W tym artykule porozmawiamy o serwach w projektach Arduino. To dzięki serwomotorom zwykłe projekty elektroniczne stają się zrobotyzowane. Podłączenie serwomechanizmu do projektu Arduino umożliwia reagowanie na sygnały czujników pewnym precyzyjnym ruchem, takim jak otwieranie drzwi lub obracanie czujników we właściwym kierunku. W artykule omówiono zagadnienia sterowania serwami, możliwe schematy podłączenia serw do arduino, a także przykłady szkiców.
Serwonapęd to rodzaj napędu, który może precyzyjnie sterować parametrami ruchu. Innymi słowy, jest to silnik, który może obracać swój wał o określony kąt lub utrzymywać ciągły obrót w określonym czasie.
Działanie serwomechanizmu opiera się na wykorzystaniu sprzężenia zwrotnego (obwód zamknięty, w którym sygnał na wejściu i wyjściu nie jest dopasowany). Jako serwonapęd może pełnić dowolny rodzaj napędu mechanicznego, który obejmuje czujnik i jednostkę sterującą, która automatycznie utrzymuje wszystkie ustawione parametry na czujniku. Konstrukcja serwonapędu składa się z silnika, czujnika położenia oraz układu sterowania. Głównym zadaniem takich urządzeń jest implementacja w zakresie serwomechanizmów. Również serwonapędy są często wykorzystywane w takich dziedzinach jak obróbka materiałów, produkcja urządzeń transportowych, obróbka drewna, produkcja blach, produkcja materiałów budowlanych i inne.
W projektach robotyki arduino, serwo jest często używane do prostych czynności mechanicznych:
- Obróć dalmierz lub inne czujniki pod określonym kątem, aby zmierzyć odległość w wąskim polu widzenia robota.
- Zrób mały krok stopą, ruchem kończyny lub głowy.
- Tworzenie robotycznych manipulatorów.
- Aby wdrożyć mechanizm kierowniczy.
- Otwórz lub zamknij drzwi, przepustnicę lub inny przedmiot.
Oczywiście zakres serw w realnych projektach jest znacznie szerszy, ale podane przykłady to najpopularniejsze układy.
Schemat i rodzaje serw

Zasada działania serwomechanizmu opiera się na sprzężeniu zwrotnym z jednego lub więcej sygnałów systemowych. Wskaźnik wyjściowy jest podawany na wejście, gdzie jego wartość jest porównywana z akcją ustawiania i wykonywane są niezbędne czynności - na przykład silnik jest wyłączony. Najprostszą implementacją jest rezystor zmienny, którym steruje wałek - wraz ze zmianą parametrów rezystora zmieniają się parametry prądu zasilającego silnik.
W prawdziwych serwomechanizmach mechanizm sterowania jest znacznie bardziej skomplikowany i wykorzystuje wbudowane chipy kontrolera. W zależności od rodzaju zastosowanego mechanizmu sprzężenia zwrotnego, istnieją analog oraz cyfrowy serwa. Ci pierwsi używają czegoś, co wygląda jak potencjometr, ci drudzy używają kontrolerów.
 Cały obwód serwomechanizmu znajduje się wewnątrz obudowy, sygnały sterujące i zasilanie są dostarczane z reguły trzema przewodami: uziemieniem, napięciem zasilania i sygnałem sterującym.
Cały obwód serwomechanizmu znajduje się wewnątrz obudowy, sygnały sterujące i zasilanie są dostarczane z reguły trzema przewodami: uziemieniem, napięciem zasilania i sygnałem sterującym.
Serwo obrotowe o 360, 180 i 270 stopni
Istnieją dwa główne typy serwomotorów - z ciągłym obrotem i ze stałym kątem (najczęściej 180 lub 270 stopni). Różnica między serwomechanizmem o ograniczonym obrocie polega na mechanicznych elementach konstrukcyjnych, które mogą blokować ruch wału poza kątami określonymi przez parametry. Po osiągnięciu kąta 180 wał wpłynie na ogranicznik i wyda polecenie wyłączenia silnika. Serwomotory do pracy ciągłej nie posiadają takich ograniczników.
Materiały przekładni serwo
W większości serw łącznikiem pomiędzy wałem a elementami zewnętrznymi jest koło zębate, dlatego bardzo ważne jest, z jakiego materiału jest wykonany. Dostępne są dwie najbardziej dostępne opcje: metalowe lub plastikowe zębatki. W droższych modelach można znaleźć elementy karbonowe, a nawet tytanowe.


Warianty z tworzywa sztucznego są oczywiście tańsze, łatwiejsze w produkcji i często są stosowane w niedrogich modelach serwo. W przypadku projektów szkoleniowych, gdy serwo wykonuje kilka ruchów, nie stanowi to problemu. Ale w poważnych projektach użycie plastiku jest niemożliwe ze względu na bardzo szybkie zużycie takich kół zębatych pod obciążeniem.
 Metalowe koła zębate są bardziej niezawodne, ale to oczywiście wpływa zarówno na cenę, jak i wagę modelu. Oszczędni producenci mogą wykonać niektóre części z tworzyw sztucznych, a niektóre z metalu, należy o tym również pamiętać. I oczywiście, że w najtańszych modelach nawet obecność metalowego sprzętu nie jest gwarancją jakości.
Metalowe koła zębate są bardziej niezawodne, ale to oczywiście wpływa zarówno na cenę, jak i wagę modelu. Oszczędni producenci mogą wykonać niektóre części z tworzyw sztucznych, a niektóre z metalu, należy o tym również pamiętać. I oczywiście, że w najtańszych modelach nawet obecność metalowego sprzętu nie jest gwarancją jakości.
Przekładnie tytanowe lub węglowe to najlepsza opcja, jeśli masz ograniczony budżet. Lekkie i niezawodne, takie serwa są szeroko stosowane do tworzenia modeli samochodów, dronów i samolotów.
Zalety serwomotorów
Szerokie zastosowanie serwonapędów wynika z faktu, że charakteryzują się stabilną pracą, wysoką odpornością na zakłócenia, niewielkimi rozmiarami oraz szerokim zakresem regulacji prędkości. Ważnymi cechami serwonapędów jest możliwość zwiększania mocy i dostarczania informacji zwrotnej. Wynika z tego, że w kierunku do przodu obwód jest przekaźnikiem energii, a w kierunku odwrotnym jest przekaźnikiem informacji, która służy do poprawy dokładności sterowania.
Różnice między serwomechanizmem a silnikiem konwencjonalnym
Włączając lub wyłączając konwencjonalny silnik elektryczny, możemy generować ruch obrotowy i wprawiać w ruch koła lub inne przedmioty przymocowane do wału. Ten ruch będzie ciągły, ale aby zrozumieć, pod jakim kątem obrócił się wał lub ile obrotów wykonał, konieczne będzie zainstalowanie dodatkowych elementów zewnętrznych: enkoderów. Serwo zawiera już wszystko, co niezbędne do uzyskania informacji o aktualnych parametrach obrotu i potrafi się wyłączyć, gdy wałek skręci pod żądanym kątem.
Różnice między serwomechanizmem a silnikiem krokowym
 Istotną różnicą między serwomotorem a silnikiem krokowym jest możliwość pracy z dużymi przyspieszeniami i zmiennym obciążeniem. Silniki serwo mają również większą moc. Silniki krokowe nie posiadają sprzężenia zwrotnego, dzięki czemu można zaobserwować efekt utraty kroku, w serwomotorach utrata kroku jest wykluczona - wszystkie naruszenia będą rejestrowane i korygowane. Przy tych wszystkich oczywistych zaletach serwosilniki są droższe niż silniki krokowe, mają bardziej złożone okablowanie i system sterowania oraz wymagają bardziej wykwalifikowanej konserwacji. Należy zauważyć, że silniki krokowe i serwonapędy nie są bezpośrednią konkurencją – każde z tych urządzeń ma swój specyficzny zakres.
Istotną różnicą między serwomotorem a silnikiem krokowym jest możliwość pracy z dużymi przyspieszeniami i zmiennym obciążeniem. Silniki serwo mają również większą moc. Silniki krokowe nie posiadają sprzężenia zwrotnego, dzięki czemu można zaobserwować efekt utraty kroku, w serwomotorach utrata kroku jest wykluczona - wszystkie naruszenia będą rejestrowane i korygowane. Przy tych wszystkich oczywistych zaletach serwosilniki są droższe niż silniki krokowe, mają bardziej złożone okablowanie i system sterowania oraz wymagają bardziej wykwalifikowanej konserwacji. Należy zauważyć, że silniki krokowe i serwonapędy nie są bezpośrednią konkurencją – każde z tych urządzeń ma swój specyficzny zakres.
Gdzie kupić popularne serwa SG90, MG995, MG996
 Najbardziej przystępna opcja serwo SG90 1.6 KG Najbardziej przystępna opcja serwo SG90 1.6 KG
|
 Serwa SG90 i MG90S dla Arduino w cenie poniżej 70 rubli Serwa SG90 i MG90S dla Arduino w cenie poniżej 70 rubli
|
 Kolejna opcja serwo SG90 Pro 9g od zaufanego dostawcy na Ali Kolejna opcja serwo SG90 Pro 9g od zaufanego dostawcy na Ali
|
 Serwo SG90 od niezawodnego dostawcy RobotDyn Serwo SG90 od niezawodnego dostawcy RobotDyn
|
 Tester serwo Tester serwo
|
 Kilka opcji serwomechanizmu Kilka opcji serwomechanizmu
|
 Chronione serwo z momentem obrotowym 15 kg Chronione serwo z momentem obrotowym 15 kg
|
 Serwo JX DC5821LV 21KG w pełni wodoodporny rdzeń mentalny sprzęt 1/8 1/10 RC skaler samochodowy Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Serwo JX DC5821LV 21KG w pełni wodoodporny rdzeń mentalny sprzęt 1/8 1/10 RC skaler samochodowy Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Serwo MG996R MG996 Serwo metalowa przekładnia do Futaba JR Serwo MG996R MG996 Serwo metalowa przekładnia do Futaba JR
|
 Serwo 13KG 15KG Serwa Cyfrowe MG995 MG996 MG996R Serwo Metal Gear Serwo 13KG 15KG Serwa Cyfrowe MG995 MG996 MG996R Serwo Metal Gear
|
 Decydującym czynnikiem w sterowaniu serwami jest sygnał sterujący, który jest impulsem o stałej częstotliwości i zmiennej szerokości. Długość impulsu jest jednym z najważniejszych parametrów określających położenie serwomechanizmu. Długość tę można ustawić ręcznie w programie metodą wyboru przez narożnik lub za pomocą poleceń z biblioteki. Dla każdej marki urządzenia długość może być inna.
Decydującym czynnikiem w sterowaniu serwami jest sygnał sterujący, który jest impulsem o stałej częstotliwości i zmiennej szerokości. Długość impulsu jest jednym z najważniejszych parametrów określających położenie serwomechanizmu. Długość tę można ustawić ręcznie w programie metodą wyboru przez narożnik lub za pomocą poleceń z biblioteki. Dla każdej marki urządzenia długość może być inna.
Gdy sygnał wchodzi do obwodu sterującego, generator podaje swój impuls, którego czas trwania określa się za pomocą potencjometru. W innej części obwodu porównywany jest czas trwania przyłożonego sygnału i sygnału z generatora. Jeżeli sygnały te mają różny czas trwania, włączany jest silnik elektryczny, którego kierunek obrotu jest określony przez to, który z impulsów jest krótszy. Jeśli długości impulsów są równe, silnik zatrzymuje się.
 Standardowa częstotliwość, z jaką stosowane są impulsy, wynosi 50 Hz, czyli 1 impuls na 20 milisekund. Przy tych wartościach czas trwania wynosi 1520 mikrosekund, a serwomechanizm znajduje się w pozycji środkowej. Zmiana długości impulsu prowadzi do obrotu serwomechanizmu - wraz ze wzrostem czasu obrót jest zgodny z ruchem wskazówek zegara, ze spadkiem - przeciwnie do ruchu wskazówek zegara. Istnieją limity czasu trwania - w Arduino w bibliotece Servo dla 0° wartość impulsu jest ustawiona na 544 μs (limit dolny), dla 180° - 2400 μs (limit górny).
Standardowa częstotliwość, z jaką stosowane są impulsy, wynosi 50 Hz, czyli 1 impuls na 20 milisekund. Przy tych wartościach czas trwania wynosi 1520 mikrosekund, a serwomechanizm znajduje się w pozycji środkowej. Zmiana długości impulsu prowadzi do obrotu serwomechanizmu - wraz ze wzrostem czasu obrót jest zgodny z ruchem wskazówek zegara, ze spadkiem - przeciwnie do ruchu wskazówek zegara. Istnieją limity czasu trwania - w Arduino w bibliotece Servo dla 0° wartość impulsu jest ustawiona na 544 μs (limit dolny), dla 180° - 2400 μs (limit górny).

(Wykorzystany obraz z amperka.ru)
Należy pamiętać, że na konkretnym urządzeniu ustawienia mogą nieznacznie różnić się od ogólnie przyjętych wartości. W przypadku niektórych urządzeń średnia pozycja i szerokość impulsu mogą wynosić 760 µs. Wszystkie akceptowane wartości mogą się również nieznacznie różnić ze względu na błąd, który może zostać dopuszczony podczas produkcji urządzenia.
Metoda sterowania napędem jest często błędnie nazywana PWM / PWM, ale nie jest to do końca poprawne. Kontrola bezpośrednio zależy od długości impulsów, częstotliwość ich występowania nie jest tak ważna. Prawidłowe działanie będzie zapewnione zarówno przy 40 Hz, jak i przy 60 Hz, przyczyni się tylko silna redukcja lub wzrost częstotliwości. Przy gwałtownym spadku serwonapęd zacznie szarpać, jeśli częstotliwość wzrośnie powyżej 100 Hz, urządzenie może się przegrzać. Dlatego lepiej jest zadzwonić do PDM.
Zgodnie z interfejsem wewnętrznym można rozróżnić serwa analogowe i cyfrowe. Nie ma różnic zewnętrznych - wszystkie różnice dotyczą tylko wewnętrznej elektroniki. Serwonapęd analogowy zawiera wewnątrz specjalny mikroukład, cyfrowy zawiera mikroprocesor, który odbiera i analizuje impulsy.

Po otrzymaniu sygnału serwo analogowe decyduje o przesunięciu pozycji iw razie potrzeby wysyła sygnał do silnika z częstotliwością 50 Hz. W czasie reakcji (20 ms) mogą wystąpić wpływy zewnętrzne, które zmienią położenie serwomechanizmu, a urządzenie nie będzie miało czasu na reakcję. Serwo cyfrowe wykorzystuje procesor, który wysyła i przetwarza sygnały o wyższej częstotliwości - od 200 Hz, dzięki czemu może szybciej reagować na wpływy zewnętrzne, szybko osiągnąć pożądaną prędkość i moment obrotowy. Dlatego serwo cyfrowe lepiej utrzyma ustawioną pozycję. Jednocześnie serwo cyfrowe wymaga do działania większej ilości energii elektrycznej, co zwiększa ich koszt. Duży wpływ na cenę ma również złożoność ich produkcji. Jedyną wadą serw cyfrowych jest wysoki koszt, technicznie znacznie lepsze od urządzeń analogowych.
Podłączanie serwomotoru do arduino
Serwo posiada trzy styki, które są pokolorowane w różnych kolorach. Brązowy przewód prowadzi do uziemienia, czerwony przewód do zasilania +5V, pomarańczowy lub żółty przewód jest sygnałem. Urządzenie jest połączone z Arduino poprzez płytkę stykową jak pokazano na rysunku. Pomarańczowy przewód (sygnał) jest podłączony do pinu cyfrowego, czarnego i czerwonego - odpowiednio do masy i zasilania. Do sterowania serwomotorem nie jest wymagane podłączenie specjalnie do kołków podkładek - zasadę sterowania serwo opisaliśmy już wcześniej.
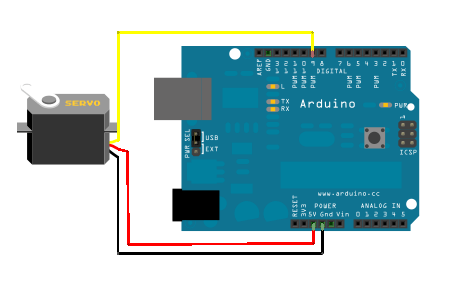
Nie zaleca się podłączania potężnych serw bezpośrednio do płyty. wytwarzają prąd, który nie jest kompatybilny z życiem dla obwodu zasilania Arduino - będziesz miał szczęście, jeśli zabezpieczenie zadziała. Najczęstsze objawy przeciążenia i niewłaściwego zasilania serwomechanizmu to szarpanie serwa, nieprzyjemny dźwięk i reset płytki. W przypadku zasilania lepiej jest korzystać ze źródeł zewnętrznych, pamiętaj o połączeniu mas dwóch obwodów.
Szkic sterowania serwo Arduino
Sterowanie serwo bezpośrednio poprzez zmianę czasu trwania impulsu w szkicu nie jest trywialnym zadaniem, ale na szczęście mamy doskonałą bibliotekę Servo wbudowaną w środowisko programistyczne Arduino. Wszystkie niuanse programowania i pracy z serwami rozważymy w osobnym artykule. Tutaj podajemy najprostszy przykład użycia Servo.
Algorytm pracy jest prosty:
- Najpierw dołączamy Servo.h
- Utwórz obiekt klasy Servo
- W bloku konfiguracji określ, do którego pinu podłączone jest serwo
- Używamy metod obiektu w zwykły sposób C++. Najpopularniejsza jest metoda write, do której podajemy wartość całkowitą w stopniach (dla serwa 360 te wartości będą różnie interpretowane).
Przykład prostego szkicu do pracy z serwomechanizmem
Przykładowy projekt, w którym od razu ustawiamy serwomotor pod kątem zerowym, a następnie obracamy go o 90 stopni.
#włączać
Szkic na dwa serwa
W tym przykładzie pracujemy z dwoma serwomechanizmami jednocześnie:
#włączać
Sterowanie serwo z potencjometrem
W tym przykładzie kręcimy serwo w zależności od wartości otrzymanej z potencjometru. Odczytujemy wartość i konwertujemy ją na kąt za pomocą funkcji map:
//Fragment standardowego przykładu użycia biblioteki Servo void loop() ( val = analogRead(A0); // Odczytaj wartość z pinu do którego podłączony jest potencjometr val = map(val, 0, 1023, 0, 180); // Konwertuj liczbę z zakresu od 0 do 1023 na nowy zakres - od 0 do 180. servo.write(val); delay(15); )

Charakterystyka i podłączenie SG-90
Jeśli chcesz kupić najtańsze i najprostsze serwo, najlepszym wyborem będzie SG 90. Serwo to jest najczęściej używane do sterowania małymi, lekkimi maszynami o kącie obrotu od 0° do 180°.
Dane techniczne SG90:
- Szybkość przetwarzania poleceń 0,12 s/60 stopni;
- Zasilanie 4,8V;
- Temperatury pracy od -30C do 60C;
- Wymiary 3,2 x 1,2 x 3 cm;
- Waga 9g.
Opis SG90
Kolory przewodów są standardowe. Serwomechanizm jest niedrogi i nie zapewnia precyzyjnych ustawień pozycji początkowej i końcowej. Aby uniknąć niepotrzebnych przeciążeń i charakterystycznych trzasków w pozycji 0 i 180 stopni, lepiej ustawić skrajne punkty na 10° i 170°. Podczas obsługi urządzenia ważne jest monitorowanie napięcia zasilania. Przy silnym przeszacowaniu tego wskaźnika mogą ulec uszkodzeniu elementy mechaniczne mechanizmów przekładni.
Serwa MG995 i MG996 tower pro
Serwo MG995 to drugi najpopularniejszy model serwomechanizmu najczęściej łączony z projektami Arduino. Są to stosunkowo niedrogie serwa o znacznie lepszej wydajności niż SG90.
Dane techniczne MG995
Wał wyjściowy w MG995 obraca się o 120 stopni (60 w każdym kierunku), chociaż wielu sprzedawców wskazuje 180 stopni. Urządzenie wykonane jest w plastikowej obudowie.
- Waga 55g;
- moment obrotowy 8,5 kg x cm;
- Prędkość 0,2s/60 stopni (przy 4,8V);
- Moc robocza 4,8 - 7,2V;
- Temperatury pracy - od 0C do -55C.
Opis MG995
Połączenie z arduino odbywa się również trzema przewodami. W zasadzie w projektach amatorskich można podłączyć MG995 bezpośrednio do Arduino, ale prąd silnika zawsze będzie stwarzał niebezpieczne obciążenie dla wejść płytki, dlatego zaleca się nadal osobno zasilać serwa, pamiętając o podłączeniu uziemienie obu obwodów mocy. Inną opcją ułatwiającą życie jest wykorzystanie gotowych kontrolerów serw i osłon, o których omówimy w osobnym artykule.
MG996R jest podobny do MG995 pod względem funkcji, tylko w metalowej obudowie.
Konwersja serwa na serwo z ciągłym obrotem
Jak opisano powyżej, serwo jest sterowane impulsami o zmiennej szerokości, które ustawiają kąt obrotu. Aktualna pozycja jest odczytywana z potencjometru. Jeśli wałek i potencjometr są rozłączone, serwomotor przyjmie pozycję suwaka potencjometru jak w punkcie środkowym. Wszystkie te działania doprowadzą do tego, że informacje zwrotne zostaną usunięte. Pozwala to kontrolować prędkość i kierunek obrotów na przewodzie sygnałowym i stworzyć serwomechanizm o ciągłym obrocie. Należy zauważyć, że serwo stałoobrotowe nie może obracać się o określony kąt i wykonywać ściśle określonej liczby obrotów.
Aby wykonać powyższe kroki, będziesz musiał zdemontować urządzenie i wprowadzić zmiany w projekcie.
W Arduino IDE musisz stworzyć mały szkic, który ustawi rocker w środkowej pozycji.
#włączać
Następnie urządzenie należy podłączyć do Arduino. Po podłączeniu serwo zacznie się obracać. Konieczne jest osiągnięcie całkowitego zatrzymania poprzez regulację rezystora. Po zatrzymaniu obrotu należy znaleźć wałek, wyciągnąć z niego elastyczny element i zamontować go z powrotem.
Ta metoda ma kilka wad - ustawienie rezystora na całkowite zatrzymanie jest niestabilne, przy najmniejszym wstrząsie / nagrzewaniu / chłodzeniu ustawiony punkt zerowy może zejść na manowce. Dlatego lepiej jest zastosować metodę wymiany potencjometru na trymer. W tym celu wyciągnij potencjometr i zastąp go trymerem o takim samym oporze. Punkt zerowy należy wyregulować za pomocą szkicu kalibracyjnego.
Każda metoda zamiany serwa na serwo z ciągłym obrotem ma swoje wady. Po pierwsze, trudno jest wyregulować punkt zerowy, każdy ruch może go obniżyć. Po drugie, zakres regulacji jest niewielki – przy niewielkiej zmianie szerokości impulsu prędkość może się znacząco zmienić. Asortyment można rozszerzyć programowo w Arduino.
Wniosek
Serwonapędy odgrywają bardzo ważną rolę w wielu projektach Arduino, od robotyki po systemy inteligentnego domu. Wszystko, co wiąże się z ruchem tradycyjnie wymaga specjalnej wiedzy, a stworzenie pełnowartościowego, poprawnie działającego napędu nie jest łatwym zadaniem. Ale dzięki serwomotorom można w wielu przypadkach uprościć zadanie, więc serwo jest stale używane nawet w projektach na poziomie podstawowym.
W tym artykule staraliśmy się omówić różne aspekty korzystania z serwomechanizmów w projektach arduino: od łączenia po pisanie szkiców. Wybierając najprostszy model serwo (np. sg 90), możesz łatwo powtórzyć podane przykłady i stworzyć swoje pierwsze projekty, w których coś się porusza i zmienia. Mamy nadzieję, że ten artykuł Ci w tym pomoże.
Serwonapędy zwykle mają ograniczony kąt obrotu 180 stopni. W takim przypadku rozważ „zmodyfikowany” serwomechanizm o nieograniczonym kącie obrotu osi. 
TTX ze strony sprzedawcy
Rozmiar: wał napędowy 40 * 20 * 37,5 + 5 mm;
waga: 38g
długość drutu: 320mm
Prędkość: 0,19 s/60 stopni (4,8 V)
0,22 s/60 stopni (6 V)
prędkości są najprawdopodobniej pomieszane, przy 6 V serwo powinno być szybsze
moment obrotowy: 5kg. cm. przy (4,8 V)
5,5 kg cm przy (6 V)
napięcie: 4,8 V-6 V
Zestaw dostawy standard 
4 fotele bujane o różnych kształtach
4 tuleje, 4 gumowe amortyzatory i 4 śruby do montażu serwomechanizmu
a ze zdjęcia uciekła kolejna mała śruba do mocowania bujaka do szybu :)
Wygląd budzi zaufanie, w dotyku też nic, niewielkie ławice rzucania tylko w okolicy uszu montażowych, naklejka lekko krzywo (tak, tautologia!). Przewód jest miękki, złącze dobrze leży na pinach. 
Cóż, teraz otwarcie:
Kto nie wiedział, jak to działa: w przypadku silnika, płyty sterującej i rezystora zmiennego, którego położenie serwo określa kąt osi.
Skrzynia biegów w tym serwo jest plastikowa, zasób jest mniejszy niż metalowy i nie lubi dużych obciążeń. Tuleja osi centralnej jest wykonana z miedzi lub z niektórych jej stopów. Wał wyjściowy ma łożysko. Można dodać smary 
Część elektryczna 

Mózgi kontrolujące kierunek i prędkość obrotów, zmienny rezjuk i silnik elektryczny.
A teraz uwaga, "life hack", jak ze zwykłego serwa zrobić serwo stałoobrotowe 
W oryginale zmienna jest wbita swoją osią do wałka wyjściowego od wewnątrz serwa, w zmodyfikowanym wale podobno została odgryziona/odłamana na etapie montażu, rezystor ustawiony w pozycji środkowej tak aby wał nie obraca się w spoczynku. Jeśli pójdziesz dalej, możesz go całkowicie wyrzucić i zastąpić 2 identycznymi stałymi rezystorami, wygodnie jest umieścić coś smd-shnoe na płycie sterującej.
Całkowity:
serva jako serva, a nie przestrzeń, ale nie dobra konsumpcyjne,
można znaleźć taniej i z metalową skrzynią biegów
PS
Jak słusznie zauważyłem w komentarzach zupełnie zapomniałem wspomnieć jak serwo jest sterowane, serwo zasilane jest napięciem 5-6 woltów i sygnałem ppm przez trzeci przewód.
Najczęstsze opcje sterowania:
1) podłączamy zasilanie z jednej strony, z drugiej strony wyjście dla 3 „odbiorników” (serwery, silniki itp.) mocy i sygnału PPM, pokrętłem można regulować prędkość i kierunek obrotów serwomechanizmu
2) Sprzęt RC w odbiorniku wysyła ten sam sygnał ppm.
3) jeździć arduino
Wideo
pps
W wyniku „modyfikacji” serwo straciło sprzężenie zwrotne, mózg nie zna rzeczywistego położenia wałka i kierunku obrotów, rozważ ten moment, jeśli zamierzasz go kupić.
W tym artykule omówiono serwa: ich urządzenie, przeznaczenie, wskazówki dotyczące podłączania i sterowania, rodzaje serw i ich porównanie. Zacznijmy i zacznijmy od tego, czym jest serwo.
Pojęcie serwa
Serwonapęd najczęściej rozumiany jest jako mechanizm z silnikiem elektrycznym, który można poprosić o obrót pod zadany kąt i utrzymanie tej pozycji. Nie jest to jednak pełna definicja.
Mówiąc pełniej, serwonapęd to napęd ze sterowaniem poprzez ujemne sprzężenie zwrotne, co pozwala na dokładne sterowanie parametrami ruchu. Serwonapęd to dowolny rodzaj napędu mechanicznego, który zawiera czujnik (położenia, prędkości, siły itp.) oraz jednostkę sterującą napędem, która automatycznie utrzymuje niezbędne parametry na czujniku i urządzeniu zgodnie z daną wartością zewnętrzną.
Innymi słowy:
Serwonapęd otrzymuje jako wejście wartość parametru sterującego. Na przykład kąt obrotu.
Jednostka sterująca porównuje tę wartość z wartością na swoim czujniku.
Na podstawie wyniku porównania napęd wykonuje pewne czynności, takie jak obracanie, przyspieszanie lub zwalnianie, tak aby wartość z czujnika wewnętrznego była jak najbardziej zbliżona do wartości zewnętrznej zmiennej sterującej.
Najczęściej spotykane są serwa utrzymujące określony kąt oraz serwa utrzymujące określoną prędkość obrotową.
Poniżej pokazano typowe serwo hobby.
Jak rozmieszczone są serwa?
Serwo urządzenie
Serwonapędy składają się z kilku elementów.

Napęd - silnik elektryczny ze skrzynią biegów. Aby zamienić energię elektryczną w rotację mechaniczną, potrzebujesz silnik elektryczny. Jednak często prędkość obrotowa silnika jest zbyt duża do praktycznego zastosowania. Służy do spowolnienia prędkości reduktor: mechanizm kół zębatych, który przenosi i przekształca moment obrotowy.
Włączając i wyłączając silnik elektryczny możemy obracać wałek wyjściowy – ostatni bieg serwomechanizmu, do którego możemy przyczepić coś, czym chcemy sterować. Aby jednak pozycja była kontrolowana przez urządzenie, czujnik sprzężenia zwrotnego - koder, który zamieni kąt skrętu z powrotem na sygnał elektryczny. Często używa się do tego potencjometru. Po przekręceniu suwaka potencjometru jego rezystancja zmienia się proporcjonalnie do kąta obrotu. Dzięki temu można go wykorzystać do ustawienia aktualnej pozycji mechanizmu.
Oprócz silnika elektrycznego, skrzyni biegów i potencjometru serwonapęd posiada elektroniczne wypełnienie, które odpowiada za odbiór zewnętrznego parametru, odczytywanie wartości z potencjometru, porównywanie ich oraz włączanie/wyłączanie silnika. Jest odpowiedzialna za utrzymanie negatywnej opinii.
Do serwa prowadzą trzy przewody. Dwie z nich odpowiadają za zasilanie silnika, trzecia dostarcza sygnał sterujący, który służy do ustawienia pozycji urządzenia.
Zobaczmy teraz, jak sterować serwo zewnętrznie.
Sterowanie serwo. Interfejs sygnału sterującego
Aby wskazać żądaną pozycję serwomechanizmowi, sygnał sterujący musi zostać wysłany wzdłuż przeznaczonego do tego przewodu. Sygnał sterujący - impulsy o stałej częstotliwości i zmiennej szerokości.

Pozycja, jaką powinno zająć serwo, zależy od długości impulsów. Gdy sygnał wchodzi do obwodu sterującego, generator impulsów w nim wytwarza własny impuls, którego czas trwania jest określany za pomocą potencjometru. Inna część obwodu porównuje czas trwania dwóch impulsów. Jeśli czas trwania jest inny, silnik elektryczny jest włączony. Kierunek obrotu jest określany przez to, który z impulsów jest krótszy. Jeśli długości impulsów są równe, silnik elektryczny zatrzymuje się.
Najczęściej w serwach hobbystycznych impulsy są wytwarzane z częstotliwością 50 Hz. Oznacza to, że impuls jest emitowany i odbierany raz na 20 ms. Zazwyczaj czas trwania impulsu 1520 µs oznacza, że serwo powinno zająć pozycję środkową. Zwiększanie lub zmniejszanie długości impulsu spowoduje obrót serwa odpowiednio w prawo lub w lewo. W tym przypadku istnieją górne i dolne granice czasu trwania impulsu. W bibliotece Servo dla Arduino domyślne długości impulsów to 544 µs dla 0° i 2400 µs dla 180°.
Należy pamiętać, że na konkretnym urządzeniu ustawienia fabryczne mogą różnić się od standardowych. Niektóre serwa wykorzystują szerokość impulsu 760 µs. W tym przypadku środkowa pozycja odpowiada 760 µs, podobnie jak w konwencjonalnych serwonapędach średnia pozycja odpowiada 1520 µs.
Warto również zauważyć, że są to po prostu ogólnie przyjęte długości. Nawet w tym samym modelu serwomechanizmu może wystąpić błąd produkcyjny, który powoduje, że zakres roboczy długości impulsów może się nieznacznie różnić. W celu precyzyjnego działania, każdy konkretny serwo musi być skalibrowany: poprzez eksperymenty konieczne jest dobranie właściwego zakresu, który jest dla niego specyficzny.
Na co jeszcze warto zwrócić uwagę to zamieszanie terminologiczne. Często sposób sterowania serwami nazywa się PWM / PWM (modulacja szerokości impulsu) lub PPM (modulacja położenia impulsu). Tak nie jest, a korzystanie z tych metod może nawet spowodować uszkodzenie dysku. Prawidłowy termin to PDM (modulacja czasu trwania impulsu). W nim niezwykle ważna jest długość impulsów, a częstotliwość ich pojawiania się nie jest tak ważna. 50Hz to norma, ale serwo będzie działać poprawnie zarówno przy 40 jak i 60Hz. Jedyne, o czym należy pamiętać, to to, że przy silnym spadku częstotliwości może pracować w szarpnięciach i przy zmniejszonej mocy, a przy silnym wzroście częstotliwości (na przykład 100 Hz) może się przegrzewać i zawodzić.
Specyfikacje serwomechanizmu
Teraz zastanówmy się, czym są serwa i jakie mają cechy.
Moment obrotowy i prędkość skrętu
Najpierw porozmawiajmy o dwóch bardzo ważnych cechach serwa: moment obrotowy i o prędkość skręcania.
Moment siły lub moment obrotowy jest wektorową wielkością fizyczną równą iloczynowi wektora promienia poprowadzonego od osi obrotu do punktu przyłożenia siły przez wektor tej siły. Charakteryzuje obrotowe działanie siły na bryłę sztywną.

Mówiąc najprościej, ta charakterystyka pokazuje, jak duże obciążenie jest w stanie utrzymać serwo w spoczynku na dźwigni o określonej długości. Jeżeli moment obrotowy serwa wynosi 5 kg×cm, oznacza to, że serwo utrzyma dźwignię na ciężarku o długości 1 cm w pozycji poziomej, na której wolnym końcu zawieszone jest 5 kg. Lub, równoważnie, dźwignia o długości 5 cm, z której zwisa 1 kg.
Prędkość serwomechanizmu jest mierzona przez czas potrzebny na obrót ramienia serwomechanizmu o 60°. Charakterystyka 0.1s/60° oznacza, że serwo obraca się o 60° w 0.1s. Z tego łatwo obliczyć prędkość w bardziej znanej wartości, obrotach na minutę, ale tak się złożyło, że przy opisie serw najczęściej używa się takiej jednostki.
Warto zauważyć, że czasami trzeba dokonać kompromisu między tymi dwiema cechami, ponieważ jeśli chcemy niezawodnego, wytrzymałego serwa, musimy być przygotowani na to, że ta potężna platforma będzie się powoli obracać. A jeśli zależy nam na bardzo szybkim napędzie, to stosunkowo łatwo będzie go zbalansować. W przypadku korzystania z tego samego silnika równowaga zależy od konfiguracji kół zębatych w skrzyni biegów.
Oczywiście zawsze możemy wziąć roślinę, która zużywa więcej energii, o ile jej właściwości odpowiadają naszym potrzebom.
Współczynnik kształtu
Serwa różnią się wielkością. I chociaż nie ma oficjalnej klasyfikacji, producenci od dawna stosują się do kilku rozmiarów z ogólnie przyjętym układem elementów złącznych. Można je podzielić na:
mały
standard
Posiadają następujące charakterystyczne wymiary:
Są też serwa tzw. „specjalnego” o wymiarach, które nie mieszczą się w tej klasyfikacji, ale odsetek takich serwo jest bardzo mały.
Interfejs wewnętrzny
Serwonapędy są analogowe lub cyfrowe. Jakie są więc ich różnice, zalety i wady?
Zewnętrznie nie różnią się od siebie: silniki elektryczne, skrzynie biegów, potencjometry są takie same, różnią się tylko wewnętrzną elektroniką sterującą. Zamiast specjalnego analogowego układu serwo, na płytce widać cyfrowy odpowiednik z mikroprocesorem, który odbiera impulsy, analizuje je i steruje silnikiem. Tak więc w wersji fizycznej różnica polega tylko na sposobie przetwarzania impulsów i sterowaniu silnikiem.

Oba typy serwomechanizmów pobierają te same impulsy sterujące. Serwo analogowe następnie decyduje, czy zmienić pozycję i w razie potrzeby wysyła sygnał do silnika. Zwykle dzieje się to przy częstotliwości 50 Hz. W ten sposób otrzymujemy 20 ms - minimalny czas reakcji. W tym momencie każdy wpływ zewnętrzny może zmienić położenie serwomechanizmu. Ale to nie jedyny problem. W spoczynku do silnika elektrycznego nie jest podawane żadne napięcie, w przypadku niewielkiego odchylenia od równowagi do silnika elektrycznego podawany jest krótki sygnał o małej mocy. Im większe odchylenie, tym silniejszy sygnał. Tak więc przy małych odchyleniach serwo nie będzie w stanie szybko obrócić silnika lub wytworzyć dużego momentu obrotowego. „Martwe strefy” tworzą się w czasie i odległości.
Problemy te można rozwiązać poprzez zwiększenie częstotliwości odbioru, przetwarzanie sygnału i sterowanie silnikiem. Serwa cyfrowe wykorzystują specjalny procesor, który odbiera impulsy sterujące, przetwarza je i wysyła sygnały do silnika z częstotliwością 200 Hz lub wyższą. Okazuje się, że serwo cyfrowe jest w stanie szybciej reagować na wpływy zewnętrzne, szybciej rozwijać niezbędną prędkość i moment obrotowy, co oznacza, że lepiej utrzymać daną pozycję, co jest dobre. Oczywiście jednocześnie zużywa więcej energii elektrycznej. Ponadto serwa cyfrowe są trudniejsze w produkcji, a co za tym idzie są zauważalnie droższe. Właściwie te dwie wady to wszystkie wady, które mają serwa cyfrowe. Pod względem technicznym bezwarunkowo pokonują serwa analogowe.
Materiały przekładni
Koła zębate do serw są wykonane z różnych materiałów: plastiku, węgla, metalu. Wszystkie są szeroko stosowane, wybór zależy od konkretnego zadania i wymaganych cech instalacji.

Plastikowe, najczęściej nylonowe koła zębate są bardzo lekkie, nie ulegają zużyciu i najczęściej występują w serwonapędach. Nie wytrzymują dużych obciążeń, ale jeśli oczekuje się, że obciążenia będą małe, najlepszym wyborem są przekładnie nylonowe.
Koła zębate karbonowe są trwalsze, praktycznie nie zużywają się i są kilkakrotnie mocniejsze od nylonowych. Główną wadą jest wysoki koszt.
Metalowe koła zębate są najcięższe, ale wytrzymują maksymalne obciążenia. Szybko się zużywają, więc prawie co sezon trzeba zmieniać biegi. Przekładnie tytanowe są faworytem wśród przekładni metalowych, zarówno pod względem parametrów technicznych, jak i ceny. Niestety będą cię sporo kosztować.
Silniki szczotkowane i bezszczotkowe
Istnieją trzy typy serwosilników: konwencjonalny silnik rdzeniowy, silnik bezrdzeniowy i silnik bezszczotkowy.

Konwencjonalny silnik z rdzeniem (po prawej) ma gęsty żelazny wirnik z uzwojeniami drutu i magnesami wokół niego. Wirnik ma wiele sekcji, więc gdy silnik się kręci, wirnik powoduje lekkie wibracje silnika, gdy sekcje przechodzą przez magnesy, co powoduje, że serwomechanizm wibruje i jest mniej dokładny niż serwomechanizm bez rdzenia. Silnik z pustym wirnikiem (po lewej) ma pojedynczy rdzeń magnetyczny z owiniętym wokół magnesu cylindrem lub dzwonem. Konstrukcja bezrdzeniowa jest lżejsza i nie zawiera sekcji, co zapewnia szybszą reakcję i płynną, wolną od wibracji pracę. Silniki te są droższe, ale zapewniają wyższy poziom kontroli, momentu obrotowego i prędkości niż silniki standardowe.

Serwonapędy z silnikiem bezszczotkowym pojawiły się stosunkowo niedawno. Zalety są takie same jak w przypadku innych silników bezszczotkowych: brak szczotek, co oznacza, że nie wytwarzają oporów obrotowych i nie zużywają się, prędkość i moment obrotowy są wyższe przy poborze prądu równym silnikom kolektorowym. Serwa z silnikami bezszczotkowymi są najdroższymi serwomechanizmami, ale oferują lepszą wydajność niż serwa z innymi typami silników.
Łączenie z Arduino
Wiele serw można podłączyć bezpośrednio do Arduino. Aby to zrobić, pochodzą z kabla z trzech przewodów:
czerwony - jedzenie; łączy się z pinem 5V lub bezpośrednio z zasilaczem;
brązowy lub czarny - ziemia
żółty lub biały - sygnał; łączy się z wyjściem cyfrowym Arduino.
Do połączenia z Arduino wygodnie będzie użyć płytki ekspandera portów, takiej jak Troyka Shield. Chociaż za pomocą kilku dodatkowych przewodów można podłączyć serwo przez płytkę stykową lub bezpośrednio do pinów Arduino.
Możliwe jest samodzielne generowanie impulsów sterujących, ale jest to tak powszechne zadanie, że istnieje standardowa biblioteka Servo, aby to uprościć.
Ograniczenie żywności
Typowe serwo hobby pobiera podczas pracy ponad 100 mA. Jednocześnie Arduino jest w stanie dostarczyć do 500 mA. Dlatego jeśli potrzebujesz użyć w projekcie potężnego serwomechanizmu, warto pomyśleć o wyizolowaniu go w obwód z dodatkową mocą.
Rozważ przykład podłączenia serwomechanizmu 12V: 
Ograniczenie liczby podłączonych serw
Na większości płyt Arduino biblioteka Servo obsługuje maksymalnie 12 serw, na Arduino Mega liczba ta wzrasta do 48. Istnieje mały efekt uboczny korzystania z tej biblioteki: jeśli nie pracujesz z Arduino Mega, niemożliwe staje się użyj funkcji analogWrite() na 9 i 10 pinach, niezależnie od tego, czy serwa są podłączone do tych pinów, czy nie. Do Arduino Mega można podłączyć do 12 serw bez przerywania funkcji PWM/PWM, jeśli użyjemy więcej serw nie będziemy mogli użyć analogWrite() na pinach 11 i 12.
Funkcjonalność biblioteki serwo
Biblioteka Servo umożliwia programowe sterowanie serwami. W tym celu tworzona jest zmienna typu Servo. Zarządzanie realizowane jest przez następujące funkcje:
attach() — dołącza zmienną do określonego pinu. Istnieją dwie możliwe składnie tej funkcji: servo.attach(pin) i servo.attach(pin, min, max) . W tym przypadku pin to numer pinu, do którego podłączone jest serwo, min i max to długości impulsów w mikrosekundach, które odpowiadają za kąty obrotu 0° i 180°. Domyślnie są one ustawione odpowiednio na 544 µs i 2400 µs.
write() - nakazuje serwo zaakceptowanie jakiejś wartości parametru. Składnia to: servo.write(angle) gdzie kąt to kąt, o który serwo powinno się obracać.
writeMicroseconds() - wydaje polecenie wysłania impulsu o określonej długości do serwomechanizmu, jest niskopoziomowym odpowiednikiem poprzedniego polecenia. Składnia to: servo.writeMicroseconds(uS) gdzie uS to długość impulsu w mikrosekundach.
read() - odczytuje bieżącą wartość kąta, pod jakim znajduje się serwo. Składnia jest następująca: servo.read() zwraca wartość całkowitą z przedziału od 0 do 180.
Attach() — Sprawdza, czy zmienna została dołączona do określonego pinu. Składnia jest następująca: servo.attached() zwraca wartość logiczną true, jeśli zmienna została podłączona do dowolnego pinu, lub false w przeciwnym razie.
detach() - wykonuje odwrotną akcję attach() , czyli odłącza zmienną od pinu, do którego została przypisana. Składnia to: servo.detach() .
Wszystkie metody biblioteki Servo2 są takie same jak metody Servo.
Przykład wykorzystania biblioteki Servo
Zamiast konkluzji
Serwonapędy są inne, niektóre są lepsze - inne są tańsze, niektóre są bardziej niezawodne - inne są dokładniejsze. A zanim kupisz serwo, pamiętaj, że może nie mieć najlepszych właściwości, o ile jest odpowiedni dla twojego projektu. Powodzenia w twoich staraniach!
Najprostsze roboty są dwukołowe lub czterokołowe. Taki robot może opierać się na podwoziu z samochodu sterowanego radiowo, ale nie każdy może go mieć pod ręką lub szkoda go schrzanić. Można też samemu wykonać podwozie, ale umieszczenie kół bezpośrednio na silniku nie jest zbyt dobrym rozwiązaniem, silnik musi być naładowany, aby zwolnić, do tego potrzebna jest skrzynia biegów. Uzyskanie gotowego podwozia lub skrzyni biegów lub silnika ze skrzynią biegów okazało się nie tak łatwym zadaniem, w przeciwieństwie do serw. Prawie każdy serwonapęd można łatwo przekształcić w silnik ze skrzynią biegów.
Koła można przykleić bezpośrednio do fotela bujanego takiego silnika, a korpus serwa jest wygodny w montażu.
UWAGA! Konstrukcja innych serw może się różnić, dlatego niniejsza instrukcja będzie tylko jej częścią.
Za podstawę przyjęto najprostsze i najtańsze serwo:

Najpierw go zdemontujmy.

Najpierw usuniemy zbędną elektronikę, odgryziemy sterownik, będziemy sterować bezpośrednio silnikiem. Następnie zacznijmy modyfikować mechanikę, zdejmijmy pierwszy bieg z zewnętrznym wałem i wyjmijmy z niego ogranicznik skoku.



Wyciągamy rezystor i wygryzamy ogranicznik znajdujący się na jego korpusie.

Zbieramy całą mechanikę z powrotem i sprawdzamy, czy wszystko się udaje.
Następnym krokiem jest przylutowanie przewodu do silnika.

Poprzednie serwo montujemy w nowy silnik ze skrzynią biegów.
Wszystko gotowe, jeśli nie popełniłeś żadnych błędów, możesz cieszyć się pracą.
Do demontażu naszego serwa potrzebujemy śrubokręta. Dlatego Rozbieram bardzo małe serwo, potem potrzebuję odpowiedniego śrubokręta. Osobiście używam śrubokrętów z jakiegoś taniego chińskiego zestawu. Kupiłem go w kiosku w przejściu podziemnym za około 5 USD, więc nie jest bardzo drogi.
Aby otworzyć serwo, wystarczy odkręcić tylko cztery śruby. Znajdują się na dolnej pokrywie. Odkręcić:

Po zdjęciu pokrywy widać jednostkę sterującą. Nie będę się wdawał w szczegóły, i tak go stąd usunę. Widać również silnik, do którego prowadzą dwa przewody.

Na górze znajduje się również osłona, po której zdjęciu widać zębatki gearboxa. Warto zauważyć, że dwa z nich są zamocowane na potencjometrze – jest to dość ważne, ponieważ aby gearbox nadal spełniał swoją funkcję, będziemy musieli faktycznie zepsuć potencjometr – użyjemy go po prostu jako oś do koła zębate.

Właściwie trzeba zdjąć wszystkie koła zębate z serwonapędu i odłożyć je na chwilę. Potencjometr (swoją drogą to też rezystor zmienny) wyjmujemy z obudowy, delikatnie wpychając go od spodu serwomechanizmu śrubokrętem.

To jest moment, z którego nie ma powrotu. Oczywiście zawsze będzie można wszystko odlutować, ale jest to już trudniejsze. Więc - odgryź potencjometr.

Następnie tą samą metodą rozdzielamy płytkę sterującą przewodami zasilającymi i sygnałowymi.

Następnie odgryzamy przewody od silnika. Tutaj uważaj i nie odgryzaj styków z samego silnika - jeśli nie masz pewności, lepiej zostawić przewód z marginesem. Następnie można go przylutować. Odgryzam przewód do samego kontaktu.


Zróbmy spis.

Wydaje się, że wszystko jest na swoim miejscu. Teraz bierzemy do ręki nasz potencjometr.

Faktem jest, że teraz również obraca się tylko pod pewnym kątem. A ponieważ jest to oś i jest do niej przymocowana największa zębatka, na której faktycznie zamontujemy później koło, musimy zadbać o to, aby stale się obracało. Wyjmujemy dwie metalowe płytki, które temu zapobiegają. Otrzymujemy:

Mam nadzieję, że zdjęcia jasno pokazują, co zrobiłem. Wyrwałem go małymi szczypcami, ponieważ nie było pod ręką nic bardziej odpowiedniego.
Teraz musisz wyciąć ogranicznik na samym biegu. Wygląda jak półka od spodu koła zębatego. Łatwo go znaleźć, wygląda to tak.

Reżem.

I właściwie po tym można przystąpić do montażu gearboxa z powrotem w obudowie. Wstawiamy z powrotem oś, którą wykonaliśmy wcześniej z potencjometru.

Następnie kolejno biegi zaczynając od najmniejszego. Zachowaj ostrożność przy wkładaniu ostatniego biegu - jest on specjalnie przymocowany do osi dawnego potencjometru, ponieważ czubek osi wykonany jest w kształcie litery D. Konieczne jest, aby ten występ dostał się do wgłębienia w kole zębatym. Okazuje się coś podobnego do poniższego obrazu.

Górną pokrywę nakładamy na gearbox, aby nie rozpadła się w trakcie dalszej pracy.

Cóż, niewiele zostało. Bierzemy przewód ze złączem, które wcześniej odgryzliśmy z płytki i oddzielamy w nim okablowanie. Nie należy oddzielać się z dużej odległości, wystarczy jeden centymetr.

Czyścimy dwa z nich (w zasadzie każdy, ale ja użyłem czerwonego i zielonego). Wystarczy odciąć około 3mm izolacji. Dla naszych celów - ponad.

Po prostu zginamy pozostały nieodizolowany drut, aby nam nie przeszkadzał.

Przejdźmy do gorących. Czas rozgrzać lutownicę. W czasie, gdy lutownica jest nagrzewana, sprawiłem, że serwonapęd jest wygodniejszy w uchwycie.


Przede wszystkim będziemy musieli usunąć resztki starego lutowia, które pozostały na stykach silnika. Robię to pompą rozlutowującą, podgrzewając kontakt z lutownicą do takiego stanu, że lut się topi. Najważniejsze, żeby nie przesadzić - tylna pokrywa silnika jest nadal plastikowa i nie lubi się długo rozgrzewać. Proces wygląda mniej więcej tak:


Rozumiem, że jest to możliwe i mało zauważalne, co zrobiłem, ale praktycznie nie było lutu na stykach, co starałem się osiągnąć.

Są cudowne artykuły na temat lutowania w DI HALT "a. Generalnie jest geniuszem, wydaje mi się. Link do jego bloga, jest wiele rzeczy poza lutowaniem, w rzeczywistości po prostu poszukaj.
Krótko mówiąc, aby wykonać dobre lutowanie, należy zawsze na początku pozbyć się starego lutu.
Pozostaje przylutować dwa przewody. Kto zna się na lutowaniu - poradzi sobie w 5 sekund. Kto tak jak ja, po raz drugi w życiu, normalnie zajął się lutownicą, zajmie to trochę więcej czasu, ale jednak - to bardzo proste, każdy może to zrobić.
Podczas lutowania używam topnika, który co prawda chwilami ułatwia pracę i dużo łatwiej jest zapewnić jakość lutowania. Osobiście za radą mnie ponownie DI HALT” i na jego blogu już udało mi się zakochać w LTI-120. Mam go w tak modnym słoiczku od razu z pędzelkiem.

Dokręcamy cztery śruby.

To wszystko, przeróbka serwa się skończyła. Po ponownym zamocowaniu serwomechanizmu wygodniej i mocniej w uchwycie można przystąpić do testów.

Tym razem nie będę wyrafinowany ze sterownikiem, ale po prostu podam napięcie z zasilacza do 5V na przewody zielony i czerwony. Uwaga, wideo pokazuje dość głośny dźwięk z pracy napędu.
Jak widać, teraz nic nie stoi na przeszkodzie, aby nasze serwo obracało się bez zatrzymywania. Dźwięk emitowany przez napęd nie jest zbyt cichy, ale w zasadzie jest znośny. To chyba wszystko na dziś.


