Principes de construction de complexes et de systèmes hydroacoustiques actifs: Questions: 1) Principes de construction de gaz actif 2) Principes de construction d'un gaz de communication et d'identification 3) Principes de construction de miniscères de gaz Objectif cible: 1. Étudier les principes de la construction de gaz actif 2. Examinez les principes de travail sur les régimes structurels de Gus II actives. Objectif éducatif 1. Activation des activités de cadets cognitifs. 2. Formation des cadets des compétences méthodiques de commande (KMN) et des compétences éducatives (NVR). une
 Littérature: 1. Normes d'État de l'URSS et de la Fédération de Russie. GOST 2. Système unifié de documentation de conception (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Machines hydroacoustiques de navire: conditions et problèmes réels. - Saint-Pétersbourg. : Science, 2004. - 410 p. 177 il. 4. I. V. SOLOVYOV, G. N. KORLOLKOV, A. A. Barangenko et autres. SEA Radio Electronics: Annuaire. - Saint-Pétersbourg. : Polytechnique, 2003. - 246 p. : Il. 5. G. I. Kazantev, G. G. Kotov, V. B. Lokshin et al. Hydroacience du didacticiel. - M Militaire. Éditer. 1993. 230 s. Il. 2.
Littérature: 1. Normes d'État de l'URSS et de la Fédération de Russie. GOST 2. Système unifié de documentation de conception (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Machines hydroacoustiques de navire: conditions et problèmes réels. - Saint-Pétersbourg. : Science, 2004. - 410 p. 177 il. 4. I. V. SOLOVYOV, G. N. KORLOLKOV, A. A. Barangenko et autres. SEA Radio Electronics: Annuaire. - Saint-Pétersbourg. : Polytechnique, 2003. - 246 p. : Il. 5. G. I. Kazantev, G. G. Kotov, V. B. Lokshin et al. Hydroacience du didacticiel. - M Militaire. Éditer. 1993. 230 s. Il. 2.
 Selon la méthode d'obtention d'informations hydroacoustiques (selon la méthode d'utilisation de l'énergie), les systèmes hydroacoustiques sont divisés en systèmes hydroacoustiques actifs A) Systèmes hydroacoustiques passives Système hydroacoustique actif (moyen) - un dispositif qui forme et émet des signaux hydroacoustiques dans le aquatique L'environnement et les frontières de sa partition acceptent des signaux réfléchis ou émis par des objets sous-marins et de surface. Les termes équivalents du système hydroacoustique actif sont des hydrolections actives, de l'élimination de l'écho, de l'emplacement d'écho ou de l'hydrolection).
Selon la méthode d'obtention d'informations hydroacoustiques (selon la méthode d'utilisation de l'énergie), les systèmes hydroacoustiques sont divisés en systèmes hydroacoustiques actifs A) Systèmes hydroacoustiques passives Système hydroacoustique actif (moyen) - un dispositif qui forme et émet des signaux hydroacoustiques dans le aquatique L'environnement et les frontières de sa partition acceptent des signaux réfléchis ou émis par des objets sous-marins et de surface. Les termes équivalents du système hydroacoustique actif sont des hydrolections actives, de l'élimination de l'écho, de l'emplacement d'écho ou de l'hydrolection).
 Hydrogène actif - Procédé de détection et de détermination des propriétés des objets sous-marins basés sur le rayonnement de signaux hydroacoustiques en milieu aqueux, ainsi que la réception et la transformation des signaux d'écho, qui découlent de la réflexion (ou de la diffusion) vagues acoustiques des objets sous-marins. Les moyens hydroacoustiques (systèmes) fournissant des hydrolyts actifs sont appelés hydrocolocateurs, stations d'hydrogène (GLS) ou chemins d'hydrolérie (CH), chemins d'élimination d'écho (EP) et mesures de distance (ID) pour le gaz. Habituellement sous le GLAS Comprendre les systèmes destinés à détecter et à mesurer la distance à PL et à d'autres objets sous-marins importants
Hydrogène actif - Procédé de détection et de détermination des propriétés des objets sous-marins basés sur le rayonnement de signaux hydroacoustiques en milieu aqueux, ainsi que la réception et la transformation des signaux d'écho, qui découlent de la réflexion (ou de la diffusion) vagues acoustiques des objets sous-marins. Les moyens hydroacoustiques (systèmes) fournissant des hydrolyts actifs sont appelés hydrocolocateurs, stations d'hydrogène (GLS) ou chemins d'hydrolérie (CH), chemins d'élimination d'écho (EP) et mesures de distance (ID) pour le gaz. Habituellement sous le GLAS Comprendre les systèmes destinés à détecter et à mesurer la distance à PL et à d'autres objets sous-marins importants

 Le régime reflétant le principe de détection et de détermination de la distance à la cible de la réception de la radiation de signal G / A reflétée G / A signal D \u003d CT / 2 réflexion G / A signal
Le régime reflétant le principe de détection et de détermination de la distance à la cible de la réception de la radiation de signal G / A reflétée G / A signal D \u003d CT / 2 réflexion G / A signal
 R Transmission de la tractueuse (générateur) A D Système de démarrage du système Système système Système système Système de synchronisation Pulse B dans le système d'alimentation A B C D E E CARACTÉRISTIQUES CARACTÉRISTIQUES CARACTÉRISTIQUES CARACTÉRISTIQUES ANTENNA (DISPOSITIF DE RÉCEPTION) E Distance D \u003d (C · T) / 2 Antenne acoustique de réception
R Transmission de la tractueuse (générateur) A D Système de démarrage du système Système système Système système Système de synchronisation Pulse B dans le système d'alimentation A B C D E E CARACTÉRISTIQUES CARACTÉRISTIQUES CARACTÉRISTIQUES CARACTÉRISTIQUES ANTENNA (DISPOSITIF DE RÉCEPTION) E Distance D \u003d (C · T) / 2 Antenne acoustique de réception

 L'antenne acoustique (AA) est conçue pour convertir l'énergie électrique en acoustique et en arrière. Les périphériques d'entrée sont utilisés pour pré-améliorer les signaux reçus, ainsi que pour commuter l'antenne acoustique avec générateur et dispositifs de réception. Le dispositif générateur génère des impulsions de rayonnement avec des paramètres spécifiés. Les canaux de chemin de détection de réception résolvent des problèmes de détection d'objets sous-marins et d'une définition approximative de leurs coordonnées. Coordonner les clarifications Les canaux sont conçus pour déterminer avec précision les coordonnées des objets sous-marins, suivies de les émettre au système de contrôle de l'arme.
L'antenne acoustique (AA) est conçue pour convertir l'énergie électrique en acoustique et en arrière. Les périphériques d'entrée sont utilisés pour pré-améliorer les signaux reçus, ainsi que pour commuter l'antenne acoustique avec générateur et dispositifs de réception. Le dispositif générateur génère des impulsions de rayonnement avec des paramètres spécifiés. Les canaux de chemin de détection de réception résolvent des problèmes de détection d'objets sous-marins et d'une définition approximative de leurs coordonnées. Coordonner les clarifications Les canaux sont conçus pour déterminer avec précision les coordonnées des objets sous-marins, suivies de les émettre au système de contrôle de l'arme.
 Les systèmes de prise en charge semi-automatique des objectifs permettent de réaliser un support pour des cibles en mode semi-automatique avec une suppression automatique des coordonnées actuelles. Le canal d'écoute permet d'écouter les signaux de rumeurs reçus pour la classification du contact hydroacoustique avec l'objectif. Le système d'affichage est un périphérique de sortie et est nécessaire à l'affichage visuel des informations reçues et de supprimer les données cible. Le système de gestion et de synchronisation est un lien entre tous les appareils et les systèmes GLS.
Les systèmes de prise en charge semi-automatique des objectifs permettent de réaliser un support pour des cibles en mode semi-automatique avec une suppression automatique des coordonnées actuelles. Le canal d'écoute permet d'écouter les signaux de rumeurs reçus pour la classification du contact hydroacoustique avec l'objectif. Le système d'affichage est un périphérique de sortie et est nécessaire à l'affichage visuel des informations reçues et de supprimer les données cible. Le système de gestion et de synchronisation est un lien entre tous les appareils et les systèmes GLS.
 Le dispositif de formation intégré (VUCU) est destiné à élaborer des compétences de l'opérateur par la cible, ainsi que des compétences sur la gestion des GLS dans divers modes. Système de contrôle automatique intégré (ACC) vous permet de contrôler la principale spécifications techniques GLS, identifier ses défauts. Les GLS sont inclus dans l'opération en fournissant les tensions d'alimentation à tous les périphériques, car la station dispose d'un bouclier de distribution sur lequel le système de commande du système d'alimentation est affiché.
Le dispositif de formation intégré (VUCU) est destiné à élaborer des compétences de l'opérateur par la cible, ainsi que des compétences sur la gestion des GLS dans divers modes. Système de contrôle automatique intégré (ACC) vous permet de contrôler la principale spécifications techniques GLS, identifier ses défauts. Les GLS sont inclus dans l'opération en fournissant les tensions d'alimentation à tous les périphériques, car la station dispose d'un bouclier de distribution sur lequel le système de commande du système d'alimentation est affiché.
 Selon la méthode de révision de la zone de l'eau de l'examen circulaire (KO) 360 Examen du secteur (CO) 25 0 Révision de la réunion 0 360 Avis sectoriel Secteur (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0
Selon la méthode de révision de la zone de l'eau de l'examen circulaire (KO) 360 Examen du secteur (CO) 25 0 Révision de la réunion 0 360 Avis sectoriel Secteur (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0


 Figure. 4. Vue de l'indicateur avec un riz à balayage en spirale. 9. Affiche les marques des cibles sur l'indicateur avec un riz à balayage de ligne. 5. Vue de l'indicateur avec un riz à balayage de ligne. 10. Vue de l'indicateur avec des cloches et des distances
Figure. 4. Vue de l'indicateur avec un riz à balayage en spirale. 9. Affiche les marques des cibles sur l'indicateur avec un riz à balayage de ligne. 5. Vue de l'indicateur avec un riz à balayage de ligne. 10. Vue de l'indicateur avec des cloches et des distances



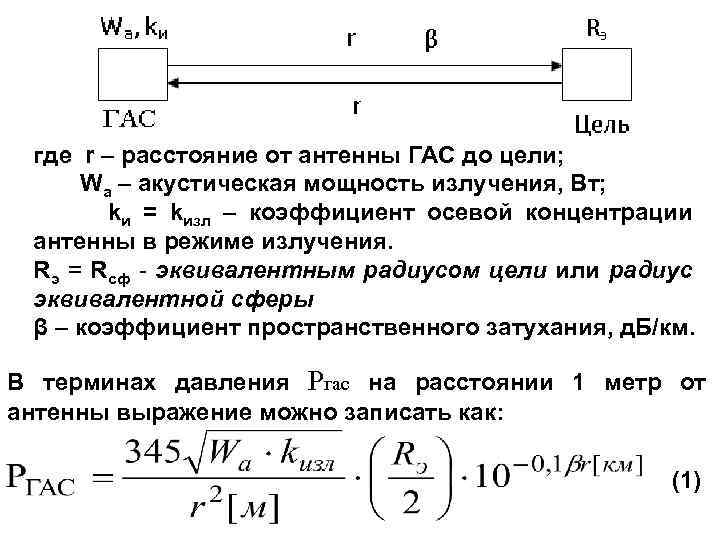 où r est la distance de l'antenne de gaz à la cible; Wa - puissance acoustique rayonnement, w; Ki \u003d kizl - le coefficient de concentration axial de l'antenne en mode radiation. Re \u003d RSF - rayon cible équivalent ou rayon de la sphère équivalente β est le coefficient d'atténuation spatiale, d. B / km. En termes de pression des RGA à une distance de 1 mètre de l'antenne, l'expression peut être écrite comme suit: (1)
où r est la distance de l'antenne de gaz à la cible; Wa - puissance acoustique rayonnement, w; Ki \u003d kizl - le coefficient de concentration axial de l'antenne en mode radiation. Re \u003d RSF - rayon cible équivalent ou rayon de la sphère équivalente β est le coefficient d'atténuation spatiale, d. B / km. En termes de pression des RGA à une distance de 1 mètre de l'antenne, l'expression peut être écrite comme suit: (1)
 Nous définissons le niveau d'écho signal de la cible par rapport au niveau zéro P 0, en utilisant la relation (1) et le prologate avec un algorithme décimal: nous introduisons la notation: - Le niveau du signal d'écho au point de la arrangement de l'antenne à gaz, dans la D. B; - niveau de rayonnement, dans d. B; - Ceci est la valeur exprimée dans la D. B et caractérisant la réflectivité de l'objet.
Nous définissons le niveau d'écho signal de la cible par rapport au niveau zéro P 0, en utilisant la relation (1) et le prologate avec un algorithme décimal: nous introduisons la notation: - Le niveau du signal d'écho au point de la arrangement de l'antenne à gaz, dans la D. B; - niveau de rayonnement, dans d. B; - Ceci est la valeur exprimée dans la D. B et caractérisant la réflectivité de l'objet.
 PR - Les pertes standard de la propagation, en ré. B, en tenant compte de l'affaiblissement du signal lorsqu'il se propage de l'antenne du gaz à la cible et au dos en tenant compte de la loi sphérique de la distribution. Compte tenu des désignations introduites, l'expression prend le formulaire: NGAS \u003d UI + CC - 2 PR (2) de formule (2) est utilisée pour estimer le niveau du signal d'écho de la cible au point de réception d'une limite homogène sans limites. environnement sans interférence.
PR - Les pertes standard de la propagation, en ré. B, en tenant compte de l'affaiblissement du signal lorsqu'il se propage de l'antenne du gaz à la cible et au dos en tenant compte de la loi sphérique de la distribution. Compte tenu des désignations introduites, l'expression prend le formulaire: NGAS \u003d UI + CC - 2 PR (2) de formule (2) est utilisée pour estimer le niveau du signal d'écho de la cible au point de réception d'une limite homogène sans limites. environnement sans interférence.
 Compte tenu du traitement du signal utilitaire de RGAS \u003d PC et des interférences avec RP dans le gaz et envisagez le coefficient de reconnaissance Δ, vous pouvez enregistrer l'expression suivante de la gamme RGAS \u003d PC \u003d Δ RP Plage d'énergie du mode CH (EE): \u003d où k est le coefficient de concentration axial de l'antenne; ΔF - bande de fréquence (portée) du chemin d'accueil de gaz, Hz; F 0 est la fréquence moyenne de la gamme, à. Hz; β \u003d 0, 036 F 03/2 [à. Hz] - Coefficient d'atténuation spatiale, d. B / km.
Compte tenu du traitement du signal utilitaire de RGAS \u003d PC et des interférences avec RP dans le gaz et envisagez le coefficient de reconnaissance Δ, vous pouvez enregistrer l'expression suivante de la gamme RGAS \u003d PC \u003d Δ RP Plage d'énergie du mode CH (EE): \u003d où k est le coefficient de concentration axial de l'antenne; ΔF - bande de fréquence (portée) du chemin d'accueil de gaz, Hz; F 0 est la fréquence moyenne de la gamme, à. Hz; β \u003d 0, 036 F 03/2 [à. Hz] - Coefficient d'atténuation spatiale, d. B / km.
 Gaz sur l'antenne PN UI UI PR Sk up POP OND ENGLIC Le droit locatif de la charge de CHA (EP) sous forme symbolique peut être enregistré (en tenant compte du signe "-") comme: EP \u003d - (UI + SC - UP - PO + PN) \u003d 2 PR EP \u003d UE (niveau d'interférence) \u003d
Gaz sur l'antenne PN UI UI PR Sk up POP OND ENGLIC Le droit locatif de la charge de CHA (EP) sous forme symbolique peut être enregistré (en tenant compte du signe "-") comme: EP \u003d - (UI + SC - UP - PO + PN) \u003d 2 PR EP \u003d UE (niveau d'interférence) \u003d
 Logiciel (seuil de détection) \u003d lun (indicateur de direction) \u003d gaz actif: - Mesures de distance de gaz - Communication de gaz - Gaz IMective - Ministance du gaz - Gaz de Drets Torgettes - Gaz d'alimentation Développeuse et gaz supplémentaire - Gaz d'éclairage et développement - Hydroacoustique Lags - Examen du côté gaz
Logiciel (seuil de détection) \u003d lun (indicateur de direction) \u003d gaz actif: - Mesures de distance de gaz - Communication de gaz - Gaz IMective - Ministance du gaz - Gaz de Drets Torgettes - Gaz d'alimentation Développeuse et gaz supplémentaire - Gaz d'éclairage et développement - Hydroacoustique Lags - Examen du côté gaz

 L'armement hydroacoustique de la NK se compose de: Øgak MGK-335 "Platinum" - un complexe hydroacoustique de détection, de ciblage et de communication; Øgak MGK-345 "Bronze" - Un complexe hydroacoustique de détection, de ciblage et de communication; Øgak MGK-355 "Polynom" est un complexe hydroacoustique de détection du PL et de la délivrance de la désignation cible des bras anti-sous-marins; Ø Tags MG-332 "argun", gaz mg-332 T "argun-t" - un poste hydroacoustique de détection et de ciblage pour les navires antiques; Ø tags mg-329 "oka", gaz mg-329 m "oka-m" - une station hydroacoustique réduite; Ø Tags MG-339 "Semon" ou Gaz MG-339 T "Schend-T" - Un poste de détection hydroacoustique, détermination de coordonnées, de communication et d'identification;
L'armement hydroacoustique de la NK se compose de: Øgak MGK-335 "Platinum" - un complexe hydroacoustique de détection, de ciblage et de communication; Øgak MGK-345 "Bronze" - Un complexe hydroacoustique de détection, de ciblage et de communication; Øgak MGK-355 "Polynom" est un complexe hydroacoustique de détection du PL et de la délivrance de la désignation cible des bras anti-sous-marins; Ø Tags MG-332 "argun", gaz mg-332 T "argun-t" - un poste hydroacoustique de détection et de ciblage pour les navires antiques; Ø tags mg-329 "oka", gaz mg-329 m "oka-m" - une station hydroacoustique réduite; Ø Tags MG-339 "Semon" ou Gaz MG-339 T "Schend-T" - Un poste de détection hydroacoustique, détermination de coordonnées, de communication et d'identification;
 Ø Tags MG-79 ou Gaz MG-89 "Sula" - une station hydroacoué de détection d'ancrage et de mines de fond; Ø Tags MG-7 "Bracelet" et gaz MG-737 "Amulette-3" - Un poste hydroacoustique de découverte des forces et des moyens de sabotage sous-marins; Øgas mg-26 "hôte" ou gaz MG-45 "Backgammon" - Équipement hydroacoustique et d'identification. Ø Tags KMG-12 "Cassandra" - L'instrument de classification des objectifs pour les stations hydroacoustiques des navires de surface lorsqu'ils travaillent en mode actif. Ø Tags MG-409 C est un système de détection passive de Buto hydroacoustique. Ø Tags "altyn" - équipement pour mesurer la distribution verticale de la vitesse sonore dans l'eau du navire de surface; Øgas mi-110 km - L'instrument de détection de la trace de retenue de l'APL.
Ø Tags MG-79 ou Gaz MG-89 "Sula" - une station hydroacoué de détection d'ancrage et de mines de fond; Ø Tags MG-7 "Bracelet" et gaz MG-737 "Amulette-3" - Un poste hydroacoustique de découverte des forces et des moyens de sabotage sous-marins; Øgas mg-26 "hôte" ou gaz MG-45 "Backgammon" - Équipement hydroacoustique et d'identification. Ø Tags KMG-12 "Cassandra" - L'instrument de classification des objectifs pour les stations hydroacoustiques des navires de surface lorsqu'ils travaillent en mode actif. Ø Tags MG-409 C est un système de détection passive de Buto hydroacoustique. Ø Tags "altyn" - équipement pour mesurer la distribution verticale de la vitesse sonore dans l'eau du navire de surface; Øgas mi-110 km - L'instrument de détection de la trace de retenue de l'APL.
 Figure. 1. Projet Rocket Cruiser 1164 en service du projet 1164 Armes hydroacoustiques: q gak mgk-335 "platine"; Q Gas MG-7 "Bracelet" - 2 ensembles; Q Gas MG-737 "amulette-3"; Q Gas KMG-12 "Cassandra". Il y a ce qui suit
Figure. 1. Projet Rocket Cruiser 1164 en service du projet 1164 Armes hydroacoustiques: q gak mgk-335 "platine"; Q Gas MG-7 "Bracelet" - 2 ensembles; Q Gas MG-737 "amulette-3"; Q Gas KMG-12 "Cassandra". Il y a ce qui suit
 Figure. 2. Grand navire anti-sous-marin du projet 1155 (1155. 1) L'armement hydroacoustique suivant est en service avec le projet 1155: GAK MGK-335 "Platinum"; Gaz MG-7 "Bracelet" - 2 ensembles; Gus "altyn"; Gaz mi-110 km. En service du projet 1155. 1 est les armes hydroacoustiques suivantes: gak mgk-355 "polin"; Gaz MG-7 "Bracelet" - 2 ensembles; Gus "altyn"; Gaz mi-110 km.
Figure. 2. Grand navire anti-sous-marin du projet 1155 (1155. 1) L'armement hydroacoustique suivant est en service avec le projet 1155: GAK MGK-335 "Platinum"; Gaz MG-7 "Bracelet" - 2 ensembles; Gus "altyn"; Gaz mi-110 km. En service du projet 1155. 1 est les armes hydroacoustiques suivantes: gak mgk-355 "polin"; Gaz MG-7 "Bracelet" - 2 ensembles; Gus "altyn"; Gaz mi-110 km.
 Figure. 3. Navire de projet 956. Classe: Rocket-Artillery Ship, Sous-classe: Mission escarpée. 1 grade en service du projet 956 est les armes hydroacoustiques suivantes: gak mgk-355 "polin"; Gaz MG-7 "Bracelet" - 2 ensembles; Gas KMG-12 "Cassandra".
Figure. 3. Navire de projet 956. Classe: Rocket-Artillery Ship, Sous-classe: Mission escarpée. 1 grade en service du projet 956 est les armes hydroacoustiques suivantes: gak mgk-355 "polin"; Gaz MG-7 "Bracelet" - 2 ensembles; Gas KMG-12 "Cassandra".
 Figure. 4. Bateau de fusée de projet 1241. 2 En service du projet 1241. 2 Il y a les armes hydroacoustiques suivantes: gak mgk-345 "bronze"; Gaz mg-45 "backgammon";
Figure. 4. Bateau de fusée de projet 1241. 2 En service du projet 1241. 2 Il y a les armes hydroacoustiques suivantes: gak mgk-345 "bronze"; Gaz mg-45 "backgammon";
 Figure. 5. Bateau torpéré du projet 1241 en service du projet 1241 est les armes hydroacoustiques suivantes: gak mgk-345 "bronze"; Gaz mg-45 "backgammon";
Figure. 5. Bateau torpéré du projet 1241 en service du projet 1241 est les armes hydroacoustiques suivantes: gak mgk-345 "bronze"; Gaz mg-45 "backgammon";
 Figure. 6. Petit navire anti-sous-marin du projet 1124 En service du projet 1124 Il existe les armes hydroacoustiques suivantes: gaz MG-339 "Stron" ou gaz MG-339 T "Schend-T"; Certains projets sont armés de GAC MGK-335 "Platinum"; Gas MG-322 "argun" ou gaz mg-322 T "argun-t"; GAS MG-329 "OKA" ou Gaz MG-329 M "OKA-M"; Gaz mg-26 "hôte" ou gaz mg-45 "Backgammon"; Gas KMG-12 "Cassandra". Gas MG-409 S.
Figure. 6. Petit navire anti-sous-marin du projet 1124 En service du projet 1124 Il existe les armes hydroacoustiques suivantes: gaz MG-339 "Stron" ou gaz MG-339 T "Schend-T"; Certains projets sont armés de GAC MGK-335 "Platinum"; Gas MG-322 "argun" ou gaz mg-322 T "argun-t"; GAS MG-329 "OKA" ou Gaz MG-329 M "OKA-M"; Gaz mg-26 "hôte" ou gaz mg-45 "Backgammon"; Gas KMG-12 "Cassandra". Gas MG-409 S.
 Figure. 7. Projet BASIC BATSCH BTSCH 1265 (AVE. 260, 270) En service du projet 1265 contient les armes hydroacoustiques suivantes: gaz MG-79 ou gaz MG-89 "Sula"; Gus "Kabarga";
Figure. 7. Projet BASIC BATSCH BTSCH 1265 (AVE. 260, 270) En service du projet 1265 contient les armes hydroacoustiques suivantes: gaz MG-79 ou gaz MG-89 "Sula"; Gus "Kabarga";
 Figure. 8. Un grand navire d'atterrissage du projet du projet 775 775 au service du projet 775 est les armes hydroacoustiques suivantes: Gas MG-7 "Bracelet"; Gas MG-26 "Hôte" ou Gaz MG-45 "Backgammon".
Figure. 8. Un grand navire d'atterrissage du projet du projet 775 775 au service du projet 775 est les armes hydroacoustiques suivantes: Gas MG-7 "Bracelet"; Gas MG-26 "Hôte" ou Gaz MG-45 "Backgammon".
 Stations hydroacoustiques "Tamir-11" (1953) Gaz pour les navires de surface de petits déplacements Le nombre total de dispositifs - 17 masse des instruments - 1000 kg. Créateur en chef Vovochnoe B. N.
Stations hydroacoustiques "Tamir-11" (1953) Gaz pour les navires de surface de petits déplacements Le nombre total de dispositifs - 17 masse des instruments - 1000 kg. Créateur en chef Vovochnoe B. N.
 Hercules Hydroacoustic Stations d'hydroacoustique (1957) Gaz pour les navires de surface du nombre de périphériques multimédias et de grande taille - 30 masse d'instruments - 5800 kg de concepteur en chef Umikov Z.n.
Hercules Hydroacoustic Stations d'hydroacoustique (1957) Gaz pour les navires de surface du nombre de périphériques multimédias et de grande taille - 30 masse d'instruments - 5800 kg de concepteur en chef Umikov Z.n.
 Stations hydroacoustiques "Mezen-2" (1963) Détection de gaz du bas Min. Nombre total de dispositifs Masse d'instruments - 12 - 2100 kg de concepteur en chef bas novo I. I.
Stations hydroacoustiques "Mezen-2" (1963) Détection de gaz du bas Min. Nombre total de dispositifs Masse d'instruments - 12 - 2100 kg de concepteur en chef bas novo I. I.
 Stations hydroacoustiques "Kashalot" (1963) Gaz pour la recherche de navires counken Le nombre total d'instruments - 22 masse des instruments - 4000 kg (sans zip) Designer en chef Timokov N. A.
Stations hydroacoustiques "Kashalot" (1963) Gaz pour la recherche de navires counken Le nombre total d'instruments - 22 masse des instruments - 4000 kg (sans zip) Designer en chef Timokov N. A.
 Complexes hydroacoustiques "Rubin" (1964) GAK pour les sous-marins polyvalents Créateur en chef Ayalashka E. I. Nombre total de dispositifs - 56 masse d'instruments - 54747 kg
Complexes hydroacoustiques "Rubin" (1964) GAK pour les sous-marins polyvalents Créateur en chef Ayalashka E. I. Nombre total de dispositifs - 56 masse d'instruments - 54747 kg
 Stations hydroacoustiques "Titan-2" (1966) Gaz pour grands navires anti-sous-marins Total Dispositifs Masse d'instruments - 37 - 16 000 kg de concepteur en chef Harat G. M. M.
Stations hydroacoustiques "Titan-2" (1966) Gaz pour grands navires anti-sous-marins Total Dispositifs Masse d'instruments - 37 - 16 000 kg de concepteur en chef Harat G. M. M.
 Stations hydroacoustiques "Argun" (1967) GUS pour les petits navires anti-sous-marins Total des dispositifs Masse d'instruments - 30 - 7600 kg avec zip chef de concepteur Ivanchenko V. P.
Stations hydroacoustiques "Argun" (1967) GUS pour les petits navires anti-sous-marins Total des dispositifs Masse d'instruments - 30 - 7600 kg avec zip chef de concepteur Ivanchenko V. P.
 STATIONS HYDROACOUSTIQUES "Sula" (1969) Détection de gaz de l'ancrage et des mines de fond Le nombre total de dispositifs Masse d'instruments - 20 - 3900 kg Designer en chef Lyachenko G. G.
STATIONS HYDROACOUSTIQUES "Sula" (1969) Détection de gaz de l'ancrage et des mines de fond Le nombre total de dispositifs Masse d'instruments - 20 - 3900 kg Designer en chef Lyachenko G. G.
 Stations hydroacoustiques "Heech" (1971) Gas pour les tribunaux de recherche Nombre total d'instruments Masse d'instruments - 30 - 11 000 kg de concepteur en chef Klimenko J. P.
Stations hydroacoustiques "Heech" (1971) Gas pour les tribunaux de recherche Nombre total d'instruments Masse d'instruments - 30 - 11 000 kg de concepteur en chef Klimenko J. P.
 Complexes hydroacoustiques "Platinum" (1972) GAK pour les navires de surface des concepteurs en chef de déplacement moyen et grand de déplacement Klimovitsky L. D. Nombre d'instruments - 64 masse d'instruments - 23 tonnes
Complexes hydroacoustiques "Platinum" (1972) GAK pour les navires de surface des concepteurs en chef de déplacement moyen et grand de déplacement Klimovitsky L. D. Nombre d'instruments - 64 masse d'instruments - 23 tonnes
 Complexes hydroacoustiques "Polynom" (1979) GAK pour le CN de la CN des designers en chef de déplacement Soloviev V. G. Nombre total d'instruments - 152 Masse d'instruments - 72 000
Complexes hydroacoustiques "Polynom" (1979) GAK pour le CN de la CN des designers en chef de déplacement Soloviev V. G. Nombre total d'instruments - 152 Masse d'instruments - 72 000
 Complexes hydroacoustiques "STAR-M 1" (1986) Guck numérique pour NK Middle Désplacement En chef designer Aleshchenko O. M. Nombre total de dispositifs - 64 Dispositifs de masse - 23000 kg
Complexes hydroacoustiques "STAR-M 1" (1986) Guck numérique pour NK Middle Désplacement En chef designer Aleshchenko O. M. Nombre total de dispositifs - 64 Dispositifs de masse - 23000 kg
 Complexes hydroacoustiques de «Kabarga» (1987) Miniscovers Gus pour les sentiers marins, basiques et raid Nombre total de dispositifs - 42 masse d'instruments - 8500 kg de concepteur en chef Lyachenko G. G.
Complexes hydroacoustiques de «Kabarga» (1987) Miniscovers Gus pour les sentiers marins, basiques et raid Nombre total de dispositifs - 42 masse d'instruments - 8500 kg de concepteur en chef Lyachenko G. G.
 Complexes hydroacoustiques "STAR M 1 -01" (1988) Gaz numérique pour les navires de surface de petits concepteurs en chef des déplacements Aleshchenko O. M. Nombre total de dispositifs - 60 masse d'instruments - 16 500 kg
Complexes hydroacoustiques "STAR M 1 -01" (1988) Gaz numérique pour les navires de surface de petits concepteurs en chef des déplacements Aleshchenko O. M. Nombre total de dispositifs - 60 masse d'instruments - 16 500 kg
 Complexes hydroacoustiques "STAR-2" (1993) Guck numérique pour NC Grand Défileur de déplacement designer Borisenko N. N. Nombre total de dispositifs - 127 Dispositifs de masse - 77742 kg
Complexes hydroacoustiques "STAR-2" (1993) Guck numérique pour NC Grand Défileur de déplacement designer Borisenko N. N. Nombre total de dispositifs - 127 Dispositifs de masse - 77742 kg

 Complexes de perspective Corvette Projet 12441, qui prévoit l'installation de gaz "Zarya-2"
Complexes de perspective Corvette Projet 12441, qui prévoit l'installation de gaz "Zarya-2"
Sous-marins diesel-électriques soviétiques du bâtiment d'après-guerre Gagin Vladimir Vladimirovich
Complexes hydroacoustiques pl dans la lutte anti-sous-marine
Les bateaux diesel-électriques des premiers projets d'après-guerre "a pavé la route" pour les équipages de sous-marins modernes, dans les campagnes océaniques, gagnant le fonctionnement du fonctionnement des équipements militaires, maîtrisant les techniques de natation traitée, étudiant la situation hydrologique et hydrographique des zones stratégiquement importantes de l'océan, pratiquant la tactique des anti-palmaires et anti-forêt.
La tactique de la lutte anti-sous-marine est souvent réduite à la recherche et à la détection de l'aigle PL utilisant des moyens hydroacoustiques plus tôt que l'ennemi.
Dans le même temps, l'état du milieu environnant acquiert la valeur la plus importante, en particulier de tels paramètres, en tant que zones de convergence acoustique et la position du sous-marin par rapport à la "thermocline".
Les zones de convergence sont des zones en forme d'anneau autour du navire sous-marin. Le son du son du point de convergence situé dans la zone de convergence est réfragé en fonction de la pression et de la température de l'eau, se déplace et descend de haut en bas par rapport à la surface de la spirale par des intervalles irréguliers, qui dépendent également de l'état de l'environnement environnement.
Le commandant du navire, qui tente de ne pas tomber dans ces domaines - de savoir où, à son avis, l'objectif est, il peut éviter la détection. Pour ce faire, il doit être dans les zones où le son s'applique à sa source est simplement radialement.
Le moyen le plus simple consiste à prendre position supérieure à la couche de saut de température (thermocline) ou à celle-ci afin qu'elle partage les sous-marins - alors les sons publiés par son moteur seront probablement reflétés par la couche et le bateau ennemi ne le détectera pas. .
Le saut de température est une couche limite d'espace sous-marin, séparant de l'eau superficielle chaude et des zones profondes plus froides.
Les sous-marins diesel avec atomique, ils occupent une place importante dans les plans agressifs du bloc de l'OTAN des pays de l'OTAN. Selon le livre de référence "Jane", au milieu de 1980, dans les flottes de l'Union de l'Atlantique Nord, il y avait 186 bateaux diesel.
Les sous-marins diesel présentent certains avantages d'atomes, ils sont liés, en particulier moins de bruit, ce qui améliore les conditions d'exploitation de stations hydroacoustiques (gaz) lors de la résolution des problèmes de lutte anti-sous-marine.
Actuellement, selon la presse étrangère, l'intégration de la technologie hydroacoustique avec les systèmes de gestion des BIUS et des armes se produisant sur la base d'une large utilisation d'ordinateurs. En conséquence, les capacités tactiques de l'équipement hydroacoustique ont changé de manière qualitative. La probabilité de détecter les objectifs et la classification du contact reçu a augmenté. En outre, il est devenu réel en même temps de surveiller plusieurs cibles (jusqu'à six) cibles et de détecter rapidement les modifications de leur manœuvre, d'obtenir automatiquement des informations et de les émettre en permanence dans tous les systèmes de conjugué et clairement, dans une application pratique de manière commode, à afficher sur Écrans et écrans, et si nécessaire, inscrivez-vous.
Le traitement du signal numérique a permis aux systèmes de localisation passive sous-marin pour déterminer uniquement le bruit du porteur et la distance à celle-ci.
Enfin intégration divers systèmes Sur la base du contrôle simplifié par l'EMM sur le travail et la maintenance du gaz et autorisé à réduire le personnel de service, ce qui est important pour un déplacement relativement faible d'eau des sous-marins diesel.
Le fonctionnement principal de la station acoustique est le silence avec une gamme de plusieurs dizaines de kilomètres. Dans la fréquence basse fréquence (220 Hz - 7 kHz), la plage de réception du signal se produit sur une antenne acoustique conforme (combinée avec les parties du corps du boîtier) constituées d'hydrophones piézocéramiques et en haute fréquence (8 kHz) - sur un Antenne cylindrique avec des hydrophones de zirconate de plomb, placée près de Kiel. L'antenne cylindrique sert également à suivre plusieurs objectifs (jusqu'à quatre) cibles. Les deux canaux de redondance de bruit se complètent mutuellement. L'espace environnant est négligé par une enquête cohérente rapide d'un grand nombre de pétales formés statilement formés de l'orientation directionnelle. Objectifs bruyants détectés épluchent avec une méthode équivalente de précision élevée.
Le tractus actif a permis de procéder à une critique circulaire avec le rayonnement omnidirectionnel d'une parcelle ou lorsque la série de colis dans des directions changeantes séquentiellement, ainsi que d'émettre des colis uniques dans une direction spécifique. Les signaux d'écho acceptés sont affichés sur l'écran de l'indicateur et peuvent être enregistrés pour mesurer le décalage de fréquence Doppler.
Le trajet de l'emplacement passif comporte trois antennes réceptives, installées avec le boîtier dans le nasal, moyen et arrière, pour chaque côté du sous-marin. Ils prennent des objectifs de bruit soumis au traitement de corrélation, ce qui permet de déterminer le lieu de la cible pour trois lignes de position avec une précision suffisante. Les antennes de chemin peuvent être utilisées comme une suppression supplémentaire de bruit pour le chemin.
La station fournit des communications dirigées et non directionnelles.
Le trajet de détection des signaux des hydrolyateurs vous permet de détecter des signaux d'impulsion d'origines diverses à une distance de plusieurs dizaines de kilomètres, déterminez leur fréquence, leur durée et leur direction à la source du signal.
Dans la construction de la station, des circuits intégrés sont largement utilisés, en raison de la réduction de ses dimensions et de poids, une fiabilité est augmentée. Les données sur les cibles sont affichées sur deux écrans, accédez automatiquement à l'emballeur automatique Aum d'un système de prise de vue Torpedo où des commandes sont produites pour la cuisson.
Une station hydroacoustique plus simple a été développée. Il comprend des chemins de bruits, des échos et de l'emplacement passif. La recherche et la détection des objectifs sont effectuées en mode de branchement à l'aide de la méthode de correction de la méthode de traitement du signal. Une fois que l'objectif est détecté, la distance à laquelle elle est mesurée par rayonnement du colis schématique directionnel ou le procédé d'emplacement passif.
Afin d'augmenter l'efficacité de l'utilisation d'outils d'observation hydroacoustique sur les sous-marins, des instruments ont également des dispositifs permettant de mesurer la vitesse de propagation du son dans l'eau et de la signalisation du début de la cavité des vis à rames, des dispositifs permettant de contrôler le niveau de bruit propre .
Pour augmenter l'efficacité de l'utilisation du gaz, il existe un dispositif de construction de peintures radiales en fonction des données d'entrée de la répartition réelle de la vitesse de propagation du son avec une profondeur croissante. Le système est capable de fonctionner en mode simulateur avec la simulation de signaux entrant dans son entrée de diverses fins. Toutes les informations actuelles entrées dans le système dans le processus de son travail de combat et produites par elle peuvent être enregistrées pour une lecture et une analyse ultérieures. Le système est servi par un ou deux opérateurs.
Les gaz d'autres types ont des antennes partitionnées cylindriques. Pour un espace de vue circulaire, 96 pétales du modèle de rayonnement sont statiquement formés.
La détermination des coordonnées des objectifs et de suivi détectées est effectuée simultanément dans tous les modes à l'aide d'un ordinateur. En mode actif, pour obtenir une plage d'action maximale, elle est fournie pour la coordination des paramètres de rayonnement (puissance émise, fréquence, type de modulation de la parcelle) avec des conditions hydrologiques réelles dans la zone d'observation.
Dans le mode de détection des signaux. Les hydrolocateurs sont déterminés par le roulement sur la source du signal, sa fréquence et sa amplitude, la durée des impulsions, la fréquence de leurs suivantes et classant les sources de rayonnement le long de la totalité de toutes ces caractéristiques.
La station peut également travailler dans les modes auxiliaires: simulateur, insertion et contrôle automatique de la condition technique garantissant la détection de modules défectueux.
Toutes les commandes et deux écrans sont situés sur la console de gaz. Sur l'une d'entre elles avec une indication tricolore, qui représente un indicateur de révision circulaire, affichée simultanément dans la partie centrale. Réglage complet avec son navire dans l'échelle centrale et circulaire des cloches et sur les bords - des informations complètes sur le texte sur les objectifs accompagnés ( Distances, porteuses, valeurs des déplacements de fréquence Doppler, des cours, des vitesses), des données sur le parcours et la vitesse de votre navire, sur les paramètres de mode et d'opération du gaz. Les matrices hiérarchiques de texte sont affichées sur le second écran, dont le traitement vous permet d'optimiser le processus de contrôle de l'équipement. Une telle présentation d'informations simplifie de manière significative le service et le fonctionnement de la station et vous permet d'effectuer ceci à un opérateur.
En novembre 1983, l'APL de Victor-III a reçu une tâche visant à supprimer le bruit et d'autres caractéristiques de la quatrième fusée américaine Ohio-Type.
Selon l'équipage, le jeune capitaine ambitieux de notre sous-marin, inspiré par les exemples des héros-sous-mariniers de la guerre patriotique, a décidé presque d'aller à la baie de la base de Sugostise.
Pour le déguisement acoustique, la K-324 à Sargasso est venue sous un petit navire, qui a suivi le cours approprié. Tout s'est bien passé, comme tout à coup la vitesse de notre PL. A commencé à tomber rapidement, malgré l'augmentation de la turbine à maximum.
Aucun déclenchement et supposition de l'équipage à des résultats positifs à la LED - La vitesse est tombée à trois nœuds.
Nous pouvons faire n'importe quoi - je devais flotter. Pour apparaître presque à l'esprit les banques américaines, dans le "repaire" lui-même, pour ainsi dire.
Pour l'inspection de la vis principale, les réservoirs nasaux remplis, le bateau a acquis un différentiel décent sur le nez et une équipe d'urgence, armé de deux "Kalachnikov" et de deux heures (tout l'arsenal existant sur le sous-marin soviétique) a examiné l'aliment partie. Donc, c'est que certains câbles se sont avérés pour être enroulé sur la tige, très durables, ne pas partir, ni les files d'attente automatiques: tous les efforts étaient vains.
Le commandant a accepté la décision - d'aller à Cuba dans une position de nuit. C'était alors elle et capturé des pilotes américains, des marins et des touristes sur le yacht de plaisir.
Avec un chagrin de moitié à Cuba, Delzli. Le commandant a immédiatement appelé le "tapis". Mais, contrairement aux hypothèses suites sur son destin, le capitaine "à cheval" est retourné, le capitaine enroulé sur la vis par le sous-marin désespéré a été retourné, s'est révélé ne serait rien de plus que l'antenne hydroacoustique américaine la plus récente que les Américains négligents étaient testés sur un navire désagréable.
Nos scientifiques et technologues ont reçu des matériaux inestimables à explorer ...

Urgence pl k-324 à sargasso mer
Du livre de bataille pour Stars-2. Confrontation de l'espace (partie II) Auteur Perhearsh Anton IvanovichCombattre des complexes orbitaux pour "Burana" Nous nous rappelons que la fusée et le complexe spatial d'Energy-Buran ont été créés sur demande du ministère de la Défense de résoudre des problèmes militaires dans l'espace proche. Il est clair qu'à une fois, les charges complexes ont été développées avec le complexe pour
De la gestion de la qualité du livre Auteur Shevchuk Denis Aleksandrovich1.2. La gestion de la qualité en tant que facteur de succès de l'entreprise dans l'économie de marché de la lutte concurrentielle comme l'une des des caractéristiques les plus importantes Comprend la concurrence entre les sujets et les objets du marché. En concurrence, comprenez la rivalité entre les individus ou
Des navires martiaux du livre du monde au tournant des XX-XXI siècles, Partie III Frigates Auteur Apalkov Yuri ValentinovichÉtats-Unis Anti-Aircraft Systèmes de missiles Composition et principale TTX "Standard * SM-1" Standard "SM-2 MK 57 OTAN" SEA SHOARROW "" MER CHAPPAREL "Développeur de pays USA Général Dinamics Corporation, Division de la Défense aérienne USA Général Dinamics Corporation, Défense aérienne Division USA. Systèmes électroniques de l'OTAN Raytheon, Hughes Missile Systems Société USA Lockheed Martin Aeronutronic
Du livre Soviet Diesel-Electric Subsmarines de construction d'après-guerre Auteur Gagin Vladimir VladimirovichComplexes de missiles anti-sous-marins Composition et principale TTX "Misel" "Cascade" "Cascade" "Medveda" ASROCC CY-1 Milastrance Firm de Russie Raduboga Russie "Novator" Russie "Mirèdrekheni-ka" US Lockheed Martin Systèmes de défense tactique Chine CMTIEIE Adoption Gie Milas
Du livre. Armes de fusée domestique Auteur Premier, Mikhail AndreevichCertains aspects de la lutte anti-sous-marine des forces sous-marines après la Seconde Guerre mondiale ont subi des changements qualitatifs fondamentaux. Les sous-marins se sont tournés de la plongée dans des navires vraiment sous-marins, de l'autonomie, de la profondeur d'immersion, de la vitesse et de la plage
Du livre. Complexes anti-réservoirs domestiques Auteur Angel Rostislav DmitrievichSystèmes de missiles anti-aériens terrestres R-101R -101 (P-102) une fusée contrôlée anti-aérienne expérimentale. Équipé d'un soulagement. Conçu dans la seconde moitié des années 40. Dans NII-88, basé sur le orthèse du trophée allemand, le missile anti-aérien «Wasserfal». Les tests ont eu lieu en 1948. Concepteur en chef - Eugene
Des voitures secrètes du livre de l'armée soviétique Auteur Kochnev evgeniy dmitrievichSystèmes de missiles anti-aériens de mer B-753 "Volkhov" M-2. B-753 (13DM) Un complexe de missiles anti-aérien marins expérimentaux M-2 avec une fusée contrôlée en deux étapes équipée de Marshus Edd et de RDTT de départ. Créé sur la base des terres S-75 CPS. Développeur complexe - CKB
Du livre de l'aviation dans les guerres locales par Babich v.k.Systèmes de missiles anti-aériens portables "aiguille" (photos du magazine "défilé militaire") "Strela-2" "Strela-2M" "Strela-2" 9k32. Complexe de missiles anti-aériens portatif 9m32 9K32 avec une fusée minière à combustible solide contrôlée. Le premier CPS portable domestique. Conçu
Des ménages électroniques du livre par Kashkarov A. P.Complexes anti-missiles A. Système de défense anti-missiles «A» avec une défense antimissile en 1000. Le premier système national pro. Il a été déployé au polygone Sarah Shagan. Fourni la défaite d'un seul missile balistique monobloc de moyenne portée.
Du livre de métal Century Auteur Nikolaev Grigory IlyichComplexes anti-réservoirs de la deuxième génération «Fagot» adoptée en 1963, le complexe anti-réservoir de Maltka a principalement répondu aux exigences des troupes et à l'avenir prouvé positivement comme une arme efficace pendant les guerres locales. Cependant, et
De l'évolution du livre des systèmes anti-sous-marins des navires domestiques par Kazakin Leonid.Systèmes de missiles anti-réservoirs des années 90 au milieu des années quatre-vingt, ainsi que les travaux sur la modernisation des complexes anti-réservoirs créés précédemment, principalement pour assurer la possibilité de vaincre les objectifs modernes avec élevés
Du livre de l'auteurComplexes missiles mobiles et d'artillerie Le premier lanceur du BR-264 pour le montage sur le châssis de la voiture a été créé dans l'usine de barricadade en septembre 1961 et faisait partie du PCC expérimental 9k71 "Temp" avec une fusée de carburant solide 9m71, qui a été développée avec
Du livre de l'auteur3. Dans la lutte pour la survie dans les guerres locales, comme indiqué, le taux de survie a été évalué par des experts étrangers en termes de perte - le ratio du nombre d'aéronefs abattus au nombre d'aéronefs arrangés-départs. Par exemple, le niveau de perte d'escadron tactique,
Du livre de l'auteur4.8.2. Des techniques efficaces dans la lutte contre les interférences dans la lutte contre le bruit traversant la ligne, il est préférable de combiner des filtres RF linéaires et des suppresseurs de processus transitoires dans la ligne AC. Cette méthode peut être réalisée par interférences de 60 dB aux fréquences à
Du livre de l'auteurChapitre 1. Dans la lutte contre la corrosion de la science des métaux dans le monde, rien n'est éternel - tout le monde connaît cette vérité non accompagnée pendant une longue période. Ce qui semble être toujours inébranlable - des montagnes, des blocs de granit, des continents entiers, - éventuellement détruits, dispersés dans la poussière, passent dans l'eau, tombent dans des profondeurs.
Du livre de l'auteurLes complexes de fusée anti-sous-marin ont déjà été mentionnés, avec l'apparition de sous-marins nucléaires dans les années 1950, de nouveaux systèmes d'armes étaient nécessaires, capables de frapper des objectifs sous-marins sur une large gamme. En URSS, travailler dans cette direction a été lancé selon
Dans un avenir prévisible, les sous-marins et les aéronefs anti-sous-marins de la marine russe devront obtenir les systèmes hydroacoustiques du nouveau type. Selon les derniers rapports, jusqu'à la fin de la décennie, le Département militaire a l'intention d'acquérir un grand nombre de moyens de suivi pour la situation sous-marine. De tels achats permettront d'équiper les moyens modernes de détection de nombreux sous-marines de construction ou modernisé, d'avions, etc.
À la fin du mois de mars, une nouvelle commande a été placée sur le site officiel de l'approvisionnement de l'État par le ministère de la Défense concernant le développement ultérieur de la partie importante de la marine. Selon les informations sur les offres publiées, le ministère prévoit d'acheter 55 complexes hydroacoustiques (GAK) de la famille MHK-335EM-03 de "Kryakva" dans différentes modifications. Pour l'achat de tous les produits requis, le département militaire ne dépensera pas plus de 194,6 millions de roubles - en moyenne plus de 5,3 millions par complexe. Les premiers complexes dans le cadre de l'ordre futur doivent déjà être fournis cette année. L'achèvement des livraisons est prévu pour 2019.
Schéma général du complexe MGK-335EM-05
Selon les données publiées, les forces armées ont l'intention d'acheter des complexes de "Kryakva" de trois modifications, ce qui leur permettra d'équiper des sous-marins, des aéronefs anti-sous-marins et des systèmes fixes. Pour les forces sous-marines, 16 Kryakva-A complexes sont achetés. Le même nombre de systèmes devraient recevoir l'aviation marine. Les 23 ensembles de la version Kryakva-B seront achetés pour des stations d'exploration hydroacoustique.
Les candidatures pour l'offre sont acceptées jusqu'au 17 avril. Peu de temps après, un contrat pour la fourniture des produits requis sera signé, après quoi leur production commence. Comme mentionné, le département militaire souhaite obtenir les premiers complexes hydroacoustiques des types requis cette année.
Selon des rapports, le complexe hydroacoustique MGK-335EM-03 "Kryakva" a été créé par la préoccupation "Oceanpribor" (Saint-Pétersbourg). Ce complexe est destiné à être installé sur des véhicules de petite et moyenne taille. Il est possible d'installer tous les équipements nécessaires à la fois lors de la construction de navires et lors de la réparation et des mises à niveau. Dans ce dernier cas, le système Kryakva est un remplaçant pour le plus ancien complexe MGK-355MS. Selon des rapports, de nouvelles modifications conçues pour l'exploitation sur d'autres supports ont été créées sur la base du complexe de navires. En conséquence, le gaz familial de Kryakva peut également être utilisé par les sous-marins, les avions et les systèmes d'intelligence stationnaires.
Indépendamment du transporteur, les complexes ont des tâches similaires et sont aussi unifiées que possible. Leur tâche principale est de rechercher des sous-marins. La détection des objectifs est effectuée en mode actif à l'aide de l'écholisation ou du passif - dans ce cas, votre propre bruit est suivi. De plus, il est possible de détecter des signaux d'autres complexes fonctionnant en mode actif. En outre, l'automatisation des "colards" est capable d'accompagner de manière indépendante la cible et de publier des données sur la désignation ciblée sur le contrôle du tir à l'arc anti-sous-défense des opérateurs. Il est possible d'automatiser la classification de l'objet détecté. MGK-335EM-03 Complexes "Kryakva" a une fonction de liaison hydromoustique à des fréquences basses et hautes. Il prévoit également l'utilisation de la communication et de l'identification de code.

Architecture gak mgk-335em-03
Afin d'augmenter les caractéristiques opérationnelles, les complexes ont un certain nombre de fonctionnalités et de fonctions importantes. Lors du fonctionnement du complexe hydroacoustique, le contrôle automatique du niveau d'interférence acoustique est effectué. L'automatisation est capable de prédire la plage attendue du système en fonction des conditions actuelles. Il existe des commandes automatisées pour le fonctionnement de tous les composants du complexe et suivent leur statut. L'automatisation suit indépendamment le fonctionnement des agrégats et fait des diagnostics. En cas de détection de problèmes en mode automatique, leur localisation est effectuée. Il existe une fonction d'opérateurs de formation, au cours desquelles les cibles MIMI sont utilisées.
DANS configuration de baseDestiné à l'installation sur des navires de surface, gak mgk-335em-03 "Kryakva" contient plusieurs appareils principaux dans sa composition résolvant diverses tâches. Le principal moyen d'observer et de détecter les objectifs dans ce cas est une antenne passive active-passive porchaire. Il est fabriqué sous la forme d'un corps cylindrique équipé d'un grand nombre d'éléments sensibles. Pour préserver la position de l'antenne souhaitée pendant le fonctionnement, un système de suspension spécial avec des dispositifs de stabilisation est utilisé. L'antenne a une hauteur de 1 m et un diamètre de 1 m. Le cercle de cylindre est situé 36 piliers avec 12 éléments sur chacun.
Également à bord du navire porteur, le dispositif générateur, la réception et l'amplification et le dispositif de correspondance, ainsi que des dispositifs de traitement de signal numériques et des dispositifs de commande de contrôle et de stabilisation sont également montés. Tous ces éléments du complexe sont interconnectés. L'alimentation électrique à tous les composants du complexe est effectuée à l'aide d'un dispositif d'alimentation séparé connecté aux systèmes électriques de cadre général.
Sur le lieu de travail de l'opérateur complexe, il est proposé de monter une télécommande avec tous les contrôles nécessaires. Les données sur la situation sous-marine, des fins détectées et le fonctionnement des fonds hydroacoustiques sont affichés dans deux couleurs moniteur. Les principaux corps de contrôle sont le clavier et le trackball placé sur la console avant. Une partie des boutons et des commutateurs sont placées à côté des moniteurs. Le développeur du système Kryakva est également proposé d'utiliser un indicateur distant. À une certaine distance de la console principale, un moniteur supplémentaire qui affiche des informations sur le paramètre de courant peut être installé.

Antenne de plugal "Mallard"
Selon des rapports, la famille Kryakva comprend des complexes hydroacoustiques de plusieurs modèles, différant de l'autre avec la composition d'équipements spéciaux, principalement des antennes et d'autres moyens de détection. Ainsi, dans le projet MGK-335EM-01, l'antenne podloile est complétée par une antenne étendue flexible remorquée. Le complexe MGK-335EM-02 a une extension émise et flexible sur une extension flexible et flexible. Le produit MGK-335EM-04 est caractérisé par une plage de fréquences étendue lorsqu'elle fonctionne en mode actif, qui permet la détection de torpilles et les versions "Mallard" de MGK-335EM-05 ont abaissé des antennes de réception et d'émission.
Selon les données officielles de la préoccupation «Oceanpribor», MGK-335EM-03 GAK «Kryakva» est capable de détecter un sous-marin avec un rayon équivalent de re \u003d 10 m à des distances jusqu'à 10-12 km. Les coordonnées de l'objectif sont déterminées avec une précision de 30 'sur une roulement. La précision de la distance atteint 1% de la distance de la distance. Dans le mode d'appauvrissement du bruit, le complexe est capable de capturer des sons avec une fréquence de 1,5 à 7 kHz. Après avoir détecté le but et le prendre à l'accompagnement, la précision de la définition du roulement est de 30 '. Le mode de détection des signaux hydroacoustiques, qui implique la détection du gaz actif fonctionnant en mode actif, vous permet de contrôler la plage de fréquences de 1,5 à 7 kHz. Le roulement sur la source du signal détecté est déterminé avec une précision allant jusqu'à 10 °.
Analyse de la nature des signaux réfléchis reçus ou interceptés, le complexe MGK-335EM-03 est capable de déterminer l'appartenance de l'objet détecté à une ou plusieurs catégories de technologie. Avec une aide de l'opérateur, le complexe hydroacoustique est capable de distinguer un sous-marin de la torpille. Dans le même temps, il est possible de délivrer simultanément une désignation cible des systèmes d'armes anti-sous-pont.
Le complexe de Kryakva est caractérisé par une caractéristique assez élevée de la communication hydroacoustique et présente également certaines caractéristiques spéciales. La communication basse fréquence ou haute fréquence est effectuée sur la plage allant jusqu'à 20 km. La communication de code, l'identification d'un objet détecté ou une modification de la distance peut être effectuée à des distances jusqu'à 30 km. Avec l'aide de GAK MGK-335EM-03, l'équipage de navire de support peut prendre en charge la connexion téléphonique avec des sous-marins russes et des navires à l'aide de la gamme de fréquences de l'OTAN.

Complexe du panneau de commande
Selon le dernier, en 2017-2019, la marine recevra 55 kits de la famille MGK-335EM-03 de "Kryakva" dans différentes configurations destinées à être installées sur les médias de diverses classes. La plupart de ces équipements sont prévus d'être installés dans des stations d'exploration hydroacouacée, tandis que d'autres complexes seront utilisés par les sous-marins et les aéronefs. Informations exactes sur les futurs transporteurs de complexes commandés, pour des raisons évidentes, sont actuellement manquants. Bien qu'il ne reste plus que pour construire des prévisions et essayer de prédire exactement quelle technique sera équipée d'un tel équipement.
Dans le cas de l'aviation anti-sous-marin, l'IL-38 et la TU-142 des dernières modifications peuvent être considérées comme des transporteurs possibles. Maintenant, cette technique est réparée et modernisation, au cours de laquelle divers nouveaux équipements reçoivent. Les mises à jour du projet suivantes peuvent également utiliser les derniers systèmes hydroacoustiques.
16 complexes de la configuration des sous-marins seront achetés. Probablement, cet équipement sera utilisé dans la réparation future des navires existants de projets relativement anciens. Compte tenu de l'âge et de l'équipement des sous-marins composés de sous-marins, on peut supposer que tous les sous-marins domestiques atomiques et diesel-électriques de tous les projets existants peuvent devenir des transporteurs potentiels de systèmes «Kryakva». Tous les navires des forces sous-marines russes ne sont pas équipées de moyens d'observation modernes de la situation sous-marine, c'est pourquoi de nouveaux produits similaires ont besoin. Comme réparé, ils pourront recevoir de nouveaux appareils avec des caractéristiques élevées.
Il est curieux que dans les conditions de l'offre actuelle, il ne sert à rien d'acheter des complexes hydroacoustiques destinés à l'installation sur des navires de surface. Le produit MGK-335EM-03 a été initialement conçu avec précision comme un navire d'observation et que ce n'est que développé, à la suite de laquelle il était possible d'être installé sur d'autres transporteurs. Selon certaines raisons non compréhensibles dans les plans les plus proches du département militaire, l'achat de Guck à gaz de Kryakva.

Schéma du complexe de navires MGK-335EM-05 avec une antenne inférieure supplémentaire
Selon les médias nationaux, il est déjà connu lorsque les complexes hydroacoustiques achetés iront. Les produits obtenus Le ministère de la Défense distribue entre plusieurs composés de la marine et de l'aviation marine responsable de la mise en œuvre de l'antithine défense. L'équipement ira à KRONSTADT, SEVEROMORSK et NOVOROSSIYSK, ainsi que sur certaines bases du territoire Primorsky. Les autres détails de l'exploitation future de systèmes prometteurs ne sont pas encore communiqués.
Du des données disponibles, il s'ensuit que l'équipement des sous-marins, des avions et des systèmes hydroacoustiques fixes avec de nouveaux complexes de la famille de "Kryakva" de MGK-335EM-03 aura des conséquences positives sur l'ensemble de la défense anti-sous-marine de la flotte dans son ensemble. Au cours de la construction ou de la modernisation des sous-marins, des aéronefs, etc. Il recevra des équipements modernes pour suivre des objets sous-marins, qui apparaîtront en conséquence sur l'efficacité de leur travail. En conséquence, la gamme et la probabilité de détecter des objets potentiellement dangereux augmenteront sensiblement.
Outre les tâches principales associées à la détection et à la maintenance de divers objets, le nouveau gaz peut être utilisé pour identifier les objectifs trouvés, émettre des systèmes de gestion de ciblage, etc. Également prévu un régime de formation qui facilite la préparation des opérateurs d'hydroacoustique.
Selon les données officielles, à la mi-avril, le département militaire complétera l'acceptation des demandes d'offre récemment lancée et commencera à choisir le fournisseur de l'équipement requis. Bientôt, il devrait y avoir un accord pour la fourniture, après quoi la question de la série des modifications requises par le GAK commencera. Les premiers échantillons de tels équipements sont déjà planifiés dans l'année en cours, ce dernier - au plus tard à la fin de 2019. De toute évidence, la fourniture de ces produits sera effectuée simultanément avec la construction / la modernisation de leurs transporteurs. Cela signifie qu'au début du début de la prochaine décennie, la défense anti-sous-marine nationale recevra de nouveaux équipements et avec de nouvelles opportunités. Tout cela affectera positivement le potentiel de la marine en général.
Selon les matériaux des sites:
http://zakupki.gov.ru/
http://i-mash.ru/
http://oceanpribor.ru/
http://armsdata.net/
http://flot.com/
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé comme une armement hydromoustique des sous-marins de diverses fins, ainsi que lors de travaux géologiques et hydroacoustiques sous-marins.
Les complexes hydroacoustiques (gaz) constituent la base d'un soutien informatif des sous-marins. Le gaz typique comprend les chemins suivants (stations hydroacoustiques) et systèmes:
Silence silencieuse (SP), solitude, principalement, les tâches de détection de sous-marins et de navires de surface;
Hydrolections (CH), fonctionnant en mode actif de détection de cible sous-marine à une distance élevée;
Détection de signaux hydroacoustiques (OGS) conçus pour détecter ceux qui fonctionnent dans diverses gammes d'hydrolyateurs;
Son et identification;
Ministans (MI), qui effectue en même temps les caractéristiques de détection des obstacles près du sous-marin;
Central système informatique (CCC);
Système d'affichage, d'enregistrement, de documentation et de gestion (SORPP).
La composition de chaque chemin comprend des antennes acoustiques. Les périphériques générateurs sont connectés aux antennes rayonnantes et avec des dispositifs de prétraitement de réception.
Le sous-marin GSU 90 est connu, développé par STN Atlas Electronic (Allemagne), contenant HP, CP, OGS, la communication et MI, et CVS, SORG et un pneu total.
Les signes, communs avec le gaz réclamé, sont toutes des composants répertoriés de cet analogue.
Les raisons qui empêchent la réalisation de cet analogue du résultat technique obtenu dans l'invention sont un niveau relativement élevé d'interférences hydrodynamiques et du bruit du bateau et de l'absence de possibilité de travail indépendant et simultanément des gestionnaires et une communication sonore et identification , ainsi qu'une plage de fréquences relativement étroite de signaux connectés.
À partir de ces lacunes, le gaz est gratuit, protégé par le certificat de la Fédération de Russie n ° 20388 pour un modèle d'utilité, IPC G01S 3/80, 15/00, 2001. Cet analogique contient toutes les composantes du premier analogue, cependant, la antenne large bande non directionnelle émise et est également introduite dans son trajet de distribution et son identification. Le dispositif générateur, et dans les antennes de la tractueuse OGS et du haut débit et un dispositif de prétraitement, tandis que toutes les antennes acoustiques sont placées dans le carénage du nez ou dans la clôture de la coupe.
Tous les composants de cet analogique, ainsi que les composants du premier analogique, sont inclus dans la composition du gaz proposé.
Les raisons qui empêchent la réalisation de cet analogue du résultat technique atteint dans l'invention sont les suivantes:
Un aperçu limité de l'antenne principale du tractus HP, en raison de l'assombrissement des coins d'alimentation avec le cas;
Les tailles limitées de l'antenne nasale principale ne permettent pas de localiser les sources de signaux, dont la gamme de fréquences est inférieure à 0,8 à 1,0 kHz;
La seule antenne émettrice du chemin de la main a un secteur d'irradiation limité et relativement étroit de l'espace dans le compartiment nez;
L'antenne émettrice nasale du trajet de communication et l'identification est ombrée par le corps, ce qui élimine le lien avec des correspondants dans le secteur des coins d'alimentation;
Réception des signaux de tractus ogs sur une antenne avec une caractéristique multi-traitement de la direction (xn) empêche la conception du carénage nasal;
L'antenne haute fréquence ciblée du chemin OGS sombre la conception de la clôture de la clôture.
L'essence la plus proche de l'essence technique au revendiquée (prototype) est un gaz sous-marin, protégé par le brevet de la Fédération de Russie n ° 24736 pour un modèle d'utilité, cl. G01S 15/00, 2002. Il contient les chemins du SP principal et supplémentaire, le tractus ogs, le tractus HL, le tract de la communication et de l'identification, du chemin du ministère et de la détection des obstacles de la navigation (MI), des CVS, SORG et un pneu total.
Le tractus principale SP contient l'antenne de réception nasale principale, réalisée avec la possibilité de former une caractéristique de la fédération statique dans des plans horizontaux et verticaux, et le premier dispositif de prétraitement placé dans la capsule à l'intérieur de l'antenne.
Le tractus d'un SP supplémentaire contient une antenne remorquée étendue flexible (GPBA), un câble de câble, un dispositif de collecteur de courant et un dispositif de pré-traitement.
Le chemin OGS contient trois antennes de réception et dispositif de pré-traitement. La première antenne est placée dans la partie nasale de la clôture de la coupe et a un XN multi. La deuxième antenne est placée dans la partie d'alimentation de la clôture de la coupe et est omnidirectionnelle et haute fréquence. La troisième antenne est large bande et ses blocs sont placés dans le carénage nasal, dans la partie arrière de la clôture de la coupe et sur les côtés du sous-marin.
Le trajet d'hydrolection contient une antenne émettrice d'abattage, placée dans la partie nez de la clôture de la découpe, deux antennes émettrices intégrées, situées des deux côtés du sous-marin et le dispositif générateur.
Le chemin de communication et l'identification contiennent une antenne émettrice nasale, placée dans une antenne à usure de nez à l'usure, placée dans la clôture de la coupe et le dispositif générateur.
Le tractus contient une antenne de transmission de réception, réalisée avec la possibilité de rotation de la HN dans le plan vertical et le dispositif de génération, le commutateur "récepteur" et le dispositif de prétraitement.
Le sorf de l'appareil est constitué de suppression double glissante avec des dispositifs périphériques connectés. Entrées et sorties Il est connecté directement au CVS.
Grâce au pneu total, les dispositifs générateurs et les dispositifs de pré-traitement de tous les chemins sont connectés au CVC et à Sorror.
Les signes, communs avec les signes du gaz proposé, sont toutes des composantes répertoriées du complexe de prototypes et de la relation entre elles.
La raison pour laquelle la réalisation du résultat technique atteint dans le prototype complexe atteint dans l'invention est un secret relativement faible du complexe.
Une autre raison empêchant le résultat du résultat indiqué est une plage insuffisante d'objectifs sous-marins en mode HL.
Ces deux raisons sont dues au fait que les antennes du chemin HL émettent simultanément un signal dans presque toutes les directions, bien que le signal lui-même et l'impulsion. Le fait est que les trois antennes du chemin CL ont un XN assez large pour bloquer le secteur du travail, à l'exception des coins d'alimentation. Cela vous permet de détecter le rayonnement de presque n'importe quelle partie, ce qui augmente considérablement la probabilité de détection de sous-marins. D'autre part, une grande largeur de la HN de l'antenne entraîne une diminution de son coefficient de gain, et donc la puissance du signal émis, ce qui signifie la plage de la cible sur laquelle cette puissance sera suffisante pour sa détection confiante. .
La tâche technique, sur la solution dont l'invention est dirigée, est d'augmenter la largeur du fonctionnement du gaz et de la plage de détection des objectifs en mode HL.
Le résultat technique est obtenu par le fait que, dans la société connue, toutes les antennes rayonnantes du tracture HL sont effectuées électroniquement contrôlées par le nombre de rayons Xn et leur largeur et leur direction, tandis que les entrées de contrôle de ces antennes sont connectées via le total bus connecté au CSW et sorg, le nombre de rayons Xn à chacune des antennes par unité, plus que le nombre d'objectifs d'antenne accompagnés et leur largeur est minimale possible, mais suffisante pour la capture et le maintenance confiants de la cible, tandis qu'un Les rayons HN ont une largeur suffisante pour capter le but de l'escorte et scanner le coin dans les antennes du secteur de la responsabilité spécifiées et les rayons restants des antennes HN accompagnent la cible détectée détectée.
Pour obtenir un résultat technique dans le gak contenant le chemin du SP principal, le tractus de SP supplémentaire, le chemin OGS, le chemin HL, le tract de la communication et de l'identification, du chemin de MI, de CVS, de sorf et du pneu total, tandis que L'équipement est satisfait du double glissement avec des dispositifs périphériques connectés et délimitée avec des CV, le chemin HP principal contient l'antenne de réception nasale principale, réalisée avec la possibilité de former une Federa statique dans des plans horizontaux et verticaux et le premier dispositif de prétraitement , placé dans la capsule à l'intérieur de l'antenne et connecté directement à la sortie d'antenne et la sortie - à travers le pneu total avec CV et SORG, le chemin OGS contient la première antenne placée dans la partie nez de la clôture de la découpe et d'avoir un Multi-traitement HN, la deuxième antenne, placée dans la partie d'alimentation de la clôture de la découpe et constitue une troisième antenne haute fréquence et omnidirectionnelle, dont les blocs sont situés dans la partie d'alimentation du nez de la clôture de la découpe et des côtés Le bateau à double sens, qui est large bande et le deuxième dispositif de pré-traitement, dont les entrées de signal sont connectées directement aux sorties des antennes appropriées du chemin OGS et de l'entrée de commande et de la sortie - à travers un pneu total avec CV et Sorror, le chemin CL contient une antenne émettrice nasale claquant placée dans les clôtures de coupe du nez, deux antennes rayonnantes embarquées, placées des deux côtés du sous-marin et le premier dispositif générateur, dont les sorties sont connectées au signal Les entrées des antennes émettrices correspondantes du trajet HL et de l'entrée de commande - à travers un pneu total avec CV et SORO, le chemin de communication et l'identification contiennent une antenne rayonnante nasale placée dans la coopérative à base de nez, l'antenne émettrice d'alimentation, placée Dans la clôture de la découpe et le deuxième dispositif générateur, dont les sorties sont connectées aux entrées de signal des antennes émettrices du chemin de communication et de l'identification, ainsi que l'entrée de commande - à travers un pneu total avec CV et SORG, le tractus contient Antenne de transmission de la réception exécutée Euh avec la possibilité de rotation de la HN dans le plan vertical et le troisième générateur placé dans le nez, le troisième générateur, qui est connecté à la sortie d'entrée de l'antenne de chemin via le commutateur de réception et l'entrée de commande - pneu totale avec cv et sorg, et la troisième du dispositif de prétraitement, dont l'entrée est connectée directement à la sortie de l'antenne de transmission de réception et la sortie - à travers le pneu total avec le CCC et le SORP, le trajet de la SPP supplémentaire contient le GPB, via le câble-câble et le dispositif de collecteur de courant connecté au quatrième dispositif de pré-traitement connecté à sa sortie via un pneu total avec CCL et SORAG, toutes les antennes rayonnantes du trajet d'hydrolection sont contrôlées électroniquement à la fois contrôlées électroniquement. par le nombre de rayons Xn et leur largeur et leur direction, tandis que les entrées de contrôle de ces antennes sont connectées via le bus total connecté au CSW et à Sorrod, le nombre de rayons HN chacune de chaque antenne par unité est supérieur au nombre d'accompagnations par ces objectifs d'antenne et leur largeur est minimalement possible, mais Il est précis pour la capture et la maintenance confiants de la cible, tandis que l'un des rayons du XN a une largeur suffisante pour capturer l'objectif de l'escorte et analyse une antenne dans le secteur de la responsabilité d'antenne donnée et les rayons restants de la HN accompagnent les cibles détectées détectées.
Les études du GAA réclamé sur la littérature brevetée et scientifique et technique ont montré que l'ensemble des caractéristiques nouvellement introduites des antennes du tractuel HL et de nouveaux liens ainsi que le reste des éléments et les connexions du complexe ne sont pas disposés à la classification automatique. . Dans le même temps, il ne devrait pas être explicitement de l'art antérieur. Par conséquent, le gaz proposé devrait être considéré comme satisfaisant le critère "nouveauté" et avoir un niveau inventif.
L'invention est illustrée par le dessin sur lequel la figure 1 présente le diagramme structurel du gaz proposé.
Le complexe comprend des chemins du SP principal et additionnel, du tractus hl, du chemin HL, du tractus de la communication et de l'identification, du chemin de MI, du CSS et du SORG et un pneu total.
Le chemin principal SP contient l'antenne de réception nasale principale 1 et le dispositif de pré-traitement 2, connecté séquentiellement à l'antenne 1. Le dispositif 2 est placé dans une capsule hermétique à l'intérieur de l'antenne 1 (le composé d'antenne 1 avec le dispositif 2 est indiqué dans FIGUE. 1 flèche en pointillé). L'antenne 1 et le dispositif 2 sont multicanaux et consistent en n × m canaux, où n est la quantité de xn (canaux spatiaux) dans le plan horizontal, une m est la quantité de xn (canaux spatiaux) dans le plan vertical. Grâce au bus total 3 du complexe, le dispositif de tractus SP principal 2 est associé à CVS 4 et à SORG 5.
Le trafic d'une SP supplémentaire (basse fréquence) contient GPB 6, via un câble-câble 7 et un dispositif de collecteur de courant (sur la figure 1 n'est pas représenté) connecté au dispositif de prétraitement 8. Grâce au bus total 3 du complexe, le dispositif 8 du trajet du SPP supplémentaire est associé aux CVS 4 et SORG 5.
Le tractus HL contient une antenne émettrice de nez errant 9, deux antennes rayonnantes à bord 10 et 11 et le dispositif générateur 12. L'antenne 9 est placée dans la clôture de la coupe 13 et l'antenne 10 et 11 - des deux côtés du sous-marin. Les antennes 9, 10 et 11 sont gérables électroniquement. Leurs entrées de signal sont connectées directement aux sorties correspondantes du dispositif 12 et des entrées de commande - à travers le bus total 3 du complexe avec CVS \u200b\u200b4, ainsi que l'entrée de commande du dispositif 12.
Le chemin OGS contient des antennes 14, 15, 16 et un dispositif de pré-traitement 17. L'antenne 14 a un XN multipath et est située dans la partie nasale de la clôture de la coupe. L'antenne 15 est située dans la partie d'alimentation de la clôture de la découpe et est omnidirectionnelle et haute fréquence. L'antenne 16 est large bande et ses blocs 16.1, 16.2, 16.3 et 16.4 sont placés dans la pince nez 18, sur les côtés et dans la partie d'alimentation de la clôture de la clôture 13. Les sorties des antennes 14, 15 et 16 sont connectées directement aux entrées correspondantes du dispositif 17 reliées par sa sortie via un pneu total de 3 complexes avec CVS \u200b\u200b4 et Sorcha 5.
Chemin de communication et identification contiennent une antenne rayonnante nasale 19, l'antenne émettrice d'alimentation 20 et le dispositif générateur 21. L'entrée de commande du générateur 21 à travers le bus total 3 du complexe est connectée aux CVS 4, et les première et seconde sorties sont directement avec les antennes et 20 entrées, respectivement.
Le tractus contient une antenne de transmission de réception 22, le dispositif générateur 23, le commutateur de réception (non représenté) et le dispositif de pré-traitement 24. L'antenne 22 est placée dans le carénage nasal 18 et est configurée pour faire pivoter la HN dans le plan vertical, sa sortie d'entrée via le commutateur de réception est connectée à la sortie du périphérique 23 et de l'entrée du périphérique 24. L'entrée de commande de Le dispositif 23 et la sortie du dispositif 24 à travers le complexe TIX TIRE 3 connecté à CVS 4 et SORG 5.
En plus du pneu total, 3 complexes entre les CVS 4 et Sorud 5 contiennent un certain nombre de connexions directes.
CCS 4 est une combinaison de processeurs universels et de processeurs spéciaux et présente la structure de l'ordinateur de contrôle.
Trier 5 se compose de deux consoles, chacune ayant deux affichages dans sa composition, des commandes (clavier, boutons, sockets). La structure des consoles est similaire à la structure d'un ordinateur personnel. Les périphériques typiques sont connectés aux ports des consoles: téléphone, haut-parleur, imprimante, enregistreur, enregistreur magnétique et optique.
Le travail du gaz proposé est effectué comme suit.
Les antennes de réception 1, 6, 14, 15 et 16 effectuent la transformation d'oscillations électriques (acoustiques) en mécanique. L'antenne 22 est réversible.
Dans le tractus HL, la réception d'écho est effectuée par antenne 1. Dans le chemin de communication et l'identification de la réception des signaux de communication et des signaux d'écho effectue également une antenne 1.
Dans les dispositifs de générateur 12, 21 et 23, un signal d'impulsion de la puissance requise est formé pour l'amplification et le rayonnement ultérieurs en tant que signal de sondage avec des antennes 9, 10 et 11 du trajet manuel, des antennes 19 et 20 du trajet de communication et de l'identification et antenne 23 tractus. Les signaux de commande des paramètres des signaux générés sont formés pour trier 5 et le CCS 4.
Les dispositifs 2, 8, 17 et 24 du prétraitement sont pré-traitement des signaux reçus, c'est-à-dire leur amplification, filtrage, traitement de temps de fréquence et conversion de la vue analogique en numérique.
CCS 4 et SORG 5 sont des systèmes impliqués dans le travail de tous les chemins HAC. Ils travaillent avec des données numériques. La base des travaux de ces systèmes est l'algorithme de traitement d'informations mis en œuvre par logiciel. Ces fonds sont effectués:
La formation complète des paramètres du signal d'impulsion, qui puis dans les dispositifs de générateur est formée et amplifiée par puissance;
La formation de la HN des antennes contrôlées du tractus HL, en tenant compte de la nécessité de scanner leurs rayons;
Traitement secondaire des informations qui détecte la structure de signal fin;
Prendre une décision sur la détection de l'objectif;
Cible de support automatique.
Le fonctionnement du gaz est géré par des opérateurs placés derrière les consoles. Trier 5. Le mode de fonctionnement principal est la réception, avec le SP principal et additionnel, les OGS, la communication. Les chemins HL et MI, ainsi que le mode "Travail actif" du chemin de communication, sont inclus sur le rayonnement sur les commandes du SORPP. 5. Les canaux de réception fonctionnent simultanément et indépendamment les uns des autres. Les signaux reçus à travers des antennes 1, 14, 15, 6, 6 entrent les dispositifs 2, 8, 17, 24, sont basés sur des gammes de fréquences, leur traitement de fréquence est effectué. En outre, les signaux reçus et transformés sur le total du bus 3 sont inscrits au CCC 4, où le logiciel sur la base des algorithmes effectués dans les algorithmes de gaz a produit le traitement du signal secondaire. Les éléments du mouvement et des coordonnées des objectifs sont déterminés, les données obtenues dans le même objectif de divers chemins sont généralisées. L'opérateur décide de l'attribution des objectifs de support automatique et transmet la commande appropriée.
S'il existe une commande de l'opérateur approprié de Sorud 5 sur l'inclusion des principaux modes actifs, cette commande entre dans le CSW 4 et traitée. Une commande complète contenant des codes de paramètres de mode de rayonnement est produite dans CVS 4. Selon le pneu total 3, cette commande est transmise au dispositif générateur 12 (21, 23), où la formation d'un puissant signal d'impulsion du rayonnement fournie à l'antenne 9, 10, 11 (19, 20.22) est générée.
Lors du fonctionnement du combiné en mode actif, en raison de la commande électronique des antennes dans chacune des antennes 9, 10 et 11, l'une des rayons de son HN a une largeur suffisante pour une capture certaine de la cible d'escorte et scanne le coin dans le secteur spécifié du travail de cette antenne. Dans le cas de la présence dans ce secteur, ces derniers sont détectés par le faisceau de balayage et sont transmis au support. Dans le même temps, la numérisation de la poutre "Recherche" n'est pas interrompue, mais un faisceau HN supplémentaire est formé, orienté vers la cible nouvellement découverte. Ce rayon est accompagné du but nouvellement découvert. Sa largeur dépend de la plage de la cible, de sa taille et de sa vitesse de mouvement dans la direction perpendiculaire à la direction "sous-marin - cible". Cette largeur est définie pratiquement. Il devrait être le minimum possible, mais suffisant pour accompagnement confiant de l'objectif. Avec l'avènement de chaque nouvel objectif dans la nouvelle direction, le processus décrit est répété et une autre HN de l'antenne est formée, qui est établie sur le maintien de cette fin. Ce processus sera répété jusqu'à ce que tous les objectifs qui se trouvent dans le domaine de la responsabilité de l'antenne ne soient pas accompagnés des rayons correspondants de l'antenne HN.
Ainsi, lors du fonctionnement du chemin de la main, le rayonnement du signal de sondage est effectué par plusieurs faisceaux étroits (le nombre de rayons par unité dépasse le nombre d'objectifs et si les fins sont dans une direction, elle est encore moins). . Ce complexe proposé diffère de manière significative du prototype dans lequel le contrôle des antennes du tractus GL. Dans la ligne manuelle du prototype, la largeur de la HN de chacune des antennes devrait être au moins la largeur du secteur de la responsabilité de l'antenne, autrement en termes de ce secteur, l'objectif ne peut pas être détecté du tout.
Dans le prototype en mode HL, le rayonnement du signal de sondage est effectué en continu tout au long du secteur de la responsabilité des antennes. Ce rayonnement peut donc être détecté dans n'importe quelle direction. Dans le GAA proposé dans la plupart des cas dans la plupart du secteur exploratoire, le rayonnement est manquant ou effectué avec de grandes interruptions. Cela réduit considérablement la probabilité de détection de rayonnement et de déterminer les coordonnées de sa source lors de l'utilisation du gaz proposé par rapport au prototype.
De plus, la «recherche» dans le gaz proposé a un JN plutôt étroit, ce qui vous permet de concentrer toute l'énergie du dispositif générateur dans le secteur étroit dans lequel il existe un objectif irradié, ce qui équivaut à une augmentation de La puissance de la cible de signal comparée au prototype, où la largeur de l'antenne est grande et la majeure partie de l'énergie émise passe par l'objectif irradié.
Une augmentation de la puissance de la cible de signal conduit à une augmentation de sa plage de détection.
Ainsi, l'écart proposé fournit une augmentation de la sécurité du complexe et de la plage de détection de la cible au mode de la cheminée par rapport au prototype.
Le gaz inventif est assez facile à mettre en œuvre. Les antennes du tractus GL peuvent être mises en œuvre conformément aux recommandations données dans le livre [L.K. Samoilov. Contrôle électronique des caractéristiques d'orientation des antennes. - L.: La construction navale. - 1987]. Les dispositifs restants peuvent être effectués en tant que périphériques de prototype correspondants.
Le complexe hydroacoustique du sous-marin contenant le trajet du silence principal, le trajet d'un silence supplémentaire, le chemin de détection des signaux hydroacoustiques, le chemin d'hydrolyclisation, le tract de la communication et de l'identification, du chemin du ministère et de la détection des obstacles de la navigation, Le système d'informatique central, l'affichage, l'enregistrement, la documentation, le système de contrôle et le pneu total, dans ce cas, l'équipement du système d'affichage, l'enregistrement, la documentation et le contrôle sont en suppression à deux dimensions avec des périphériques connectés et sont connectés au système d'informatique central, le chemin de détection principale du bruit contient l'antenne de réception nasale principale, configurée pour former une caractéristique de mise au point statique dans des plans horizontaux et verticaux, et le premier dispositif de pré-traitement placé dans la capsule à l'intérieur de l'antenne et connecté directement au sortie de l'antenne et la sortie - à travers le pneu total au centre ALLEN Système informatique et système d'affichage, enregistrement, documentation et contrôle, le chemin de la détection de signaux hydroacoustiques contient la première antenne placée dans la partie nasale de la clôture de la découpe et ayant une caractéristique multi-traitement de l'orientation, la deuxième antenne placée Dans la partie d'alimentation de la clôture de la découpe et constitue une troisième antenne haute fréquence et omnidirectionnelle dont les blocs sont placés dans la coordonnée du nez, dans la partie d'alimentation de la clôture de la découpe et sur les côtés du sous-marin, qui est large bande, et le deuxième dispositif de pré-traitement, dont les entrées de signal sont connectées directement aux sorties des antennes correspondantes du chemin de détection des signaux hydroacoustiques et de l'entrée de commande et de la sortie - à travers le total du pneu avec le système de calcul central et Le système d'affichage, l'enregistrement, la documentation et le système de contrôle, le chemin d'hydrolection contient une antenne émettrice nasale esclave, placée dans la partie nez de la clôture de la coupe, deux émetteurs à bord Antennes placées sur les deux planches du sous-marin et le premier dispositif générateur, dont les sorties sont connectées aux entrées de signal des antennes de rayonnement correspondantes du trajet d'hydrolyclisation et de l'entrée de commande - à travers le bus total avec le système de calcul central et Le système d'affichage, l'enregistrement, la documentation et la gestion, le chemin de communication et l'identification contiennent une antenne rayonnante nasale placée dans un coordinateur de nez, une antenne rayonnante d'alimentation, placée dans la clôture de la coupe et le deuxième dispositif générateur, dont les sorties sont connecté aux entrées de signal des antennes émettrices du trajet de communication et de l'identification, ainsi que l'entrée de contrôle - via un pneu total au système de calcul central et le système d'affichage, l'enregistrement, la documentation et la gestion, la voie du ministère et la détection des obstacles de la navigation contient une antenne émetteur-récepteur, réalisée avec la possibilité de rotation des caractéristiques d'orientation dans le plan vertical et placé dans le carénage nasal, le troisième générateur Dispositif d'ouverture, dont la sortie est connectée à la sortie d'entrée de l'antenne du chemin Ministand et la détection des obstacles de navigation via le commutateur "REÇU - Transmission" et l'entrée de commande - via le bus total avec le système d'informatique central et le système d'affichage, l'enregistrement, la documentation et le contrôle et le troisième traitement de périphérique préliminaire, dont l'entrée est connectée directement à la sortie de l'antenne émetteur-récepteur, et la sortie est via un bus total avec un système de calcul central et le système d'affichage , enregistrement, documentation et contrôle, la trajectoire de détection de bruit supplémentaire contient une antenne remorquée étendue flexible, à travers le câble-câble et le dispositif de collecteur de courant connecté à l'entrée le quatrième dispositif de pré-traitement relié par sa sortie via un pneu Système d'informatique central et système d'affichage, enregistrement, documentation et contrôle, caractérisé en ce que toutes les antennes rayonnantes du chemin d'hydrolection sont effectuées Les ONG contrôlées à la fois par le nombre de rayons caractéristiques des caractéristiques d'orientation et leur largeur et leur direction, tandis que les entrées de commande de ces antennes via le bus total sont connectées au système de calcul central et au système d'affichage, enregistrement, documentation et contrôle, le nombre des rayons des caractéristiques de référence de chacune des antennes par unité plus que le nombre d'accompagné de ces objectifs d'antenne, et leur largeur est minimale possible, mais suffisante pour capture et accompagnement confiant de la cible, avec l'un des rayons de l'orientation. Caractéristiques de l'épreuve Les rayons restants d'antenne caractéristiques d'orientation sont accompagnés de cette cible d'antenne.
Brevets similaires:
L'invention concerne des stations de boisson sonore (complexes produits sonores) et peut être utilisé pour déterminer l'élimination de la source sonore (à partir de) à partir d'un localisateur acoustique, de son angle de production de son corrigé et de ses coordonnées topographiques (TC).
Dispositif de détection de signaux et de déterminer la direction à leur source. Le résultat technique de l'invention est de créer un nouveau dispositif permettant de détecter des signaux et de déterminer la direction à leur source (sources) avec le nombre d'opérations non linéaires dans le trajet de traitement, égal à 2.
L'invention concerne le domaine de l'hydroacoustique. Entité: Dans la méthode de détermination de la direction au phare hydroacoustique, le défendeur dans des conditions de propagation de trajets multiples du signal de navigation Détermine la direction simultanée dans les plans horizontaux et verticaux au répondant d'une future hydroacoustique en recevant le tableau de l'antenne Beacon-intimée, Renfort du signal reçu par des pré-amplificateurs connectés à la sortie de chaque réseau d'antennes de convertisseur, numérisation avec fréquence d'échantillonnage FS.
L'invention concerne des techniques de test et peut être utilisée dans des tests intrinsèques d'objets sous-marins. Le résultat technique est une diminution de l'erreur de déterminer les coordonnées du positionnement et des angles d'orientation de l'objet de positionnement dans l'espace du polygone mobile.
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé dans l'hydrolytique passive, ainsi que dans l'acoustique atmosphérique et le radar passif. Le résultat technique atteint consiste à garantir l'observation visuelle des sources de rayonnement sur l'écran de l'indicateur, leur emplacement directement dans les coordonnées souhaitées du champ d'observation "Gamme de direction" avec la détermination de leurs coordonnées sur les échelles de champ indicateur à l'immunité de bruit maximale, réalisable dans ce système de réception et une augmentation limitée de traitement et de calcul augmente les coûts.
Utilisation: dans le radar, les communications radio et l'astronomie radio. Entité: le détecteur de corrélation des signaux contient un présent tableau de dispersion (cadeau) fabriqué d'une certaine manière, qui inclut N de transducteurs électroacoustiques passifs non écoutés et m de transducteurs passives actifs, correspondant aux canaux de transmission du canal, un contrôle caractéristique de rayonnement Unité, l'unité de calcul des éléments de coordonnées relatives du cadeau, du seuil, de la solution faisant de la calculatrice de seuil, de l'indicateur, des éléments passives actifs du cadeau, ainsi que des caractéristiques d'acteur de corrélation avec un délai de retard des signaux.
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé pour détecter l'objet dans l'environnement marin et la mesure de la coordonnée. Le résultat technique de l'utilisation de l'invention consiste à mesurer la distance à l'objet de réflexion à une période inconnue de rayonnement et le lieu de production, ce qui augmente l'efficacité de l'utilisation d'agents hydroacoustiques. Pour atteindre ce résultat technique, un signal explosif est rayonné dans l'environnement marin, recevant le signal réfléchi par un récepteur à large bande, une analyse de fréquence multicanaux du signal réfléchi, la mappage sur l'indicateur de spectres de la sortie du canal, produise une installation autonome et une sapeur La source du signal explosif, mesurez la dépendance de la vitesse du son de la profondeur, mesurée le niveau d'interférence dans la bande de réception est déterminée par le seuil de détection, recevez un signal de propagation de signal ressemblant en avant, qui dépassait le seuil de détection sélectionné, déterminez la heure de réception du signal de propagation avant de la source explosive au récepteur TPRRAM, mesurez le spectre du signal de propagation avant, qui dépassait le seuil de détection, déterminez la propagation directe de la largeur du spectre de signal dans la bande de périphérique de réception, le signal reflété de la Objet, déterminez le temps de réception du signal TAHO réfléchi, mesurez le spectre du signal réfléchi, déterminez la bande de compact spectral Le signal reflété par AVLEE dépassait le seuil de détection FAKHO détermine la distance à l'objet par la formule Démentralisée \u003d k (Fprram-Fac), où K est un coefficient qui détermine l'atténuation de la fréquence du spectre de signal lors de la distribution, avec le DISP\u003e (TechO- TPRIM) avec, où - vitesse sonore. 1 il.
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé pour construire des systèmes pour la détection de signaux de sondage d'hydrolytateurs installés sur un support mobile. Le résultat technique de l'utilisation de l'invention consiste à assurer la possibilité de déterminer la variation de l'angle de vitesse du mouvement de la source du signal de sonde, la vitesse change dans la direction de son mouvement. Pour atteindre le résultat technique spécifié, une réception séquentielle des signaux de sondage de la source de déménagement est sélectionnée, déterminant le temps de l'arrivée du premier signal de détection reçu, caractérisé en ce que de nouvelles opérations ont été introduites, à savoir: les moments du temps TI recevoir une autre n du signal de sondage, où n n'est pas moins 3, déterminez l'intervalle de temps TK entre les moments de l'arrivée de chaque deux les autres des signaux de sondage TK \u003d TI + 1-TI, déterminez la différence entre les mesures mesurées. intervalles de temps ΔTM \u003d TK + 1-TK, où M est le numéro de mesure d'intervalles de temps séquentiels, déterminez la différence d'intervalle de temps, rappelez-vous la différence d'intervalle de première fois, déterminez la différence d'intervalle de temps suivante, si la différence d'intervalle a un signe négatif , Déterminez le cosinus de l'angle de mouvement du cours de la source, comme le rapport de chaque différence ultérieure à la première différence d'intervalle de la première fois, déterminez le cours La source de la source des signaux de sondage, comme la valeur inverse cosinus de la relation mesurée, si la valeur mesurée de la différence est positive, la source des signaux de sondage est éliminée et le cosinus de l'angle est calculé en tant que le ratio de la première différence à chaque ultérieurement. 1 z.p. F-mensonges, 1 YL.
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé dans les tâches de déterminer la classe d'objet lors du développement de systèmes hydroacoustiques. La classification des signaux hydroacoustiques d'émission de bruit de l'objet marin est proposée, qui comprend le signal d'antenne de réception d'émission de bruit de l'objet marin dans le mélange additif avec une interférence de l'antenne hydroacoustique, la conversion de signal en une vue numérique, traitement spectral de Signaux reçus, accumulation des spectres obtenus, lissage du spectre par fréquence, détermination du seuil de détection basé sur les fausses alarmes de probabilité et lorsque le seuil de détection du spectre actuel est dépassé à cette fréquence de décision sur la présence d'une composante discrète, Selon lesquels l'objet marin est classé, dans lequel les signaux de l'objet marin dans le mélange additif avec une interférence sont prélevés par deux semi-adhésifs de l'antenne hydroacoustique, le traitement spectral des signaux reçus est produit aux séities du semi. -Tentene Les spectres de puissance aux sorties de deux semi -tupes sont résumés, déterminant le spectre total de puissance S σ 2 (k), trouvez la différence S δ 2 (k) de spectres de puissance aux sorties de deux semi-bypand , différence déterminée S 2 (k) σ - δ ¯ \u003d s σ 2 (Ω k) ¯ - s δ 2 (k) ¯ - s δ 2 (k) ¯ - le spectre de puissance des émissions de bruit de l'objet marin, et La présence de composants discrets est jugée par les émissions de bruit de seuil de détection de fréquence de l'objet marin. Cela garantit l'élimination de l'effet du spectre d'interférence prélevé par le champ latéral caractéristique de la direction de l'antenne hydroacoustique et de la définition correcte des signes spectraux de classification. 1 il.
L'invention concerne un radar, en particulier des dispositifs permettant de déterminer les coordonnées des objets émettant des signaux acoustiques, à l'aide de capteurs à fibres optiques séparés géographiquement - des compteurs de pression acoustique. Le résultat technique est une augmentation de la précision de la détermination de l'emplacement et de la reconnaissance du type d'objet en estimant la composition spectrale de ses paramètres de bruit et de mouvement acoustiques. Le résultat technique est obtenu en introduisant une seconde boucle pour transmettre des impulsions optiques d'une autre longueur d'onde et une chaîne séquentielle de nœuds: (2n + 3) - Guide de la lumière, la troisième FPU, le second générateur d'impulsions, la seconde source de rayonnement optique, ( 2n + 4) -ème fibre. 1 il.
L'invention concerne le domaine de l'hydroacoustique et est destiné à déterminer les paramètres du bruit des objets dans la mer. Enquêter sur le signal hydroacoustique de bruit de l'objet marin, en comparant avec un signal de prévision, formé dynamiquement pour la combinaison du bruit allégué de l'objet et des distances à l'objet en déterminant le coefficient de corrélation. Au maximum, la fonction de la dépendance du coefficient de corrélation sur le bruit prévu de l'objet et de la distance estimée à l'objet détermine conjointement l'évaluation du bruit de l'objet et estimer la distance à l'objet. Le résultat technique de l'invention est d'augmenter la précision de l'estimation du bruit d'objet avec une diminution simultanée du nombre total d'opérations arithmétiques lors des évaluations du bruit de l'objet et de la distance à l'objet. 2 il.
L'invention concerne des retards acoustiques (AP), des localisateurs acoustiques (AL) et peuvent être utilisés pour déterminer le roulement de la source sonore (à partir de). L'objectif de l'invention est d'augmenter la précision de la direction de la découverte des surfaces de la terre inclinées au plan d'horizon, où l'antenne acoustique est située et réduisant le temps nécessaire à la définition du roulement de cette source. Belayer de B. cette méthode Défini comme suit: Mesurez la température de l'air, la vitesse du vent, l'angle directionnel de sa direction dans la couche de surface de l'atmosphère et les introduisez à la machine de calcul électronique, décrite par la carte topographique de l'attention particulière (fossé), où des positions de feu et Les mortiers peuvent être placés sur le sol une plate-forme plate d'environ une forme rectangulaire pendant une longueur d'au moins trois cents mètres et une largeur d'au moins dix mètres, dont les grands côtés seraient grossièrement perpendiculaires à la direction du centre approximatif. du fossé, mesurez l'angle d'inclinaison de ce site dans le plan de l'horizon et en tenant compte de cet angle à l'aide du dispositif mécanique optique et du rail de réglage, définissez le RCP de manière particulière sur le sol, prenez des signaux acoustiques et les interférences, les transformer en signaux et interférences électriques, sont traitées dans des canaux 1 et 2 pour traiter les signaux AP ou Al, déterminé à la sortie de ces canaux les tensions constantes U1 et U2, qui ne sont venues que du fossé, déduites de la tension de la tension U1. U2, pliez ces tensions, faites la différence entre la somme de ηCr et automatiquement en fonction du programme, une véritable roulement de la source sonore α est calculée. 8 ans
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé dans le développement de systèmes de détermination de coordonnées en fonction du trajet de la réduction du bruit des complexes hydroacoustiques. Le procédé comprend la réception d'un signal de bruit hydroacoustique de l'antenne hydroacoustique, en maintenant la cible en mode sans bruit, analyse spectrale du signal de bruit hydroacoustique dans une bande de fréquences large, la détermination de la distance à la cible, la réception du signal de bruit hydroacoustique est générée. de la moitié de l'antenne hydroacoustique, mesurez le spectre mutuel entre les signaux de bruit hydroacoustique pris la moitié des antennes hydroacoustiques; Mesurer la fonction d'autocorrélation de ce spectre mutuel (ACF); La fréquence porteuse du FISM de fonction d'autocorrélation est mesurée, la différence entre la fréquence de porteuse mesurée et la fréquence de support de référence du signal d'émission de bruit est la cible du fétatallone mesurée à une basse distance (fétalon-fisme) et la distance à la La cible est déterminée par la formule D \u003d (fétalon-fisme) K, où K le coefficient de proportionnalité calculé comme le rapport des modifications de la fréquence de support de la fonction d'autocorrélation par unité de détermination de la fréquence de référence. 1 il.
Les inventions concernent le domaine de l'hydroacoustique et peuvent être utilisées pour contrôler le niveau d'émission de bruit de l'objet sous-marin dans l'invention du réservoir. Le résultat technique obtenu à partir de l'introduction d'inventions consiste à obtenir la possibilité de mesurer le niveau de bruit du flotteur sous-marin directement de la fossilité elle-même. Ce résultat technique est obtenu par le fait que le ou les module (s) équipés d'hydrophones, augmentent le module de mesure (IM) et le niveau d'émission de bruit est mesuré en l'utilisant. Il est équipé d'un système de vérification de ses performances sans démonter le dispositif. 2n. et 11 z.p. F-ls, 3 ans.
L'appareil (100) pour résoudre l'ambiguïté de l'estimation (105) DOA (φ ^ AMB) contient un analyseur (110) des estimations de la DOA pour analyser l'estimation (105) DOA (φ ^ AMB) pour obtenir un ensemble (115) de paramètres d'analyse ambiguë (~ i ... ~ n; f (~ i) ... f (~ n); Fenh, i (^ ^ amb) ... Fenh, n (^ ^ Amb); gp (φ ~ i). .. φ ~ n); d (~ i) ... d (~ n)) en utilisant des informations (101) du déplacement et des informations (101) de la Le déplacement est le rapport (φ ^ ↔φ) entre les personnes déplacées (φ) et une estimation non formée de la DOA () et du bloc (120) de l'autorisation d'ambiguïté pour résoudre l'ambiguïté dans l'ensemble (115) des paramètres d'analyse ambigus ( ~ ~ I ... ~ N; F (~ ~ I) ... F (φ ~ N); Fenh, i (^ ^ Amb) ... Fenh, n (^ ^ amb); GP (φ ~ ~ i) ... GP (φ ~ n); D (φ ~ i) ..d (~ n)) Pour obtenir un paramètre autorisé sans ambiguïté (~ Res; Fres, 125). 3n. et 12 zp F-li, 22 yl.
L'invention concerne le domaine de l'hydroacoustique et peut être utilisé comme une armement hydromoustique des sous-marins de diverses fins, ainsi que lors de travaux géologiques et hydroacoustiques sous-marins. Le complexe comprend les chemins de la réduction de bruit principale et supplémentaire, le trajet de détection de signal hydroacoustique, le chemin d'hydrolyclisation, le chemin de communication et le chemin d'identité, le chemin du ministère et la détection des obstacles de la navigation, le système d'informatique central, le système d'affichage, l'enregistrement, Documentation et contrôle et le pneu total. Dans ce cas, toutes les antennes rayonnantes du trajet d'hydrolection sont contrôlées électroniquement par le nombre de faisceaux des caractéristiques d'orientation et de leur largeur et de leur direction. Le chemin d'élimination principale du bruit contient l'antenne de réception nasale principale et le premier dispositif de pré-traitement. Le trajet de détection des signaux hydroacoustiques contient trois antennes de réception et le deuxième dispositif de pré-traitement. Le chemin d'hydrolection contient trois antennes commandées électroniquement et le premier dispositif générateur. Le chemin de communication et l'identification contiennent deux antennes rayonnantes et le deuxième dispositif générateur. MINISTAND MINISTAND ET DÉVELOPPEMENT DISTRIBUTION DES ANNENNES CONSTRUITES, LE TRANSFERT DE TRANSFERTURE, UN DÉPARTEMENT DE GÉNÉRATIVEMENT ET DE LA DIRECTURE DE PRÉ-TRAITEMENT. Le tract de la réduction de bruit supplémentaire contient une antenne remorquée étendue flexible, un câble de câble, un dispositif de collecteur de courant et un quatrième dispositif de pré-traitement. Résultat technique: Améliorer le fonctionnement du fonctionnement du gaz et la plage de détection des cibles en mode GL. 1 il.
Chapitre 1. Analyse des principales méthodes de détermination de l'emplacement de la source de signaux de navigation avec des perles ultra-threads.
1.1. Fixer le problème du développement d'un complexe de navigation hydroacoustique.
1.1.1. Expérience de l'IPMT dans le développement des systèmes de navigation de régime.
1.1.2. Les tâches de développement de Hans-Uch.
1.2. Méthodes d'amplitude pour déterminer les informations d'éclairage avec des antennes de petite taille (ultra-proposition).
1.2.1. Antenne équidistante linéaire.
1.2.2. Antenne équidistante circulaire.
1.2.3. Possibilité de faire face avec précision les retards d'amplitude.
1.3. Sur la mesure du déphasage du déphasage de la MESVD deux signaux tonaux, du bruit déformé.
1.4. Direction de phase estimée Recherche de formules dans des systèmes avec des antennes de configuration simples.
1.4.1. Récepteur d'élément de baie.
1.4.2. Récepteur à quatre éléments.
1.4.3. Délai de phase à six canaux.
1.5 Le procédé d'appauvrissement de la source de signaux de navigation à l'aide d'antennes discrètes circulaires avec un grand nombre d'éléments.
1.5.1. La sortie des formules estimées et l'évaluation de l'erreur du delier UB avec une base circulaire.
1.5.2. Les algorithmes de recherche de direction pour la direction de la direction avec une base circulaire, en tenant compte des modifications de l'orientation de l'antenne d'angle.
1.6. Résultats.
Chapitre 2. Traitement statistique d'informations sur le système de navigation hydroacoustique avec une base ultra-ardente.
2.1. Résoudre la tâche de la couche de couche basée sur des méthodes de traitement statistique.
2.2. Équations de couche pour les antennes multi-éléments de différentes configurations.
2.2.1. Antenne multi-éléments linéaire.
2.2.2. Antenne avec un nombre arbitraire d'éléments sur une base de données circulaire.
2.2.3. Antenne à quatre éléments.
2.2.4. Antenne circulaire avec un élément supplémentaire au centre.
2.2.5. Antenne à deux cabines.
2.2.6. Résultats.
2.3. Caractéristiques du traitement de beaucoup de signal de navigation de fréquence.
2.4. Configuration de l'antenne et évaluation de précision potentielle.
2.4.1. Antennes avec une distance de demi-onde entre les éléments.
2.4.2. Antennes réécrites.
2.4.3. Sélectionnez le secteur de la révision basé sur l'antenne phase.
2.5 Résultats.
Chapitre 3. Méthodologie pour évaluer la précision des systèmes de navigation avec une base ultra-vis.
3.1. Évaluation de la composante systématique de l'erreur de la définition du roulement.
3.1.1. Fonction de phase d'une antenne de réception multi-éléments imparfaite.
3.1.2. Développement d'équipements pour la certification métrologique de recevoir des antennes multi-éléments.
3.1.3. Études expérimentales de la précision des antennes dans des conditions de laboratoire.
3.2. Estimations de la précision du Finder de direction à large bande (étude des caractéristiques de l'antenne pour traiter un signal de navigation multi-fréquences).
3.3. Études expérimentales des principales caractéristiques du système de navigation de base ultra-circuit dans les conditions d'une petite mer.
3.3.1. La méthode de certification du système en comparant avec les données du système de navigation certifié (sur l'exemple de HANS-DB).
3.3.2. Méthodes d'évaluation de la précision des mesures angulaires par des données de réglage.
3.3.3. Méthode de remise des diplômes du système de navigation de base ultra-tension dans des conditions à grande échelle à l'aide de la balise de référence.
3.3.4. Justification métrologique pour l'obtention du diplôme du système de navigation de base ultra-tension selon Hans DB et GPS.
3.4. Évaluation des caractéristiques métrologiques de HANS-UBB sous la mer profonde.
3.5 Résultats.
Chapitre 4. Méthodes de construction et de développement des principaux éléments du système de communication hydroacoustique de l'appareil sous-marin. 146 4.1. L'approche générale de l'évaluation des principaux paramètres du Gass pour l'ANCA.
4.1.1. Général.
4.1.2. Sur la structure du symbole d'information.
4.1.3. Sur la synchronisation.
4.1.4. Sur la sélection de l'impulsion pour évaluer les caractéristiques du canal de communication.
4.1.5. Traitement du bloc de données.
4.1.6. Modélisation numérique du canal de communication. 153 4.2.0 Développement de piézopraverteurs à large bande et d'antennes pour Gass.
4.2.1. Piézo-méthodes cylindriques à large bande.
4.2.2. Piézopravertisseurs cylindriques avec caractéristiques contrôlables
4.2.3. Type de piston à large bande Piézo-formers.
4.2.4. Sur la correspondance électrique des piézopraverteurs dans une large bande de fréquences.
4.2.5. Sur l'efficacité énergétique des transducteurs à large bande.
4.2.6. Caractéristiques des antennes développées.
4.3. Récepteur multi-éléments de signaux de gassement avec contrôle adaptatif de la HN en fonction du formateur de direction du système de navigation.
4.3.1. Traitement de l'information.
4.3.2. Caractéristiques de l'antenne UBB lors de la réception des signaux de système de communication.
4.4. Etude expérimentale du système de communication multi-fréquences non cohérent avec correction d'amplitude du rapport engrenage du canal.
4.4.1. Algorithme de traitement d'un signal multi-fréquences.
4.4.2. Régime structurel Systèmes de communication.
4.4.3. Études expérimentales des éléments du système de communication hydroacoustique dans les conditions d'une petite mer.
4.5. Résultats.
Chapitre 5. Développement du décalage Doppler dans le cadre du système de navigation intégré de l'appareil sous-marin.
5.1. Antennes.
5.2. Traitement spectral des signaux d'impulsion courts.
5.3. Structure et circuits.
5.4. Études étrangères sur les caractéristiques du décalage dans le cadre des ANCA.
5.5 Résultats.
Chapitre 6. Mise en œuvre technique et expérience de l'application pratique des moyens hydroacoustiques de navigation de robot sous-marin. 207 6.1. Mise en œuvre technique du système de navigation hydroacoustique avec une base ultra-vis.
6.1.1. Schéma structurel de HANS-UKB.
6.1.2. Caractéristiques du matériel de construction.
6.1.3. Système de navigation d'antenne de réception.
6.1.4. Traitement de l'information.
6.1.5. Interface utilisateur.
6.1.6. Logiciel.
6.1.7. Tests étrangers et exploitation pratique de HANS-UKB.
6.2. Caractéristiques Kit Equipment Gass.
6.2.1. Caractéristiques principales.
6.2.2. Principe d'opération.
6.2.3. Diagramme structurel du récepteur.
6.2.4. La structure du signal de gassement.
6.2.5. Les résultats des tests marins dans la mer profonde.
6.3. Complexe de navigation hydroacoustique.
6.3.1. La composition et le but du complexe de navigation du navire.
6.3.2. Propositions techniques pour le développement d'un système de navigation et de gestion combiné.
6.4. Tests complexes de la navigation hydroacoustique et de l'expérience dans leur utilisation pendant le travail réel.
6.4.1. Tests de navigation complexes.
6.4.2. Expérience d'utilisation pratique des outils de navigation hydromoustique lors de véritables moteurs de recherche.
Liste recommandée de mémoire
Développement de méthodes et d'algorithmes pour la navigation aller simple des sous-marins inhabités autonomes 2013, candidat des sciences techniques Dubrovin, Fedor Sergeevich
Méthodes de traitement de signaux hydroacoustiques reçus dans la zone des systèmes de réception et d'émission de Fresnel 2010, docteur en sciences techniques Kolmogorov, Vladimir Stepanovich
Sous l'eau et la navigation à l'aide d'un champ électromagnétique 2006, Docteur de sciences techniques Shibkov, Anatoly Nikolaevich
Méthodes et systèmes d'amélioration de la sécurité de la voile basée sur des dispositifs de navigation hydroacoustique avec une base linéaire de récepteurs directionnels 2006, docteur en sciences techniques ZavyLov, Viktor Valentinovich
Navigation de l'appareil sous-marin autonome à l'aide d'un système de navigation intériorial inerial 2017, candidat de Sciences physiques et mathématiques Filatova, Gusel Amirovna
Travaux de thèse similaires dans la spécialité "acoustique", 01.04.06 CIFRA VACC
Développement de la méthode d'augmentation de la précision du positionnement des objets sous-marins 2013, candidat des chefs de sciences techniques, Alexander Alexandrovich
Méthode paramétrique de transformation contrôlée des champs hydroacoustiques d'émission de bruit de la recherche et des navires de pêche, des méthodes et des systèmes de leur mesure basés sur des modèles acoustiques non linéaires 2002, candidat des sciences techniques Khaliulov, Fargat Amershanovich
Développement d'algorithmes de traitement d'informations dans des systèmes multi-titres en utilisant une analyse spectrale rapide des signaux 2005, candidat des sciences techniques Davletkaliyev, Kuanishevich romain
Méthodes et moyens de prise en charge de la navigation des aéronefs et du contrôle du trafic aérien basé sur les technologies satellites 2004, Docteur de sciences techniques Sleppchenko, Peter Mikhailovich
Théorie et procédés de conception de systèmes d'antenne ultra-large bande pour la basage hospitalier et mobile radio-large 2011, docteur de sciences techniques rebovsky, yuri anatolyevich
Conclusion de la thèse sur le sujet "Acoustics", Matvienko, Yuri Viktorovich
Principaux résultats:
1. Les principes de construction de systèmes ultra-pointillé ont été étudiés et une analyse des méthodes de base pour déterminer la position angulaire de la source de signaux de navigation tonale et à large bande lors des informations de traitement des antennes de réception de petite taille ont été étudiées.
Des expressions estimées ont été obtenues et la direction de la recherche des caractéristiques des retards d'amplitude avec le traitement total des données de différence ont été étudiées.
La faible précision potentielle des systèmes de configuration les plus simples contenant une, deux ou trois paires de récepteurs orthogonaux est notée avec les méthodes de traitement de données de phase et la nécessité de compliquer des systèmes d'accroître la précision est notée.
Procédé de direction de la direction de signaux tonaux basés sur l'utilisation d'antennes avec un grand nombre de récepteurs bien placés sur une base circulaire avec la définition de la phase cumulative est également proposé, dont l'erreur peut potentiellement être réduite à 0,1gradus.
Les formules calculées et sur l'exemple d'antennes circulaires avec un grand nombre d'éléments sont montrés la connexion des données du capteur de cours, du rouleau et du différentiel et leurs erreurs sur la valeur des paramètres de navigation mesurés et de leurs erreurs.
Sur la base de la méthode de véridium maximale, la tâche de traitement statistique des données de navigation a été résolue lors de l'utilisation des antennes discrètes de la configuration arbitraire. Dans ce cas, l'évaluation des paramètres souhaités est déterminée par traitement articulaire de toutes les paires de canaux prises avec différentes échelles. Les coefficients de pondération contiennent en tant que composant géométrique égal à la dérivée de la fonction de phase en fonction du paramètre mesuré et de l'énergie égale au signal signal à action dans le canal.
Les relations estimées sont dérivées pour la définition de la roulement et l'erreur d'amortissement pour un certain nombre de configurations d'antenne les plus courantes: linéaire, circulaire, combinée.
Une direction de phase Finder a été développée sur la base de l'utilisation d'antennes circulaires d'une grande taille d'onde avec un nombre limité d'éléments.
La technologie de réduction du nombre de canaux de traitement avec la préservation de la résolution angulaire est étayée en séparant la procédure de couche en deux étapes: la direction grossière constatée pour déterminer le secteur de la visualisation et la solution exacte de l'équation de roulement à une approximation initiale donnée.
La possibilité d'autoriser les ambiguïtés de phase découlant lors de l'exploitation d'antennes rares par les méthodes de découverte de la direction d'amplitude était justifiée.
Théoriquement étatit la réalisation de la résolution angulaire de 0,1 à 0,2 degrés avec le nombre de canaux 6-8 et la taille de la vague de l'antenne 3-5 des longueurs d'onde de la fréquence de navigation.
Relations pour calculer le roulement d'une antenne discrète de petite taille, le temps de propagation du signal acoustique sur l'ouverture dont la fréquence est comparable à la fréquence moyenne du spectre reçu.
2. Méthodes de recherche pour évaluer l'exactitude de la précision HANS UKB et des méthodes développées pour mesurer leurs caractéristiques dans les conditions de laboratoire et d'outils.
Pour décrire une antenne multi-éléments discrète, une fonction de vecteur a été proposée, dont chaque composant décrit l'élément dédié de la dépendance de l'antenne de la phase du signal acoustique de la direction de son arrivée. La définition exacte (expérimentale) de la fonction est obligatoire lors de la résolution de la tâche de retarder l'objet de navigation.
Un support pour la certification des antennes multi-éléments, qui est installé dans un bassin hydroacoustique spécialisé et comprend une source de signaux réglables et un système de réception avec une plate-forme rotative de précision et un équipement de mesure de phase multicanal pour des signaux de type à impulsions radio.
Une technologie de certification d'antenne a été développée, qui consiste à mesurer expérimentalement la fonction de phase de l'antenne, la détermination des fonctions analytiques qui se rapprochent des données obtenues et l'utilisation d'eux en résolvant les équations de recherche de direction, avec la tabulation de la différence de L'origine du roulement et de sa valeur (installation) vraie sous la forme d'une évaluation de la composante systématique de l'erreur.
Les antennes de réception multi-éléments pour des échantillons actifs de systèmes sont développées et étudiées, qui fournissent la valeur d'une erreur systématique autour de 0,5 ARADUS.
Une analyse comparative des travaux de Hans DB et UBB dans les conditions d'une petite mer avec une installation fixe de l'antenne de réception ACB est effectuée.
Analysé la méthode d'estimation des mesures angulaires relatifs basées sur le traitement des données de régie.
La méthode de certification du système UCB dans la petite mer à l'aide de la balise de référence basée sur le traitement des données de régie est étayée. Il est montré qu'avec l'erreur relative de mesurer la plage, quelques-uns pourcentage de dixièmes, une erreur de la valeur de conception de la roulement pour Annea, qui rend le mouvement autour de l'ukb - antenne et un phare sur une trajectoire fermée, ne dépasse pas d'un degré .
Une analyse a été effectuée et les caractéristiques de précision du système UCB basées sur les résultats du travail dans les conditions de la mer profonde ont été déterminées. En tant que données de référence, les données DB HANS ont été utilisées, le système de navigation intégré et le capteur de profondeur, les données de régie. La faisabilité de l'analyse de la variabilité différentielle des données de régie pour identifier des fragments individuels de la trajectoire de mouvement ANPA et la possibilité d'une moyenne raisonnable de données angulaires avec le traitement de trajectoire sont indiqués. À la suite de l'analyse, la conclusion est justifiée par l'erreur de mesures angulaires d'environ 0,5.
La technique d'élimination des ambiguïtés de phase résultant de l'augmentation de la taille de la base de mesure est étayée et testée expérimentalement par le traitement statistique des signaux multi-fréquences.
L'antenne de réception multi-éléments et l'équipement du rayonnement (réception) des signaux complexes ont été développées et étudiées expérimentalement, des estimations de l'erreur système ont été faites, qui constituent les dixièmes de la grêle.
3. Les méthodes sont étudiées et des moyens d'un système de transmission d'informations à grande vitesse pour le canal hydroacoustique de la planche d'AcrePa à la fourniture de navire.
Des études sur la construction de convertisseurs piézo-larges ont été développées et spécialisées de convertisseurs cylindriques et de tiges ont été développés avec des caractéristiques d'orientation spéciales conçues pour fonctionner dans des équipements de système de communication: un convertisseur cylindrique hautement efficace a été proposé avec une bande passante à trois octaves à l'aide de couches assorties minces de la corne configuration, qui répond aux exigences de travail dans une petite mer; Une variété de convertisseurs de résonance est proposée pour le rayonnement et la réception de signaux multisfréquences, fabriqué sous la forme d'un ensemble de piézocylinders coaxiaux; Les pistons piézopraverteurs sont proposés avec un type à un côté HN pour fonctionner dans un canal de propagation de signal vertical.
Analysé la structure du système de transmission de données pour le canal de communication multiplié avec l'adaptation du circuit de traitement via le bloc de données de la longueur finale. La transmission du bloc d'informations est précédée de la procédure de réglage des paramètres du récepteur, la taille du bloc temporaire est déterminée par l'état actuel du canal de communication. Les procédés de modélisation numérique ont analysé les caractéristiques de la sélection des signaux connectés et indique l'opportunité d'utiliser le signal à la manipulation de phase et de fréquence combinée.
Une méthodologie d'estimation des caractéristiques d'impulsion du canal de communication et de raffinement du moment de la synchronisation en transmettant et en traitement une série d'impulsions de la phase alternative est proposée.
Un diagramme de signaux de système de signalisation de réception d'une antenne de navigation multi-éléments avec la réalisation du filtrage spatial du faisceau direct dans les conditions de la distribution de multiples sur la base de données sur la position angulaire de la source des signaux et des interférences reçues lors du fonctionnement de Hans UKB est proposé.
Des études ont été apportées et justifiées la possibilité de transmettre des informations dans un canal de communication multi-fréquences avec un alignement préliminaire de la réponse en fréquence d'amplitude du canal et de la sélection du message de courant sur la base d'une analyse comparative de l'énergie dans chaque canal de fréquence. Des études expérimentales d'un tel système de traitement dans une très petite mer ont confirmé la possibilité d'utiliser des équipements pour transmettre des images graphiques à une vitesse d'environ 3000 bits / s à une faible probabilité d'erreurs.
4. Pour la navigation embarquée, le robot sous-marin est conçu et intégré au galage complexe Doppler.
Des études complétées et développées des antennes de décalage spécialisées avec une sensibilité élevée de l'écho obtenue en raison de la coordination mécanique acoustonique optimale des méthodes piézo-antennes avec un environnement de travail.
Pour augmenter la vitesse du décalage, une méthode de traitement spectral des signaux d'impulsions courtes est proposée et mise en œuvre, fournissant une résolution élevée en fréquence due à la formation de longues implémentations quasi-cohérentes de signaux réfléchis. La méthode vous permet de déterminer les composants de vitesse avec la dispersion minimale en une seconde.
Conçu et utilisé dans le cadre de l'échantillon expérimental d'ANPA Doppler Doppler
Une technique de graduation du décalage dans des conditions à grande échelle a été développée en calculant la vitesse de l'ANPA sur la gamme de données de recherche de HANS.
5. Conçu, testé et testé dans des opérations réelles Un complexe de navigation hydroacoustique, qui assure la formation d'une image d'information de navigation du mouvement de la mission à bord de la fourniture de navires et de l'ANCA, composé d'outils de navigation hydromoustique, de transmission d'informations et de mesure absolus la vitesse.
Conçu, testé dans une mer petite et profonde et intégré dans le complexe de navigation du Hans UKB, qui comprend: une source synchronisée du signal de navigation sur l'installation, un complexe de traitement de navire avec une antenne de réception sur un câble câble, un récepteur GPS. Le système présente les caractéristiques suivantes: plage - 6-10 km; L'erreur de mesure du roulement est inférieure à 1 degrés; L'erreur de mesure limite est de 0,5%. Confirmé expérimentalement la possibilité de faire fonctionner le système dans la position de la position de l'ANCA, qui effectue une longue transition le long de l'objet étendu avec le mouvement de la fourniture de la fourniture et remorquant l'antenne de réception à une vitesse maximale de 5 nœuds.
Conçu, testé et utilisé dans le cadre d'un appareil caché, un système haute fréquence de navigation UKB avec l'emplacement de la source à bord du navire et le récepteur sur la machine.
Conçu et testé dans la composition des moyens hydroacoustiques de navigation et de support d'information, un équipement de transmission d'équipement APA pour le contrôle opérationnel de l'état de surveillance et de recherche des travaux dans les conditions de la mer profonde et du canal de communication verticale. L'équipement fournit une transmission de données à une vitesse de 4000bit / s, avec une probabilité d'erreurs d'environ un pour cent, ce qui garantit la transmission des cadres d'image pour 45c.
Conçu, testé et intégré dans le système de navigation à bord Doppler Doppler, fournissant la mesure de la vitesse absolue de l'ANCA dans la plage de vitesses 0-2M / S avec une erreur de 1-2 cm / s.
La technologie d'application du complexe de navigation est proposée:
HANS DB - Pour plusieurs pistes de l'ANCA dans les zones dédiées à la recherche dans des zones accrues de précision.
HAN UKB S'il n'y a plus de transitions lors du suivi des objets étendus ou des fins de déménagement, en cas de début d'urgence de l'ANCA, dans le cas de lancements secrètes.<
Avec le calcul des trajectoires sur le nombre - lorsque l'ANCA est libérée à un point spécifié, lors de l'utilisation de systèmes de télévision.
Le travail réussi du complexe dans la composition de l'ANC ne démontre pas lors de l'exécution de véritables moteurs de recherche dans l'océan.
Reconnaissance.
En conclusion, je tiens à exprimer une profonde gratitude à tous les employés de l'IPMT, qui ont participé au développement et au test de systèmes hydroacoustiques de véhicules sous-marins. Un merci spécial à l'académicien Ageev m.D., la tête de la région de Kaskin, B. A. et Rylov N.I.
Conclusion
Références Researchs de thèse docteur de sciences techniques Matvienko, Yuri Viktorovich, 2004
1. Ageev m.d. Véhicule sans pilote autonome modulaire de 1.p. - MTS Journal, 1996, vol. 30, 1, p. 13-20.
2. Véhicules sous-marins inhabités autonomes. Sous le général ED. Acad. Ageeva m, d. - Vladivostok, Dalnawka, 2000, 272C.
4. R.Babb. Navigation auv pour les enquêtes scientifiques sous-marines. Technologie de la mer, 1990, décembre, p.25-32.
6. J. Romeo, G. Lester. La navigation est la clé des missions d'AUV. Technologie de la mer, 2001, décembre, p.24-29.
7. Borodin v.i., Smirnov G.e., Tollova H.A., Yakovlev G.V. Outils de navigation hydroacoustique. L., construction navale, 1983, 262c.
8. MILN P.H. Systèmes de positionnement hydroacoustique. L., construction navale, 1989,316c.
9. Gestone J.A., Cyr R.J., Roesler G:, George E.S. Développements récents dans la navigation sous-marine acoustique. Journal of Navigation, 1977, V.30, 2, p.246-280.
10. Boldrev B.C. Méthodes de précision. Définitions des coordonnées lors du travail hydrophysique en mer ouverte. Construction navale à l'étranger, 1980. №2. C.29-42.
11. Kyslov A. F., Postnikov I.v. Caractéristiques de précision des systèmes de navigation de balise avec une longue base acoustique. Tez. Dokl. 2 Union. Conf. Recherche et développement de l'océan, L., 1978. PME.2, p.95-96.
12. Kasatkin B.A., Kobidze V.v. Caractéristiques de la navigation hydroacoustique dans la zone de tablette. Au samedi Dispositifs sous-marins et leurs systèmes, de DFFA, Vladivostok, 1977, de 84 à 888.
13. Kasatkin B.A., Kobidze V.v. Système de navigation synchrone synchrone hydroacoustique. Brevet r.f. G01S 9/60, № 713278, 1978.
14. Smirnov G.e., Tollova N.A. Systèmes de navigation avec balises hydroacoustiques. Consolidation navale à l'étranger. 1980, №9, p.45-54.
15. K. Vestgard, R. Hansen, V. Jalving et H.PeRersen. Les résultats de l'enquête Hugin 3000 et des résultats sur le terrain.- / intervention sous-marine 2001 /.
16. T. Martin et G. Pilgrim. Défis de l'enquête dans le positionnement USBL acoustique de profondeur de véhicules sous-marins remorqués ou attachés. .- / Intervention sous-marine 2001 /.
17. Hubert Thomas, Eric Petit. Des véhicules sous-marins autonomes (AUV) aux véhicules sous-marins supervisés (SUV). Oceans-97.
18. Paramonov A.A., KLYUEV M.C., Storozhev p.P. Quelques principes pour la construction de systèmes de navigation hydroacoustique avec une longue base de données. VII interddes École scientifique. Conf. "Méthodes et moyens modernes d'études océanologiques", Moscou, 2001, p.244-245.
19. PARAMONOV A.A., AFANASYEV V.N. Système de navigation hydroacoustique HANS-M. VI interday École scientifique. Conf. "Méthodes modernes et moyens de recherche océanologique", Moscou, 2000, p. 100-112.
20. Ageev MD, Blidberg D.R., Kiselev Ji.B., Rylov N.I., Shcherbatyuk A.f. Etat et perspectives de développement de la robotique sous-marine. Technologies de la mer, Vladivostok, Dalnalock, 2001, ISK.4, P.6-23.
21. Ageev MD, Casatkin B.A., Kiselev L.V., Molokov Yu.G., Nikiforov V.v., Rylebov N.I. Véhicules sous-marins automatiques. L., construction navale, 1981.248 p.
22. J. Manley. Véhicules sous-marins autonomes pour l'exploration océanique. 0EANS-2003, p.327-331.
23. KOBIDZE V.V. La vitesse de propagation de signaux hydroacoustiques dans la gamme de gammes. Preprint, Vladivostok, que l'Académie des sciences de l'URSS de l'URSS, 1979, 37c.
24. KOBIDZE V.V. L'étude de la précision de l'autonomie hydroacoustique. - Auteur de la thèse kf-m.n. Vladivostok, ce DVTC de l'URSS Academy of Sciences, 1981, 26c.
25. Xavier Lurton, Nicholas W. Millard. La faisabilité d'un sistem de positionnement acoustique acoustique de base Vaiy-Long pour AUV. Procédée de l'océan-94, Brest-France, 1994, Vol.3, pp. 403-408.
26. Kasatkin B.A., Kosarev G.V. Caractéristique du développement des AP pour une très longue portée AUV. Procédée de l'océan-95, San-Diego, octobre 1995, V. Je, p. 175-177.
27. Kasatkin B.A. Système à longue portée de régie synchrone hydroacoustique. Brevet r.f. G01S 15/08, № 2084923, 1995.
28. Positionnement acoustique. www. Mors.fr.product.
29. Capteur de navigation de plage combinée et de roulement. Modèle NS-031. -www. Sonatech.com.Production.
30. Kasatkin B.A. Système de navigation synchrone synchrone hydroacoustique. Brevet r.f. G01S 15/08, № 2084924, 1995.
31. D. Thomson, S. Elson. Systèmes de positionnement acoustique de nouvelle génération. 0EANS-2002, P.1312-1318.
32. Transpondeur générique programmable et transpondeur / répondeur de Super sous-mini, types 7971/7977 / 7978 7970/7973 www.sonardyne.co.uk
33. B. Manson. Positionnement grand-zone avec précision LM. Systèmes océaniques -Internationaux, Dessen 2001, p. 15-19.
34. Kasatkin B.A., Kosarev G.V. Bases physiques de l'intervalle d'équilibre acoustique. Bulletin de DVO R et 998, №3.C.41-50.
35. KOBIDZE V.V. Modèles d'erreurs et d'algorithmes de traitement des informations sur la plage de la plage dans les systèmes de navigation hydroacoustique. Predprint, Vladivostok, que DVTC de l'URSS Academy of Sciences, 1979, 42C.
36. Kasatkin B.A. Caractéristiques invariantes du champ sonore dans l'océan en couches. Dokl. Académie des sciences de l'URSS, 1986, 291, №6, p. 1483-1487.
37. M.deffenbaugh, J.G. Bellingham, N. Schmidt. La relation entre position sphérique et hyperbolique. Procédure de l'océan-96,
38. Kasatkin B.A., Kosarev G.V. Analyse de l'exactitude de la mesure des coordonnées des balises-répondants du système de navigation hydroacoustique. Technologies de la mer, numéro.1. Vladivostok, Dalnaka, 1996, p.60-68.
39. Kasatkin B.A., Kosarev G.V. L'utilisation de la méthode Traverse pour déterminer les coordonnées absolues des balises intimées. Technologie de la mer, vol.2. Vladivostok, Dalnaka, 1998, p.65-69.
40. J. Opderbecke. Calibrage en mer d'un système de positation de véhicules sous-marins usbl. -Oceans "2000.
41. Posidonia 6000. Système de positionnement acuistique sous-marin. www.ixsea-deano.com.
42. Bulletin d'information. Kongsberg Simrad. Numéro n ° 2-2000. www.kongsberg-simrad.com.
43. K. Vestgard, R. Hansen, B.Jalving, O.A. Pedersen. L'enquête Hugin 3000 AUV. Desigh et des résultats sur le terrain. 0EANS "2001.
44. Système de suivi à faible coût LXT. www.ore.com.
45. Thomas C. Austin, Roger Stokey, C. von Alt, R. Arthur, R. Goldborough. Les rats, un système de suivi acoustique relatif développé pour la navigation océanique profonde - océans »97.
46. \u200b\u200bThomas C. Austin, Roger Stokey. Suivi acoustique relatif.- Technologie de la mer, 1998, mars, p.21-27.
47. M. Watson, C. Loggins et You.t. Ochi. Un nouveau système de base haute courte de haute précision (SSBL). Technologie sous-marine, 1998, p.210-215, Tokyo, Japon.
48. James E. Deveau. Systèmes de positionnement acoustique sous-marin. Oceans-95, vol.1, p. 167-174, San Diego, USA.
49. Nautronix. Positionnement précis www.nautronix.com
50. Yin Dongmei, Song Xinjian, Feng Haihong. La technologie clé pour mettre en œuvre un système de suivi et de positionnement d'objets sous-marins. -Le atelier international 3-D Harbin, Chine, 2002, p.65.
51. Yin Dongmei, Song Xinjian, Feng Haihong. Concevoir un système de positulation acoustique sous-marin. L'atelier international 3-D Harbin, Chine, 2002, p.43.
52. Komulakov B.A. Systèmes hydroacoustiques avec balises de répondants aux complexes sous-marins remorqués. - Construction navale, 1997, n ° 6, p.39-45.
53. Paramonov A.a., Nosov A.V., Kuznetsov V.n., Dreuchsev S.A., KLYUEV M.S., I I
54. Storozhev p.P. Sur l'amélioration de la précision du système de navigation hydroacoustique avec une base de noyau de suculation. VII International Confirmer. Selon Oceanology, M., 2001, p.80-81.
55. Bogorodsky A.V., Koryakin Yu.A., Ostrukhov A.A., Fomin Yu.P. Technologie hydroacoustique Recherche et technique de développement des océans. VII International Confirmer. Océanologie, M., 2001, p.266-269.
56. Zlobina N.V., Kamenev S.I., Kasatkin B.A. Analyse de l'erreur du système de navigation hydroacoustique avec une base ultra-vis. Au samedi Robots sous-marins et leurs systèmes. Problème 5.1992, Vladivostok, IPMT DVO RAS, P.116-123.
57. Kasatkin B.A., Kulinchenko S.I., MATVIENKO YU.V., Nurgaliev R.f. L'étude des caractéristiques de la direction de la direction de phase pour UBB-HANS.- Sam. Robots sous-marins et leurs systèmes. Vish.6.1995, Vladivostok, Dalnawka, P.75-83.
58. Kasatkin B.A. Évaluation de l'erreur du retardateur UB avec une base circulaire. Au samedi Technologie de la mer. Vol. 1 1996, Vladivostok, Dalnawka, p.69-73.
59. Kasatkin B.A., MATVIENKO Y.V. Le procédé de détermination du roulement sur la source de rayonnement et du dispositif pour sa mise en œuvre. RF brevet n ° 2158430, bulle. Isoble.. Doit33, 2000
60. Matvienko Yu.v., Makarov V.N., Kulinchenko S.I. , Nurgaliyev R.f., Rylov R.n. Système de navigation hydroacoustique avec une base à ultrastrie. Technologies de la mer, Vladivostok, Dalnalock, 2000, Décharge, art. 102-113.
61. MATVIENKO YU.V. Traitement des données dans un Finder de direction UB basé sur une antenne multi-éléments imparfaite. Viii interddes École scientifique. Conf. "Méthodes modernes et moyens de recherche océanologique" Moscou, 2003, Partie 1, P.24-25.
62. John G. Proakis. Communications numériques. Publication de l'industrie électronique de l'électronique, de la Chine, de Beijing, 2000, 928p.
63. M.Stojanovic. Avancées récentes dans les communications acoustiques sous-marines à grande vitesse. IEEE Journal Oceanic Engineering, Vol.2 L, N ° 2, 1996, p. 125-136.
64. M.Stojanovic, J.Catipovic, J.Proakis. Communications numériques cohérentes à la phase pour les canaux comptables sous-marins. IEEE Journal Oceanic Engineering, vol. 19, non. 1, 1994, p.100-111.
65. Stojanovic M., J.A. Catipovic et J.G. Proacis Traitement spatial et temporel réduit de la complexité des signaux de communication acoustique sous-marins.- J. acoust. SOC. AM., 98 (2), PT.L, août. 1995, p.961-972.
66. J. Labat. Communication sous-marine en temps réel. Ocean-94, Brest, France, Vol.3, p.501-506.
67. A.G. BESSIOS, F.M. Caimi. Compensation de multiples pour la communication acoustique sous-marine. Ocean-94, Brest, France, Vol.1, p.317-322.
68. Lester R. LeBlanc. Traitement spatio-temporatal des données de communication acoustique cohérentes dans les eaux peu profondes. IEEE J. OCEAN. Fra. Vol.25, no 1, janvier 2000, p. 40-51.
69. Lester R. LeBlanc. BeamPormer adaptatif pour la communication dans des eaux peu profondes
70. B. Geller, V. Capellano, J.M. Brossier, A. Essebbar et G. Jourdain. Égaliseur pour la transmission de taux vidéo dans la communication sous-marine multipathe. IEEE J. OCEAN. Fra. Vol.21, n ° 2, avril 1996, p. 150-155.
71. Billon D., Quellec B. Performance des systèmes de communication sous-marins acoustiques hautes données utilisant des faisceaux de faisceaux adaptatifs et une égalisation. Ocean-94, Brest, France, Vol.3, p.507-512.
72. R. Coates. Communication acoustique sous-marine. Technologie de la mer, 1994, no. 6, p. 41-47.
73. A. Zielinski, Young-Hoon Yoon, Lixue Wu. Analyse de la performance des communications acoustiques numériques dans le canal d'eau peu profonde. IEEE Journal Oceanic Engineering, Vol.20, N ° 4, 1995, p.293-299.
74. L. Wu et A. Zielinski. Rejet multi-trajets à l'aide d'une liaison acoustique de faisceau étroit. -Oceans-88, Baltimore, p.287-290.
75. Wang C.H., Zhu Min, Pan Feng, Zhang X.J., Zhu W.q. Modem de communication acoustique sous-marin MPSK.
76. Série 870 ATM 870. Modems de télémétrie acoustique. Manuel d'utilisation. - Datasonics, février 1999.
77. K. Scoux, J.Rice, S. Merriam. Un nouveau modem acoustique MFSK pour une utilisation en canaux sous-marins défavorables. Oceans-97, Halifax.
78. J. Catipovic, M. Deffenbaugh, L.Freitag, D. Frye. Un système de télémétrie acoustique pour l'acquisition et le contrôle des données d'amarrage de l'océan profond. Oceans-89, p. 887-892.
79. F. CAIMI, D. KOCAK, G. RITTER, M.SCHALZ. Comparaison et développement d'algorithmes de compression pour la télémétrie de l'auv. Avancées récentes.
80. P.I. Penin, E.A. Tsellev. Sur certaines approximations utilisées dans le calcul des canaux de communication hydroacoustique. Compilation acoustique lointale, vol. 1, Vladivostok, 1975, p. 15-18.
81. P.I. Penin, E.A. Tsellev, a.v. Shullgin. Calcul énergétique des canaux de communication hydroacoustique. Compilation acoustique lointale, vol. 1, Vladivostok, 1975, p. 19-23.
82. Svverkin E.I. Télémérée hydroacoustique en océanologie. - L. 1978. 149c., Publishing House of Lenuniversity.
83. V.P. Kodanev, P.P. Piskarev. Méthodes d'optimisation des caractéristiques du système de transmission d'informations numériques sur le canal hydroacoustique dans des conditions de réception de gréement unique. Magazine acoustique, 1996, volume 42, №4, p.573-576.
84. Yu.v. Zakharov, V.P. Kodanev. La résistance au bruit de la réception adaptative de signaux acoustiques complexes en présence de réflexions des limites de l'océan. Magazine acoustique, 1996, volume 42, №2, p.212-219.
85. Yu.v. Zakharov, V.P. Kodanev. Réception adaptative des signaux dans le canal de communication hydroacoustique en ce qui concerne le magazine acoustique Doppler Domisting, 1995, Volume 41, N ° 2, P.254-259.
86. Yu.v. Zakharov, V.P. Kodanev. Études expérimentales d'un système de transmission d'informations acoustiques avec des signaux semblables à un bruit. Magazine acoustique, 1994, volume 40, №5, p.799-808.
87. Volkov A.V., Kuryanov B.F., Penkin m.M. Communication hydroacoustique numérique pour les applications océaniques. VII International Confirmer. Océanologie, M., 2001, p.182-189.
88. L.R. LeBlanc et R.R.J. Beaujean. Traitement spatio-temporatal des données de communication acoustique cohérentes dans les eaux peu profondes. IEEE Journal Oceanic Engineering, Vol.25, no. 1, 2000, p.40-51.
89. M. Suzuki, K. Nemoto, T. Tsuchiya, T. Nakarishi. Télématétrie acoustique numérique des informations vidéo couleur. Oceans-89, p.893-896.
90. R. Rowlends. F.kvinn. Limites de la vitesse de transfert d'informations dans la télémétrie hydroacoustique. - Dans le CN. Acoustique sous-marine, Moscou, Monde, 1970, p.478-495.
91. Ridges A.A. Compteurs de vitesse du navire. Ji., Emploi, 1978, 286C.
92. K.V. Jorgenson, B.L. Grose, F.A. Crandal. Doppler Sonar appliqué à la navigation sous-marine de précision. Ocean-93, vol.2, p.469-474.
93. Kasatkin B.A., Zlobin H.B., Kasatkin S.B. Analyse des caractéristiques de l'agent piézo-formant de l'antenne phase du décalage Doppler. Au samedi Technologie de la mer. Vol. 1 1996, Vladivostok, Dalnawka, P.74-83.
94. R. Pinkel, M. Merrefield et J. Smith. Développement récent dans la technologie Doppler Sonar. . Ocean-93, vol.1, p.282-286.
95. Navigateur Workhorse RDI DVL. www.rdinstruments.com.
96. Demidine B.M., Zolotarev B.B., Matvienko Yu.v., Plotsky V.D., Servetnikov M.I. Système de navigation hydroacoustique. Tez. Fondation 22 Scientifique et technologie. Konalnevost. Polytech. Inst. Vladivostok, 1974.
97. Demidin V.M., Mavienko Yu.v., Plotsky V.D., Servertovikov M.I. Système de navigation de l'appareil sous-marin "Skat". Tez.Donal 1 All-Union. Conf. Selon l'étude et le développement des ressources océaniques du monde. Vladivostok, 1976.
98. Dorokhin K. A. Présentation des données du système de navigation hydroacoustique. Au samedi Robots sous-marins et leurs systèmes. Problème 5.1992, Vladivostok, IPMT DVO RAS, P.94-100.
99. Dorokhin K. A. Matériel et logiciel du bloc de navire du système de navigation hydroacoustique. Au samedi Robots sous-marins et leurs systèmes. Problème 5.1992, Vladivostok, IPMT DVO RAS, p. 101-109.
100. Dorokhin K.a. Contrôleur du système de navigation hydroacoustique. Au samedi Robots sous-marins et leurs systèmes. 1990, Vladivostok, IPMT DVO Academy of Sciences de l'URSS, p. 102108.
101. Sosalin Yu.G. Bases théoriques du radar et de la navigation radio. M., Radio et Communication, 1992, p. 134.
102. MATVIENKO YU.V. Sur la précision des conseillers de direction d'amplitude. Limite technologies, Vladivostok, Dalnawka, 2003, numéro 5, p.56-62.
103. SmartysHev MD, Dobrovolsky Yu.yu. Antennes hydroacoustiques. Répertoire. - Ji., Construction navale, 1984, p. 171.
104. YA.D. Shirman, V.n. Manjo. Théorie et technique de traitement des informations radar sur le fond des interférences. M., Radio et Communication, 1981, 416C.
105. J. Bendat, A. Pirsol. Analyse appliquée des données aléatoires. Moscou, MIR, 1989, 542C.
106. Kenneth S. Miller, Marvin M. Rochwarger. ACOVARICE Approch à l'estimation du moment spécifique. Ieetransactions sur la théorie de l'information, sept. 1972, p.588-596.
107. Weiqing Zhu, Wen Xu, Jianyun Yu. Estimation des erreurs de la paire d'impulsions de corrélation estimateur de phase différentielle de la matrice SONAR. Oceans-96.
108. Zhu Weiqing, Wang Changhong, Pan Feng, Zhu Min, Zhang Xiangjun. Estimation spectrale dans ADSP. Oceans-97.
109. Développement des dispositifs, des dispositifs et des principes pour la construction de systèmes hydroacoustiques de l'appareil sous-marin. - // Rapport sur l'OKR "Mayak-IPMT" //, scientifique. Mains. MATVIENKO YU.V. VLADIVOSTOK, GFC NGO DelStandart, 1992, 190s.
110. Matvienko Yu.v., Rylov R.n., Rylov N.I. Développement d'une antenne de réception d'un hydroletteur baaptique de phase de la vue latérale. VII interddes École scientifique. Conf. "Méthodes modernes et moyens de recherche océanologique", Moscou, 2001, p.
111. Développement et création d'un appareil sous-marin inhabité autonome avec une distance accrue et une autonomie. // Scientifique. Mains. Acadicien Ageev MD, P. Artiste MATVIENKO YU.V., VLADIVOSTOK, IPMT DBO RAS, 2001, N ° State Ros. 01.960.010861.
112. Rapports spéciaux sur l'OCC "K -1R" // En chef des concepteurs Accère Ageev MD, député GL. Const. Matvienko yu.v. Vladivostok, IPMT DVO RAS, 1998-2003.
113. G. Korn, T. maïs. Manuel de mathématiques.- Moscou, Science, 1970s, 720c.
114. MATVIENKO YU.V. Traitement statistique des informations du système de navigation hydroacoustique avec une base ultra-vis. Au samedi Technologie de la mer. Numéro.2.1998, Vladivostok, Dalnawka, P.70-80.
115. Rylev n.I. Sur la définition des paramètres de navigation dans UKB HANS selon une antenne multi-éléments. Au samedi Marine Technologies, Vladivostok, Dalnawka, 2003, numéro 5, p.46-55.
116. A. Steele, S. Byrne, J. Riley, M. Swift. Comparaison des performances des algorithmes d'estimation des roulements à haute résolution utilisant des données de test simulées et marines. IEEE Journal Oceanic Engineering, Vol.L8, N ° 4, 1993, p.438-446.
117. P. Kraeuther, J. oiseau. Composants principaux Traitement du traitement pour la cartographie acoustique de la bande. Oceans-97.
118. Circuits intégrés super-hauts et traitement de signal moderne. Ed. S. Guna, X. Whitehaus. T. Kailat., Moscou, Radio et Communication, 1989, 472c.
119. Marple ML. C.ji. Analyse spectrale numérique et son application. M. Monde., 1990, 584c.
120. A. Steele, C.byrne. Traitement de la matrice à haute résolution à l'aide de techniques de pondération implicites d'Eigenvector. IEEE Journal Oceanic Engineering, vol. 15, non. 1, 1990, p.8-13.
121. R. Roy et T. Kailath. Esprit - estimation des paramètres du signal via des techniques d'invariance de rotation. IEEE transactions sur l'acoustique, le discours et le traitement du signal, Vol.37, n ° 7, 1989, p.984-994.
122. Gao Hogze, Xu Xinsheg. Recherche sur la méthode de détection de phase de système de bathymétrie de peluche multi-faisceau. Iwaet-99, Harbin, Chine, 1999, p. 198-203.
123. Kinkulkin I.e., Rubtsov V.D., Fabrik M.a. Procédé de phase de détermination des coordonnées. M., 1979. 280s.
124. MAVIENKO YU.V., MAKAROV V.N., Kulinchenko S.I., Rylov R.n., retarder des signaux de navigation à large bande. Au samedi Technologies de la mer, Vladivostok, Dalnalock, 2000, Décharge, art. 114-120.
125. MAVIENKO YU.V., MAKAROV V.N., Kulinchenko S.I., Nurgaliyev R.f., Rylov R.n., Kasatkin B.A. Le retardateur du système de navigation hydroacoustique avec une base ultra-vis. RF Patent №2179730, bul. Isoble.. Doit5, 2002
126. V. Douglas et R. Pietsch. Techniques de formage de faisceaux optimales pour les matrices imparfaitement calibrées. Procédure de l'océan-96,
127. MD Ageev, A.A. Boreyko, Yu.v. Vaulin, B.e. Gornak, b.b. Zolotarev, Yu.v. Matvienko, a.f. SHCHERBATYUK a mis à niveau le sous-marin TSL pour travailler sur l'étagère et dans les tunnels. - en samedi Technologies de la mer, Vladivostok, Dalnawka, 2000, Décharge, p.23-38.
128. Matvienko Yu.v., Makarov V.n., Kulinchenko S.I. Sur la sélection de la structure et des caractéristiques de l'équipement du canal de communication hydroacoustique de la machine sous-marine. - Sam. Marine Technologies, Vladivostok, Dalnawka, 1996, numéro.1, p.84-94.
129. MATVIENKO YU. V. Estimation des principaux paramètres du système de communication hydroacoustique pour la machine sous-marine. Au samedi Technologie de la mer. Stage.4 2001, Vladivostok, Dalnawka, S.53-64.
130. Recherche prévue sur la création d'une gamme unifiée d'appareils autonomes gérés afin d'accroître l'efficacité des systèmes d'éclairage de lutte sous-marine sous-marine, anti-sous-marine et anti-exploitation
131. Navy. // Rapport sur NIR "Centurion-DVO" //, scientifique. Mains. Acadicien Ageev MD, P. Artiste Matvienko Yu.v., Vladivostok, IPMT DVO RAS, 1996
132. Fondations théoriques du radar. Ed. V.e. Dulevich., Moscou, Radio soviétique, 1978, 608C.
133. Kasatkin B.A., MATVIENKO YU.V. À l'évaluation du haut débit de convertisseurs piézo-cylindriques à basse fréquence. Magazine acoustique, 1983, volume 29, №1, p.60-63.
134. Balabaev S.M., Ivin N.F. Modélisation de l'ordinateur d'oscillations et émission de tailles finies. Vladivostok, Dalnaka, 1996, 214 p.
135. Convertisseurs piézocémiques. Répertoire éd. PUGACHEVA S.I. -Leningrad, construction navale, 1984, 256c.
136. matvienko yu.v. Méthodes de développement et de recherche pour décrire et construire des convertisseurs piézo-cylindriques à large bande. Abstrait dis. K.f.-m.n. Académie de Sciences de Duck Fedz de l'URSS, 1985, 22c.
137. MATVIENKO YU.V., YERMOLENKO YU.G., KIRIV I.B. Caractéristiques du développement des antennes de la gamme de fréquences moyennes pour les systèmes hydroacoustiques de l'appareil à eau profonde. Tez. Dokl. Interunion. Conf. , Ed, Tovvmu, Vladivostok, 1992, P.78-83.
138. V.A. Kasatkin, ju.g. LARIONOV, MATVIENKO Y.V.Développement d'une matrice d'eau profonde pour le profileur de sous-curseurs.- DÉTACE D'OCEANS-94, BREST-France, 1994.
139. Kasatkin B.A., MATVIENKO YU.V. Le spectre de la fréquence propre du piézagrégeur cylindrique. Journal acoustique, 1979, volume 25, n ° 6, p.932-935.
140. Kasatkin B.A. , Yermolenko Yu.g., matvienko Yu.v. Piézopraverteur multifonctionnel pour la recherche sous-marine. Sam Robots sous-marins et leurs systèmes, IPMT DVO RAS, IP.5.1992, p. 133-140. "
141. Ermolenko Yu.G., Kasatkin B.A., MATVIENKO YU.V. Émetteur hydroacoustique. Brevet de la Fédération de Russie №2002381, 1993.
142. Kasatkin B.A., MATVIENKO YU.V. Convertisseur électroacoustique. -. Auto Svid. №1094159, bul. Isolar., №19.1984.
143. MATVIENKO YU.V, sur l'effet de la structure du remplissage interne sur les caractéristiques des agents cylindriques piézo-formant. Dans le livre: méthodes physiques utilisées dans la recherche et le contrôle non destructifs., Khabarovsk, 1981, partie 2, p. 125-126.
144. Kasatkin B.A., MATVIENKO YU.V. Piézo-convertisseur cylindrique avec inversion d'inversion dans le livre: utilisation de méthodes physiques modernes dans la recherche et le contrôle non destructif., Khabarovsk, 1981, Partie 2, p.131-132.
145. Kasatkin B.A., MATVIENKO YU.V. Radiateur de mesure de la plage de son de fréquence sonore. Dimensions acoustiques. Méthodes et moyens. IV Session de la Société acoustique russe, Moscou, 1995, p.4.
146. Kasatkin B.A., MATVIENKO YU.V. Convertisseur électroacoustique cylindrique. Auto Svid. №1066665, bul. Frein, №2.1984.
147. Kasatkin B.A., MATVIENKO YU.V. Piézopraverteur cylindrique avec caractéristiques contrôlées. Magazine acoustique, 1982, volume 28, №5, p.648-652.
148. Kasatkin B.A., MATVIENKO YU.V. Dispositif pour rayonnement sonore à large bande. Auto Svid. №794834, 1982.
149. Analyse et développement d'antennes hydroacoustiques à large bande basées sur des convertisseurs piézocéramiques. // Rapports sur NIR "Thinker -1" //, scientifique. Mains. MATVIENKO YU.V., VLADIVOSTOK, GFC NGO DelStandart, 1983-1985.
150. Développement et test d'un trajet de rayonnement de signal en forme spéciale.
151. Rapports sur la composante du NIR "Evolvent -polos" //, scientifique. Mains. Matvienko Yu.v., Vladivostok, GFC Ngo Daltandart, 1988-1990.
152. Enquête sur la fonction de transfert d'un guide d'ondes acoustiques et d'antennes.
153. Rapports sur NIR Aquamarine //, scientifique. Mains. Kasatkin B.A., P. Artiste Matvienko Yu.v., Vladivostok, GFC Ngo Deltandart, 1989. .94c., Aucun numéro d'état. 01.890.073426.
154. Kasatkin B.A., MATVIENKO YU.V. Caractéristiques du pouls des méthodes cylindriques Piézo. Tez. Dokol All-Union Conf. Océan mondial, Vladivostok, 1983, p. 16
155. Rylev n.I. , Matvienko Yu.v., Rylov R.n. Antenne de réception de la phase Baptique Vue latérale Hydroletor. Brevet de la Fédération de Russie № 2209530, 2003
156. R.A. Moningo, Tu Meunier. Lattices d'antenne adaptative. M., radio et communication, 1986, 446s.
157. Matvienko Yu.v., Makarov V.N., Kulinchenko S.I. Sur une méthode de construction d'un récepteur Gass pour une très petite mer Sat. Recherche et développement de l'océan Monde, 6 négligent. Akust. Conf., Vladivostok, 1998, p. 162-163.
158. MAVIENKO Y.V., MAKAROV V.N., Kulinchenko S. I. Système simple de communication hydroacoustique dans la mer peu profonde pour AUV. Construction navale et ingénierie maritime, problèmes et perspectives, Vladivostoc, 2001, p. 495-498.
159. Matvienko Yu.v., Makarov B.H., Kulinchenko S.I. Un simple système de communication hydroacoustique dans une petite mer pour ANCA au SAT. Problèmes et méthodes de développement et de fonctionnement des armes et des équipements militaires de la marine, numéro.32, Vladivostok, TOVMI, 2001. C.268-275.
160. K.V. Jorgenson, B.L. Grose, F.A. Crandal. H. Allegret. Une nouvelle génération de courant de profilage acoustique. -Oceans-94, Vol.1, p.429-434.
161. B.C. BURDICK. Analyse des systèmes hydroacoustiques. Ji., Construction navale, 1988, 358 p.
162. T. Lago, P. Eriksson et M. Asman. La méthode Symmiktos: un robot et une méthode d'estimation précise pour l'estimation actuelle de Doppler Acclustic. Oceans-93, vol.2, p.381-386.
163. T. Lago, P. Eriksson et M. Asman. Estimation spectrale de courte temps des données de compteur de courant comptable Doppler. Ocean-96.
164. H. Susaki. Un algorithme rapide pour une mesure de fréquence de haute précision. Application à Doppler Sonar à ultrasons. 0EANS-2000, p. 116-121.
165. H. Susaki. Un algorithme rapide pour une mesure de fréquence de haute compréciation. Application à Doppler Sonar à ultrasons. IEEE Journal Oceanic Engineering, vol.27, no. 1, 2002, p.5-12.
166. matvienko Yu.v., Kulinchenko S.I., Kuzmin A.B. Accumulation quasicogène de signaux de pouls courts pour augmenter la vitesse du décalage Doppler. Au samedi Marine Technologies, Vladivostok, Dalnawka, 1998, Issu.2, p.81-84.
167. MAVIENKO YU.V., MAKAROV V.N., Kulinchenko S.I. , Kuzmin A.V. Procédure de réception de la législation de la Fédération de Russie de la Fédération de Russie №2120131, 1998.
168. MATVIENKO YU.V., KUZMIN A.V. Doppler sous-taille Doppler pour ANPA. - La cinquième conférence scientifique russe "l'État et les problèmes actuels de la navigation et de la navigation et de l'océanographie" (mais-2004, Saint-Pétersbourg).
169. Matvienko Yu.v., Nurgaliev R.f., Rylebov N.I. Système de suivi hydroacoustique pour l'emplacement du sous-marin autonome (ANPA). - Acoustique océanique, dokl. 9 shk.-sem. Acad. Ji.m. Brehov Moscou, 2002, p.347-350.
170. MAVIENKO YU.V., MAKAROV V.N., Nurgaliyev R.F Navigation et information de l'information ANA. Tez. Dokl. , Tovvmu, Vladivostok, 1998.
171. Zolotarev v.v., Casatkin B.A., Kosaev G.V., Kulinchenko S.I., MATVIENKO YU.V. Le complexe hydroacoustique pour l'appareil sous-marin inhabité autonome de l'eau profonde. Sam Travail de la X session de Rao, Moscou, 2000 S.59-62.
172. Ageev MD, Kasatkin B.A., Matvienko Yu.v., Rylov R.n., Rylov N.I. Des moyens hydroacoustiques de navigation de robot sous-marin. Viii interddes École scientifique. Conf. "Méthodes et moyens modernes de recherche océanologique", Moscou, 2003, Partie 2, P.40-41.
173. Ageev MD, Vaulin Yu.v., Kiselev Ji.B., Matvienko Yu.v., Rylebov N.I., Shcherbatyuk A.f. Systèmes de navigation sous-marine pour ANA. -Viii interface. École scientifique. Conf. "Méthodes modernes et moyens de recherche océanologique", Moscou, 2003, Partie 2, p. 13-22.
Veuillez noter que les textes scientifiques présentés ci-dessus sont affichés pour la familiarisation et obtenu en reconnaissant les textes originaux de Thèses (OCR). À cet égard, ils peuvent contenir des erreurs associées à l'imperfection des algorithmes de reconnaissance. En PDF, la thèse et les résumés de l'auteur que nous livrons de telles erreurs.


