 1 - rozmiarem anteny,
- długość fali radaru; z 1 - rozmiarem anteny,
![]()

Tworzenie wzoru prawdziwej anteny. Aby wyjaśnić zasadę syntezy apertury, rozważmy najpierw tworzenie wzoru promieniowania prawdziwej anteny, która określa rozdzielczość wzdłuż współrzędnej kątowej konwencjonalnego radaru.
Niech będzie liniowa apertura anteny o rozmiarze d, na którą pada płaska fala elektromagnetyczna pod kątem 0 (rys. 2.1), tj. antena odbiera.
Apertura (otwór) odnosi się do tej części anteny, która bierze udział w emisji lub odbiorze fali elektromagnetycznej. Czoło fali to powierzchnia równych faz. W rozważanym przypadku jest to samolot. Faza fali elektromagnetycznej wzdłuż apertury (oś X) jest określona przez opóźnienie czoła fali względem środka apertury:

gdzie r (x) jest odległością od czoła fali do punktu x na aperturze.
Wzór promieniowania powstaje w wyniku sumowania w fazie fali elektromagnetycznej padającej na aperturę:

Intensywność fali elektromagnetycznej.
Znormalizowany wzór promieniowania w tym przypadku to

na poziomie 0,7 lub, czyli tyle samo, 0,5 mocy:
![]()
Gdy działa jedna antena, nie tylko do odbioru, ale także do transmisji, wzór jest zdefiniowany jako

i równoważna szerokość wzoru do nadawania i odbioru
![]()
![]()
![]()
W bardziej ogólnym przypadku apertura anteny określa wielkość analizowanego sygnału czasoprzestrzennego, czyli zależność siły, fazy i polaryzacji pola elektromagnetycznego od współrzędnych przestrzennych i czasu. Tym samym aperturę charakteryzują geometryczne wymiary analizowanej objętości fali elektromagnetycznej, czas analizy, parametry polaryzacji i częstotliwości. W tym przypadku rozdzielczość kątowa jest określana przez zmianę sygnału czasoprzestrzennego w aperturze anteny w zależności od położenia kątowego źródła fal elektromagnetycznych.
Dobrze znanymi przykładami takiego sygnału czasoprzestrzennego są wolumetryczne soczewki holograficzne i syntetyczne apertury.

Synteza apertury. Główna różnica między zsyntetyzowanymi (sztucznymi) aperturami a konwencjonalnymi (rzeczywistymi) otworami antenowymi polega na tym, że syntetyzowana apertura (SA) jest tworzona sekwencyjnie w czasie. W każdym ten moment odbiór fali elektromagnetycznej odbywa się za pomocą apertury rzeczywistej, a zsyntetyzowana apertura jest wynikiem sukcesywnego odbioru fali elektromagnetycznej przez aperturę rzeczywistą w czasie w jej innym położeniu względem źródła fali elektromagnetycznej. Rozważmy proces syntezy na przykładzie powstania prostoliniowej apertury SAR (rys. 2.2).
Jego kierunkowy wzorzec odbioru jest określany w taki sam sposób, jak BP rzeczywistej apertury. Wtargnięcie fazy fali pomiędzy dwoma położeniami rzeczywistej anteny na trajektorii

dwa razy większe od szczeliny konwencjonalnej, co wynika z dwukrotnego przejścia odległości r przez falę elektromagnetyczną (podczas nadawania i odbioru). W rezultacie szerokość wzoru promieniowania dla syntetyzowanej apertury SAR tego typu okazuje się być mniejsza niż szerokość rzeczywistej apertury o tym samym rozmiarze:

Głównym rezultatem syntezy apertury jest to, że rozmiar apertury zwiększył się N razy w porównaniu z rozmiarem rzeczywistej apertury.
w wyniku tego powstała zsyntetyzowana apertura
poruszanie prawdziwą anteną. W tym przypadku efekt uzyskuje się poprzez zwiększenie objętości analizowanego pola w czasie i przestrzeni.
Główne właściwości zsyntetyzowanej apertury. Rozważmy główne właściwości zsyntetyzowanej apertury.
dla pokładowych statków powietrznych i systemów kosmicznych. Typowe wartości względnych rozmiarów apertury różne systemy następujące:
Ze względu na duży rozmiar apertury SAR możliwe jest uzyskanie wysokiej rozdzielczości liniowej we współrzędnej kątowej na dużych odległościach:

Zsyntetyzowana apertura powstaje w wyniku odbioru i przetwarzania sygnałów odbitych od celu, tj. syntetyzowana apertura określa DP tylko do odbioru. DP do transmisji podczas syntezy apertury jest określane przez DP prawdziwej anteny. Właściwości polaryzacyjne i częstotliwościowe SA są również określane przez rzeczywistą antenę.
Podczas syntezy apertury tylko jeden element anteny (antena rzeczywista) może działać (emitować, odbierać) w tym samym czasie. W tym przypadku problemy elektrodynamiczne nie pojawiają się podczas formowania całej apertury, ponieważ nie ma interakcji elementów w polu elektromagnetycznym. Zadanie syntezy apertury i formowania wiązki sprowadza się tak naprawdę do opracowania algorytmów i ich wykonania przez procesor sygnału trajektorii. Jeśli chodzi o prawdziwą antenę, wzór anteny syntetyzowanej apertury jest zależnością sygnału na wyjściu procesora od współrzędnej kątowej źródła promieniowania punktowego lub ponownego promieniowania (w przypadku aktywnego SAR).
Wzór może być jednowiązkowy, wielowiązkowy, jednopulsowy, adaptacyjny itp.
obiekty obserwacji SAR w większości przypadków znajdują się w strefie pośredniej (strefa Fresnela) apertury, a nie w strefie dalekiej, jak w większości rzeczywistych anten. Podczas odbioru w dalekim polu czoło fali na aperturze jest uważane za płaskie. Wraz ze wzrostem wielkości apertury (lub zmniejszeniem odległości do obiektu) nie można lekceważyć kulistości czoła fali. Zwykle warunek dalekiego pola jest zapisywany jako
![]()
W przypadku radaru pokładowego z prawdziwą anteną granica odległej strefy wynosi około 100 m, a po zsyntetyzowaniu jest obliczana w tysiącach kilometrów. Dlatego przy przetwarzaniu sygnału trajektorii w SAR konieczne jest uwzględnienie sferyczności czoła fazy fali elektromagnetycznej. W najprostszym SAR, gdy rozmiar SA jest mały, krzywizna czoła fali elektromagnetycznej nie jest brana pod uwagę. Ten tryb nazywa się zwężeniem wiązki Dopplera (DOL), a wzrost rozdzielczości jest niewielki (10 ... 30) razy.
Uwzględnienie sferyczności czoła fali podczas przetwarzania sygnału trajektorii nazywa się ogniskowaniem, a apertura odpowiednio nazywana jest aperturą zogniskowaną. Na rys. 2.3 przedstawia rozkład pola nieogniskowych (DOL) (a) i skupionych (b) otworów w środkowej i dalekiej strefie wzorca anteny.

Na odległość ogniskowania, tj. taka sama jak konwencjonalna antena dalekiego pola. Można powiedzieć, że proces ogniskowania przenosi właściwości kierunkowe apertury ze strefy dalekiej do strefy pośredniej.
Ponieważ kulistość czoła fali zależy od odległości od obiektu, dla różnych odległości wymagane jest inne prawo ogniskowania, tj. Aby zapewnić skupienie SA, potrzebny jest wielokanałowy algorytm przetwarzania sygnału trajektorii.
Dzięki ogniskowaniu CA zapewnia w strefie pośredniej rozdzielczość nie tylko pod kątem, ale także w zakresie, nawet przy sygnale modulowanym. Jednak jest on zwykle mały, a rozdzielczość zakresu zapewnia modulowanie sygnału sondy.
Głównymi źródłami błędów - niespójności sygnału trajektorii - są niestabilności fazowe modułów nadawczo-odbiorczych, niestabilności trajektorii nośnej SAR oraz niestabilność ośrodka propagacji fal elektromagnetycznych. Tak więc dopuszczalny błąd znajomości trajektorii ruchu anteny wynosi kilka milimetrów (w centymetrowym zakresie fali elektromagnetycznej). Wymaga to specjalnych środków w celu skompensowania tych błędów za pomocą systemów mikronawigacji i algorytmów autofokusa.
Charakterystyki mocy SA (stosunek sygnału do szumu wewnętrznego) są określone przez wzmocnienie rzeczywistej anteny i czas syntezy, tj. czas koherentnej akumulacji sygnałów. Odporność na zakłócenia z zewnętrznych zakłóceń czynnych i pasywnych jest określona zarówno przez wzór anteny rzeczywistej anteny, jak i przez właściwości kierunkowe SA, tj. wybór interferencji przestrzennej.
Rzeczywiście, w każdym położeniu anteny podczas syntezy apertury moc odbieranego sygnału jest określana przez moc promieniowania i wzmocnienie anteny, a dodawanie w fazie tych sygnałów podczas syntezy jest równoważne z akumulacją energii sygnału podczas syntezy przy stałej mocy widmowej szumu wewnętrznego. Ponadto możliwy jest dobór kątowy ze względu na źródła zakłóceń zewnętrznych, których skuteczność zależy od wzoru rzeczywistych i syntetyzowanych otworów.
Względny ruch anteny i obiektu wymagany do utworzenia SA można wykonać różnymi metodami. Tworzenie SA w wyniku ruchu anteny ze stacjonarnym obiektem nazywa się syntezą bezpośrednią, a tworzenie SA podczas ruchu obiektu i stacjonarnej anteny nazywa się syntezą odwrotną. W tym przypadku powstanie SA jest możliwe w wyniku obrotu obiektu, co jest równoznaczne z ruchem anteny wokół obiektu.
Zastosowanie w procesie syntezy jednocześnie nie jednej, ale wielu anten umożliwia syntezę nie tylko liniowych, ale także płaskich i wolumetrycznych SA.
![]() co jest niezwykle trudnym zadaniem dla pokładowych komputerów cyfrowych. W warunkach naziemnych problem ten z powodzeniem rozwiązuje procesor optyczny, który wykorzystuje rejestrację sygnału trajektorii na kliszy fotograficznej i przetwarzanie sygnału analogowego za pomocą spójnego układu optycznego.
co jest niezwykle trudnym zadaniem dla pokładowych komputerów cyfrowych. W warunkach naziemnych problem ten z powodzeniem rozwiązuje procesor optyczny, który wykorzystuje rejestrację sygnału trajektorii na kliszy fotograficznej i przetwarzanie sygnału analogowego za pomocą spójnego układu optycznego.
Synteza apertury zajmuje pewien czas, co prowadzi do opóźnienia informacji w SAR. Minimalne opóźnienie informacji jest określone przez czas syntezy, tj. czas powstania SA. Zwykle są to dziesiąte - jednostki sekund. Maksymalne opóźnienie jest określane z uwzględnieniem czasu wykonania algorytmu syntezy przez odpowiedni procesor do przetwarzania sygnałów trajektorii. Naziemne procesory optyczne mają największą latencję. Składa się z czasu przelotu samolotu w rejonie operacji SAR, czasu powrotu do bazy, czasu dostarczenia kliszy fotograficznej z rejestracją sygnałów trajektorii do laboratorium, czasu obróbki fotochemicznej kliszy, obróbki optycznej i rejestracji obrazu na kliszy wtórnej oraz wreszcie obróbki fotochemicznej kliszy wtórnej. Ten czas może trwać nawet kilka godzin.
Kapitan M. Vinogradov,
kandydat nauk technicznych
Nowoczesne urządzenia radarowe instalowane na samolotach i statkach kosmicznych to obecnie jeden z najszybciej rozwijających się segmentów sprzętu radioelektronicznego. Tożsamość fizycznych zasad leżących u podstaw konstrukcji tych narzędzi umożliwia rozważenie ich w ramach jednego artykułu. Główne różnice między radarami kosmicznymi i lotniczymi tkwią w zasadach przetwarzania sygnałów radarowych związanych z różnymi rozmiarami apertur, osobliwościach propagacji sygnałów radarowych w różnych warstwach atmosfery, konieczności uwzględnienia krzywizny powierzchni ziemi itp. Mimo tych różnic twórcy radarów mają (PCA) dokładają wszelkich starań, aby zmaksymalizować podobieństwo możliwości tych zasobów rozpoznawczych.
Obecnie radary pokładowe z syntezą apertury pozwalają rozwiązywać zadania związane z rozpoznaniem gatunków (badanie powierzchni ziemi w różnych trybach), wybierać cele ruchome i stacjonarne, analizować zmiany sytuacji na ziemi, robić zdjęcia obiektów ukrytych w lasach oraz wykrywać zakopane i niewielkie obiekty morskie.
Głównym celem SAR jest szczegółowe badanie powierzchni Ziemi.

|
|
| Postać: 1. Tryby fotografowania nowoczesnego SAR (a - szczegółowy, b - przegląd, c - skanowanie) | Postać: 2. Przykłady rzeczywistych obrazów radarowych o rozdzielczości 0,3 m (góra) i 0,1 m (dół) |

|
|
| Postać: 3. Widok obrazów na różnych poziomach szczegółowości | |
|
|
| Postać: 4. Przykłady fragmentów rzeczywistych obszarów powierzchni ziemi uzyskanych na poziomach szczegółowości DTED2 (po lewej) i DTED4 (po prawej) | |
Poprzez sztuczne zwiększenie apertury anteny pokładowej, której główną zasadą jest spójne gromadzenie odbitych sygnałów radarowych w przedziale syntezy, możliwe jest uzyskanie wysokiej rozdzielczości kątowej. W nowoczesnych systemach rozdzielczość może sięgać kilkudziesięciu centymetrów przy pracy w centymetrowym zakresie długości fal. Podobne wartości rozdzielczości zakresu uzyskuje się dzięki zastosowaniu modulacji wewnątrzimpulsowej, takiej jak chirp. Interwał syntezy apertury anteny jest wprost proporcjonalny do wysokości lotu nośnej SAR, co zapewnia niezależność rozdzielczości pomiaru od wysokości.
Obecnie istnieją trzy główne tryby badania powierzchni ziemi: badanie, skanowanie i szczegółowe (rys. 1). W trybie geodezyjnym badanie powierzchni ziemi odbywa się w sposób ciągły w paśmie przechwytywania, a tryb boczny i przednio-boczny są oddzielone (w zależności od orientacji głównego płata wzorca anteny). Akumulacja sygnału prowadzona jest przez czas równy obliczonemu interwałowi syntezy apertury anteny dla danych warunków lotu nośnej radaru. Tryb strzelania skanującego różni się od trybu pomiarowego tym, że strzelanie odbywa się na całej szerokości pokosu, w pasach równych szerokości pokosu. Ten tryb jest używany wyłącznie w radarach kosmicznych. Podczas fotografowania w trybie szczegółowym akumulacja sygnału odbywa się z interwałem zwiększonym w porównaniu z trybem przeglądu. Zwiększenie interwału odbywa się z powodu ruchu głównego płata schematu kierunkowego anteny, synchronicznego z ruchem nośnej radaru, dzięki czemu napromieniowany obszar jest stale w polu strzelania. Nowoczesne systemy pozwalają na uzyskanie obrazów powierzchni ziemi i znajdujących się na niej obiektów w rozdzielczościach rzędu 1 m dla podglądu i 0,3 m dla trybów szczegółowych. Firma Sandia zapowiedziała stworzenie SAR-a dla taktycznych UAV, który ma możliwość strzelania z rozdzielczością 0,1 mw trybie szczegółowym. Zastosowane metody cyfrowego przetwarzania odbieranego sygnału, których istotnym elementem są algorytmy adaptacyjne korygowania zniekształceń trajektorii, mają istotny wpływ na uzyskiwane charakterystyki SAR (w zakresie badania powierzchni ziemi). To właśnie niemożność utrzymywania prostej trajektorii nośnej przez długi czas nie pozwala na uzyskanie rozdzielczości porównywalnych z trybem szczegółowym w trybie ciągłego przeglądu, chociaż nie ma fizycznych ograniczeń rozdzielczości w trybie przeglądu.
Tryb odwrotnej syntezy apertury (IRSA) pozwala na syntezę apertury anteny nie z powodu ruchu nośnej, ale z powodu ruchu napromieniowanego celu. W tym przypadku możemy mówić nie o ruchu translacyjnym, charakterystycznym dla obiektów naziemnych, ale o ruchu wahadłowym (w różnych płaszczyznach), typowym dla sprzętu pływającego kołyszącego się na falach. Ta cecha określa główny cel IRSA - wykrywanie i identyfikację obiektów morskich. Charakterystyka współczesnego IRSA umożliwia pewne wykrycie nawet małych obiektów, takich jak peryskopy podwodne. Wszystkie samoloty będące w służbie Sił Zbrojnych USA i innych stanów, do których zadań należy patrolowanie strefy przybrzeżnej i akwenów wodnych, mają możliwość prowadzenia pomiarów w tym trybie. Obrazy uzyskane w wyniku strzelania mają zbliżoną charakterystykę do obrazów uzyskanych w wyniku fotografowania z bezpośrednią (nie odwrotną) syntezą przysłony.
Tryb interferometryczny SAR (IFSAR) zapewnia trójwymiarowe obrazy powierzchni Ziemi. Jednocześnie nowoczesne systemy mają możliwość prowadzenia jednopunktowego badania (czyli korzystania z jednej anteny) w celu uzyskania trójwymiarowych obrazów. Aby scharakteryzować te obrazy, oprócz zwykłej rozdzielczości, wprowadza się dodatkowy parametr, zwany dokładnością określania wysokości lub rozdzielczością wysokości. W zależności od wartości tego parametru określa się kilka standardowych gradacji trójwymiarowych obrazów (DTED - Digital Terrain Elevation Data):
DTEDO .............................. 900 m
DTED1 .............................. 90m
DTED2 ............................ 30m
DTED3 .............................. 10m
DTED4 ............................ Zm
DTED5 .............................. 1m
Rodzaje obrazów obszaru zurbanizowanego (model) odpowiadające różnym poziomom szczegółowości przedstawiono na rys. 3.
Poziomy 3-5 są oficjalnie nazywane danymi HRTe-High Resolution Terrain Elevation. Określenie położenia obiektów naziemnych na obrazach poziomu 0-2 realizowane jest w układzie współrzędnych WGS 84, wysokość mierzona jest względem znaku zerowego. Układ współrzędnych dla obrazów o wysokiej rozdzielczości nie jest obecnie znormalizowany i jest przedmiotem dyskusji. Na rys. 4 przedstawia fragmenty rzeczywistych obszarów powierzchni ziemi uzyskane w wyniku fotografii stereoskopowej o różnych rozdzielczościach.
W 2000 roku w ramach projektu SRTM (Shuttle Radar Topography Mission) amerykański prom kosmiczny, którego celem było uzyskanie wielkoskalowych informacji kartograficznych, przeprowadził badanie interferometryczne równikowej części Ziemi w pasie od 60 ° N. sh. do 56 ° S. sh., po otrzymaniu na wyjściu trójwymiarowego modelu powierzchni ziemi w formacie DTED2. Projekt NGA HRTe jest rozwijany w USA w celu uzyskania szczegółowych danych 3D? w ramach których dostępne będą obrazy poziomów 3-5.
Oprócz radarowego przeglądu otwartych obszarów powierzchni ziemi, pokładowy radar ma możliwość uzyskania obrazów scen ukrytych przed oczami obserwatora. W szczególności pozwala wykryć obiekty ukryte w lasach, a także te znajdujące się pod ziemią.
Radar penetracyjny (GPR, Ground Penetrating Radar) to system teledetekcji, którego zasada działania opiera się na przetwarzaniu sygnałów odbitych od zdeformowanych lub różniących się składem obszarów w jednorodnej (lub względnie jednorodnej) objętości. System wykrywania powierzchni ziemi umożliwia wykrywanie pustek, pęknięć, obiektów zakopanych na różnych głębokościach oraz identyfikację obszarów o różnej gęstości. W tym przypadku energia odbitego sygnału silnie zależy od właściwości absorpcyjnych gleby, wielkości i kształtu celu oraz stopnia niejednorodności obszarów granicznych. Obecnie georadar, oprócz skupienia się na zastosowaniach wojskowych, stał się technologią opłacalną komercyjnie.
Sondowanie powierzchni ziemi odbywa się poprzez napromieniowanie impulsami o częstotliwości 10 MHz - 1,5 GHz. Antena zasilająca może być umieszczona na powierzchni ziemi lub na pokładzie samolotu. Część energii promieniowania odbija się od zmian w podpowierzchniowej strukturze ziemi, podczas gdy większość przenika dalej w głąb. Odbity sygnał jest odbierany, przetwarzany, a wyniki przetwarzania są wyświetlane na wyświetlaczu. Gdy antena się porusza, generowany jest ciągły obraz, który odzwierciedla stan podpowierzchniowych warstw gleby. Ponieważ w rzeczywistości odbicie następuje z powodu różnicy przenikalności dielektrycznych różnych substancji (lub różnych stanów jednej substancji), sondowanie może ujawnić dużą liczbę naturalnych i sztucznych defektów w jednorodnej masie warstw podpowierzchniowych. Głębokość penetracji zależy od stanu gleby w miejscu napromieniowania. Spadek amplitudy sygnału (absorpcja lub rozpraszanie) w dużej mierze zależy od szeregu właściwości gleby, z których główną jest jej przewodność elektryczna. Tak więc gleby piaszczyste są optymalne do sondowania. Zdecydowanie gorzej nadają się do tego gleby gliniaste i bardzo wilgotne. Sondowanie suchych materiałów, takich jak granit, wapień, beton, daje dobre wyniki.
Rozdzielczość sondowania można poprawić, zwiększając częstotliwość emitowanych fal. Jednak zwiększenie częstotliwości niekorzystnie wpływa na głębokość wnikania promieniowania. Tak więc sygnały o częstotliwości 500-900 MHz mogą przenikać na głębokość 1-3 mi zapewniają rozdzielczość do 10 cm, a przy częstotliwości 80-300 MHz wnikają na głębokość 9-25 m, ale rozdzielczość wynosi około 1,5 m.
Głównym celem wojskowym radaru podpowierzchniowego jest wykrywanie zasadzonych min. W tym przypadku radar zainstalowany na pokładzie samolotu, np. Helikoptera, umożliwia bezpośrednie otwieranie map pól minowych. Na rys. 5 przedstawia obrazy uzyskane za pomocą stacji radarowej zainstalowanej na pokładzie śmigłowca, odzwierciedlającej lokalizację min przeciwpiechotnych.
Radar powietrzny, przeznaczony do wykrywania i śledzenia obiektów ukrytych w lasach (FO-PEN - FOliage PENetrating), umożliwia wykrywanie małych obiektów (ruchomych i nieruchomych), ukrytych za koronami drzew. Strzelanie do obiektów ukrytych w lasach odbywa się podobnie jak zwykłe strzelanie w dwóch trybach: przeglądowym i szczegółowym. Średnio w trybie pomiarowym szerokość pokosu wynosi 2 km, co pozwala na uzyskanie na wyjściu obrazów powierzchni terenu o wielkości 2x7 km; w trybie szczegółowym strzelanie odbywa się na odcinkach 3x3 km. Rozdzielczość strzelania zależy od częstotliwości i waha się od 10 m przy częstotliwości 20-50 MHz do 1 m przy częstotliwości 200-500 MHz.
Nowoczesne metody analizy obrazu pozwalają z dość dużym prawdopodobieństwem wykryć i przeprowadzić późniejszą identyfikację obiektów w uzyskanym obrazie radarowym. Jednocześnie detekcja jest możliwa zarówno na zdjęciach o wysokiej (poniżej 1 m), jak i niskiej (do 10 m) rozdzielczości, natomiast rozpoznanie wymaga zdjęć o dostatecznie wysokiej (ok. 0,5 m) rozdzielczości. I nawet w tym przypadku możemy mówić w większości tylko o rozpoznawaniu przez znaki pośrednie, ponieważ geometryczny kształt obiektu jest bardzo zniekształcony z powodu obecności sygnału odbitego od czaszy liściastej, a także z powodu pojawienia się sygnałów o przesunięciu częstotliwości z powodu efektu Dopplera, który występuje w wynik kołysania liści na wietrze.
Na rys. 6 przedstawia obrazy (optyczne i radarowe) tego samego obszaru. Obiekty (kolumna samochodów), niewidoczne w obrazie optycznym, są wyraźnie widoczne na radarze, jednak nie można ich zidentyfikować, abstrahując od znaków zewnętrznych (ruch na drodze, odległość między samochodami itp.) struktura geometryczna obiektu jest całkowicie nieobecna.
Szczegółowość uzyskanych obrazów radarowych pozwoliła na praktyczne wdrożenie szeregu innych funkcji, co z kolei pozwoliło rozwiązać szereg ważnych problemów praktycznych. Jednym z tych zadań jest śledzenie zmian, które zaszły na określonym obszarze powierzchni Ziemi w określonym czasie - spójne wykrywanie. O długości tego okresu decyduje zazwyczaj częstotliwość patrolowania danego obszaru. Zmiany są śledzone na podstawie analizy dopasowanych do współrzędnych obrazów danego obszaru, uzyskiwanych sekwencyjnie jeden po drugim. W takim przypadku możliwe są dwa poziomy szczegółowości analizy.

|

|
| Rys 5. Mapy pól minowych w trójwymiarowej reprezentacji podczas strzelania w różnych polaryzacjach: model (po prawej), przykład obrazu rzeczywistego obszaru powierzchni ziemi ze złożonymi warunkami podpowierzchniowymi (po lewej), uzyskany za pomocą radaru zainstalowanego na pokładzie helikoptera | |

|
|
| Postać: 6. Obrazy optyczne (u góry) i radarowe (u dołu) miejsca z konwojem samochodów poruszających się po leśnej drodze | |

|
|
Pierwszy poziom zakłada wykrycie znaczących zmian i opiera się na analizie odczytów amplitudy obrazu, które niosą główne informacje wizualne. Najczęściej do tej grupy zalicza się zmiany, które człowiek może dostrzec, oglądając jednocześnie dwa wygenerowane obrazy radarowe. Drugi poziom opiera się na analizie odczytów faz i pozwala zidentyfikować zmiany, które są niewidoczne dla ludzkiego oka. Należą do nich pojawienie się śladów (samochodu lub osoby) na jezdni, zmiany stanu okien, drzwi („otwarte - zamknięte”) itp.
Inną interesującą funkcją SAR, również zapowiedzianą przez Sandię, jest wideo radarowe. W tym trybie dyskretne formowanie apertury anteny z sekcji na sekcję, charakterystyczne dla trybu ciągłego przeglądu, jest zastępowane przez równoległe formowanie wielokanałowe. Oznacza to, że w każdym momencie syntetyzuje się nie jedną, ale kilka (liczba zależy od rozwiązanych problemów) szczelin. Rodzaj analogu liczby utworzonych apertur to liczba klatek na sekundę w konwencjonalnym filmowaniu wideo. Cecha ta umożliwia realizację selekcji ruchomych celów na podstawie analizy uzyskanych obrazów radarowych, z zastosowaniem zasad koherentnej detekcji, co w istocie stanowi alternatywę dla standardowego radaru, który wybiera cele ruchome na podstawie analizy częstotliwości Dopplera w odbieranym sygnale. Skuteczność implementacji takich selektorów do ruchomych celów jest wysoce wątpliwa ze względu na znaczne koszty sprzętu i oprogramowania, dlatego takie tryby prawdopodobnie pozostaną tylko eleganckim sposobem rozwiązania problemu selekcji, pomimo możliwości otwarcia na wybór celów poruszających się z bardzo niskimi prędkościami (mniej niż 3 km / h, który nie jest dostępny z Doppler SDC). Bezpośrednie filmowanie wideo w zakresie radaru również nie znalazło obecnie zastosowania, ponownie ze względu na wysokie wymagania dotyczące prędkości, dlatego nie ma istniejących modeli sprzętu wojskowego, które wdrażałyby ten tryb w praktyce.
Logiczną kontynuacją doskonalenia techniki obrazowania powierzchni Ziemi w zakresie radarowym jest rozwój podsystemów analizy otrzymywanych informacji. W szczególności ogromne znaczenie ma rozwój systemów automatycznej analizy obrazów radarowych; Złożoność tworzenia takich systemów wiąże się ze spójnym charakterem obrazów radarowych, zjawiskami interferencji i dyfrakcji, w których dochodzi do pojawienia się artefaktów - sztucznego olśnienia, podobnego do tych, które pojawiają się, gdy naświetlany jest cel o dużej efektywnej powierzchni rozpraszania. Ponadto jakość obrazu radarowego jest nieco niższa niż jakość podobnego (w rozdzielczości) obrazu optycznego. Wszystko to prowadzi do tego, że nie ma obecnie skutecznych implementacji algorytmów rozpoznawania obiektów w obrazach radarowych, ale ilość pracy wykonanej w tym obszarze, pewne sukcesy osiągnięte w ostatnim czasie, sugerują, że w najbliższej przyszłości będzie można mówić o inteligentne bezzałogowe pojazdy rozpoznawcze zdolne do oceny sytuacji naziemnej na podstawie wyników analizy informacji uzyskanych za pomocą własnych pokładowych radarów rozpoznawczych.
Kolejnym kierunkiem rozwoju jest integracja, czyli skoordynowane połączenie z późniejszym wspólnym przetwarzaniem informacji z kilku źródeł. Mogą to być stacje radarowe, które dokonują pomiarów w różnych trybach lub stacje radarowe i inne środki rozpoznania (optyczne, podczerwone, multispektralne itp.).
Tym samym nowoczesne systemy radarowe z syntezą apertury antenowej pozwalają na rozwiązywanie szerokiego zakresu zadań związanych z prowadzeniem badań radarowych powierzchni Ziemi niezależnie od pory dnia i warunków atmosferycznych, co czyni je ważnym środkiem pozyskiwania informacji o stanie powierzchni Ziemi i znajdujących się na niej obiektów.
Zagraniczny przegląd wojskowy nr 2 2009 P.52-56


