17. STAZIONI RADAR CON APERTURA ANTENNA SINTESI (RSA)
I radar con una lunga antenna della fusoliera forniscono immagini radar dettagliate solo a distanze relativamente brevi. Quando si sposta la striscia di ricognizione a decine di chilometri dall'aereo, è necessario utilizzare antenne lunghe decine e centinaia di metri, che non possono essere posizionate su un aeromobile.
Per ovviare a questa difficoltà viene utilizzato il metodo di sintesi dell'apertura dell'antenna, che consiste nel memorizzare i segnali riflessi dai bersagli in un segmento della traiettoria di volo la cui lunghezza è uguale alla lunghezza richiesta dell'antenna. La successiva elaborazione dei segnali registrati nelle apparecchiature di bordo o di terra consente di ottenere un'immagine radar con un elevato dettaglio.
A attualmente il più diffuso sistemi ottici in lavorazione. Si basano sul metodo olografico, in cui i segnali radar registrati su pellicola (ologrammi radio) vengono utilizzati per formare un'immagine radar.
A Il principio SAR dell'olografia viene utilizzato sia nella registrazione delle onde radio riflesse che nei dispositivi ottici OOS.
L'onda di riferimento, passando attraverso l'ologramma, crea un'immagine dell'oggetto esattamente nel punto in cui si trovava al momento della registrazione dell'ologramma. Immagine
(punti) non saranno tratteggiati, ma alquanto sfocati. La dimensione spot δ x, che determina il dettaglio dell'immagine creata, può essere trovata da un'espressione che ha la forma seguente:
δx = λR/X;
dove λ è la lunghezza dell'onda irradiante; R - Distanza dall'ologramma all'oggetto; X - dimensione lineare dell'ologramma.
Formuliamo le caratteristiche principali del processo olografico:
- è necessario avere onde di riferimento e di segnale coerenti;
- nel processo di olografia, la distribuzione ampiezza-fase del campo d'onda del segnale viene ricodificata nella distribuzione dell'ampiezza del segnale e questo segnale viene registrato sotto forma di ologramma (schema di interferenza);
- per ripristinare l'immagine è necessario irradiare l'ologramma con un'onda di riferimento.
I glogrammi hanno una serie di proprietà interessanti. Uno di questi è la possibilità di modificare la scala dell'immagine Se la dimensione lineare dell'ologramma e la lunghezza d'onda del raggio di luce che ripristina l'immagine vengono modificate contemporaneamente per lo stesso numero di volte, quindi per il numero corrispondente di volte
anche la scala dell'immagine generata cambierà. Se i cambiamenti nella lunghezza d'onda e nella scala dell'ologramma sono sproporzionati, si formerà anche l'immagine, ma ci saranno distorsioni di scala in essa. In molti applicazioni pratiche queste distorsioni non giocano un ruolo significativo.
Questa proprietà consente di registrare ologrammi su una lunghezza d'onda, ad esempio nella gamma radio, ripristinare il fronte d'onda e osservare l'immagine su un'altra lunghezza d'onda, nella gamma ottica.
Si consideri un sistema radar a scansione laterale installato a bordo di un aeromobile, come mostrato nella Figura 17.1. Si supponga che un treno di segnali radar pulsati sia diretto al terreno da un sistema radar su un aeromobile e che i segnali di riflessione del terreno siano ricevuti da un sito vicino alla direzione dell'aereo. Chiamiamo la coordinata dell'immagine radar, trasversale alla direzione del volo, "portata" e coincidente con la traiettoria di volo - "azimut". È anche conveniente fare riferimento alla coordinata che collega la traiettoria radar su un aeromobile a qualsiasi bersaglio in considerazione come "portata inclinata". Se viene utilizzato un sistema radar convenzionale, la risoluzione azimutale sarà dell'ordine di λ r1 /D, dove λ è la lunghezza d'onda dei segnali radar, r1 è l'intervallo di inclinazione e D è la dimensione dell'apertura dell'antenna lungo il percorso di volo. Tuttavia, la lunghezza d'onda del segnale radar è di diversi ordini di grandezza maggiore dell'onda ottica e, quindi, per ottenere una risoluzione angolare paragonabile alla risoluzione di un sistema di fotoricognizione, è necessaria un'apertura dell'antenna D molto ampia. la lunghezza può essere di decine o addirittura centinaia di metri. Ovviamente, questo è difficile da implementare su un aereo.
Tuttavia, questa difficoltà può essere superata utilizzando il metodo dell'apertura sintetica. Il principio di base della sintesi dell'apertura è che i diversi elementi dell'array non devono esistere contemporaneamente nello spazio. Si supponga che un aeromobile abbia una piccola antenna a scansione laterale e che un raggio radar relativamente ampio esegua la scansione dell'area a causa del movimento dell'aereo. Le posizioni dell'aeromobile in cui vengono emessi gli impulsi radar possono essere considerate elementi di un array di antenne lineari. Quindi il segnale ricevuto in ciascuna di queste posizioni viene registrato coerentemente in funzione del tempo, poiché un segnale di riferimento viene applicato al ricevitore radar, consentendo la registrazione simultanea sia dell'ampiezza che dell'informazione di fase. Le varie onde complesse registrate vengono quindi elaborate in modo appropriato per sintetizzare l'apertura reale.
Per studiare più in dettaglio come viene implementato questo metodo di sintesi dell'antenna, consideriamo prima il problema con un punto target e poi estendiamo i risultati ottenuti dal metodo di sovrapposizione a un caso più complesso. Assumiamo che il punto target sia nel punto x1 .
L'impulso radar è formato dalla modulazione periodica rettangolare di un segnale sinusoidale con frequenza angolare pari a ω .
Area di visualizzazione azimutale
dove A1 è la costante complessa corrispondente. Il valore complesso di A1 include fattori come la potenza irradiata, la riflettività del target, lo sfasamento e la legge di propagazione (inversamente proporzionale alla quarta potenza). Utilizzando l'approssimazione parassiale, l'intervallo r può essere scritto come segue:
dove k = 2π /λ . L'espressione (17.3) dipende da t e x e le variabili spaziali e temporali sono correlate dalla relazione
dove v è la velocità dell'aeromobile. Se ora assumiamo che il terreno a distanza r1 sia costituito da un insieme di n punti bersagli, allora, usando il metodo di sovrapposizione, scriviamo il segnale riflesso totale nella forma
S(t) = ∑ An (xn ,r1 )exp(i[ω t-2kr1 -k(vt-xn )2 /r1 ]). (17.5) n=1
Se il segnale radar riflesso, descritto da (17.5), viene demodulato utilizzando un rivelatore sincrono, allora il segnale demodulato può essere scritto come:
S(t) = ∑ An (xn ,r1 ) cos[ω c t-2kr1 -k(vt-xn )2 /r1 +ϕ n ], (17.6) n=1
dove ω c è una frequenza portante arbitraria e ϕ n è un angolo di fase arbitrario. Per memorizzare viene utilizzato il segnale radar riflesso
tubo a raggi catodici. Il segnale demodulato ad esso applicato modula l'intensità del fascio di elettroni, che viene distribuito in direzione verticale in modo sincrono con gli impulsi radar riflessi. Se l'immagine del segnale proveniente dallo schermo del tubo viene proiettata su una pellicola fotografica che si muove in direzione orizzontale a velocità costante, verrà registrata una sequenza di tracce di portata, che si formeranno immagine 2D(fig.17.2). linee verticali descrivere lo sweep della gamma e le posizioni azimutali sono tracciate orizzontalmente. Pertanto, l'immagine registrata è un insieme di campioni di segnale S(t). Questo campionamento viene eseguito in modo tale che nel momento in cui i segnali vengono registrati sulla pellicola, risulti essere sostanzialmente indistinguibile dal segnale originale. Con questa registrazione è ovvio che le variabili nel tempo vengono convertite in variabili nello spazio in termini di distanza lungo la linea di registrazione. Se esposta correttamente, la trasparenza della pellicola di registrazione rappresenta la variazione dell'azimut del segnale radar riflesso. Quindi, se consideriamo solo i dati registrati nella direzione y = y1, la trasmissione di ampiezza può essere rappresentata come
)2 +ϕ |
||||||||||||||
∑ A (x |
) cos[ω x-2kr |
|||||||||||||
r 1 v f |
||||||||||||||
Intervallo (y)

Traccia dell'azimut modulato (x) sulla luminosità del fascio di elettroni
dove K1 e K2 - spostamento e coefficiente di proporzionalità, x=vf t - coordinata del film; vf è la velocità di movimento del film; ω x \u003d ω c / vf . Poiché il coseno può essere rappresentato come la somma di due complessi coniugati esponenti, la somma in (7.75) può essere scritta come due somme T1 e T2 :
) exp(i[ω x-2kr |
)2 (xx |
/v)2 +ϕ |
|||||||||||||||||||||||
)=---- ∑ A |
|||||||||||||||||||||||||
)2 (xx |
/v)2 +ϕ |
||||||||||||||||||||||||
)=---- ∑ A |
) exp(-i[ω x-2kr |
||||||||||||||||||||||||
Per semplicità, ci limitiamo a un problema per un obiettivo. Allora per n = j l'equazione (17.8) assume la forma
) = Cexp(iω x)[-i--- (----)2 (x - x |
/v)2], |
||||||
dove C è la costante complessa corrispondente. Il primo esponente descrive una funzione di fase lineare, cioè solo la pendenza dell'onda irradiata. L'angolo di inclinazione rispetto al piano della pellicola è determinato dall'espressione
Pertanto, con l'eccezione della funzione di fase lineare, la (7.76) è una sovrapposizione di N lenti cilindriche positive centrate nei punti dati da
x = vj xn /v, |
n = 1, 2, ..., N. |
Allo stesso modo (17.9) contiene un fattore di fase lineare - 0 e descrive una sovrapposizione di N lenti cilindriche negative con centri determinati da (17.14) e con lunghezze focali descritte da (17.13).
Per ripristinare l'immagine, la trasparenza corrispondente alla (17.7) viene illuminata con un'onda piana monocromatica, come mostrato in Fig. 17.3. Si può quindi mostrare, utilizzando la teoria di Fresnel-Kirchhoff o il principio di Huygens, che le immagini reali prodotte da T1 (x, y1 ) e le immagini virtuali prodotte da T2 (x, y1 ) saranno ricostruite alla focale anteriore e posteriore piani del film. Le posizioni relative delle immagini dei point scatterer sono distribuite lungo la linea dei fuochi, poiché i numerosi centri della struttura a lente della pellicola sono determinati dalla posizione dei point scatterer. Tuttavia, l'immagine ripristinata verrà macchiata nella direzione y; ecco perché questo film è essenzialmente la realizzazione di una funzione unidimensionale lungo y = y1 e, di conseguenza, non c'è azione di focalizzazione in questa direzione.
Poiché il nostro obiettivo è ripristinare l'immagine non solo nella direzione dell'azimut, ma anche nella direzione della gamma, è necessario visualizzare la coordinata y direttamente sul piano focale dell'immagine azimutale. Per fare ciò va ricordato che è direttamente proporzionale al range r1 . A sua volta, la lunghezza focale è direttamente proporzionale alla coordinata y considerata. Pertanto, per creare una mappa dell'area, dobbiamo mappare la coordinata y del segnale trasmesso su un piano la cui posizione è determinata dalle lunghezze focali della direzione azimutale. Ciò si ottiene facilmente posizionando una lente conica positiva direttamente dietro la pellicola di registrazione, come mostrato nella Figura 17.4. Ovviamente, se la trasmittanza di una lente conica è uguale a
x2/2f), |
||||||

f è una funzione lineare di r1, come mostrato in (17.13), è possibile rimuovere completamente l'intero piano denominato di tutta la diffrazione immaginaria all'infinito, lasciando invariata la trasmittanza nella direzione y. Pertanto, se una lente cilindrica viene posizionata a una lunghezza focale da una pellicola trasparente, l'immagine virtuale nella direzione y sarà all'infinito. Lascia che l'immagine azimutale e l'immagine nella direzione dell'intervallo (cioè nelle direzioni xey) corrispondano, ma nel punto all'infinito. Possono essere spostati indietro a una distanza finita utilizzando una lente sferica. Con questa operazione, l'immagine reale delle coordinate del terreno in azimut e distanza sarà focalizzata sul piano di uscita del sistema. Tuttavia, in pratica, l'immagine desiderata viene registrata attraverso una fenditura nel piano di uscita.
Il film secondario sviluppato può essere visualizzato e decifrato.
RASSEGNA MILITARE ESTERA N. 2/2009, pp. 52-57
Capitano M. VINOGRADOV,
candidato di scienze tecniche
Moderne apparecchiature radar installate su aeromobili e navicella spaziale, rappresentano attualmente uno dei segmenti più in via di sviluppo della tecnologia radioelettronica. L'identità dei principi fisici alla base della costruzione di questi strumenti permette di considerarli nell'ambito di un articolo. Le principali differenze tra i radar spaziali e aeronautici risiedono nei principi dell'elaborazione del segnale radar associati a diverse dimensioni dell'apertura, alla propagazione dei segnali radar in diversi strati dell'atmosfera, alla necessità di tenere conto della curvatura della superficie terrestre, ecc. Nonostante tali differenze, gli sviluppatori di radar con apertura di sintesi (RSA) fanno ogni sforzo per ottenere la massima somiglianza delle capacità di queste risorse di ricognizione.»
Attualmente, i radar aerotrasportati con sintesi dell'apertura consentono di risolvere compiti di ricognizione specifica (per rilevare la superficie terrestre in varie modalità), selezionare bersagli mobili e fissi, analizzare i cambiamenti nella situazione del suolo, rilevare oggetti nascosti nelle foreste e rilevare sepolti e piccoli oggetti marini.
Lo scopo principale del SAR è un'indagine dettagliata della superficie terrestre.
Aumentando artificialmente l'apertura antenna aerea, il cui principio base è l'accumulo coerente di segnali radar riflessi nell'intervallo di sintesi, è possibile ottenere un'elevata risoluzione in angolo. Nei sistemi moderni, la risoluzione può raggiungere decine di centimetri quando si opera nell'intervallo di lunghezze d'onda centimetriche. Valori simili di risoluzione dell'intervallo si ottengono attraverso l'uso della modulazione intra-impulso, ad esempio la modulazione di frequenza lineare (chirp). L'intervallo per sintetizzare l'apertura dell'antenna è direttamente proporzionale all'altitudine di volo della portante SAR, il che garantisce che la risoluzione del rilevamento sia indipendente dall'altitudine.
Riso. 3. Visualizzazione delle immagini a diversi livelli di dettaglio
Attualmente, ci sono tre modalità principali di rilevamento della superficie terrestre: panoramica, scansione e dettaglio (Fig. 1). Nella modalità di rilevamento, il rilevamento della superficie terrestre viene eseguito in modo continuo nella banda di cattura, separando le modalità laterale e anterolaterale (a seconda dell'orientamento del lobo principale del pattern dell'antenna). L'accumulo del segnale viene effettuato per un tempo pari all'intervallo calcolato per sintetizzare l'apertura dell'antenna per determinate condizioni di volo della portante radar. La modalità di ripresa a scansione differisce da quella di rilievo in quanto la ripresa viene eseguita sull'intera larghezza dell'andana, in strisce uguali alla larghezza dell'andana di cattura. Questa modalità è utilizzata esclusivamente nei radar spaziali. Quando si scatta in modalità dettagliata, l'accumulo del segnale viene eseguito a un intervallo maggiore rispetto alla modalità panoramica. L'aumento dell'intervallo è dovuto al movimento del lobo principale del pattern dell'antenna, sincrono con il movimento della portante radar, in modo che l'area irradiata sia costantemente nell'area di ripresa. I moderni sistemi consentono di ottenere immagini della superficie terrestre e degli oggetti che vi si trovano con risoluzioni dell'ordine di 1 m per la panoramica e di 0,3 m per le modalità dettagliate. L'azienda Sandia ha annunciato la creazione di un SAR per UAV tattici, che ha la capacità di sparare con una risoluzione di 0,1 m in modalità dettagliata. Le caratteristiche risultanti del SAR (in termini di rilevamento della superficie terrestre) sono significativamente influenzate dai metodi utilizzati per l'elaborazione digitale del segnale ricevuto, una componente importante del quale sono gli algoritmi adattativi per la correzione delle distorsioni di traiettoria. È l'impossibilità di mantenere a lungo una traiettoria rettilinea del vettore che non consente di ottenere risoluzioni paragonabili alla modalità di dettaglio nella modalità di rilievo continuo, sebbene non vi siano restrizioni fisiche sulla risoluzione nella modalità di rilievo.
La modalità di sintesi dell'apertura inversa (IRSA) consente di sintetizzare l'apertura dell'antenna non per il movimento del vettore, ma per il movimento del bersaglio irradiato. In questo caso non si può parlare del movimento traslatorio caratteristico degli oggetti terrestri, ma del movimento pendolare (su piani diversi), caratteristico delle imbarcazioni galleggianti che oscillano sulle onde. Questa caratteristica determina lo scopo principale dell'IRSA: il rilevamento e l'identificazione di oggetti marini. Le caratteristiche dei moderni IRSA consentono di rilevare con sicurezza anche piccoli oggetti, come i periscopi sottomarini. Tutti gli aerei in servizio con le forze armate statunitensi e altri stati, i cui compiti includono il pattugliamento della zona costiera e delle aree acquatiche, sono in grado di sparare in questa modalità. Le immagini ottenute come risultato dello scatto sono simili nelle loro caratteristiche alle immagini ottenute come risultato dello scatto con sintesi diretta (non inversa) dell'apertura.
La modalità di rilevamento interferometrico (Interferometrico SAR - IFSAR) consente di ottenere immagini tridimensionali della superficie terrestre. in cui sistemi moderni avere la capacità di effettuare riprese a punto singolo (ovvero utilizzare un'antenna) per ottenere immagini tridimensionali. Per caratterizzare queste immagini, oltre alla consueta risoluzione, parametro aggiuntivo, chiamato accuratezza dell'altezza o risoluzione dell'altezza. A seconda del valore dato parametro definire diverse gradazioni standard di immagini tridimensionali (DTED - Digital Terrain Elevation Data):
DTEDO............................ 900m
DTED1.................................90m
DTED2.............................. 30m
DTED3...............................10m
DTED4...............Sm
DTED5.............................. 1 m
In fig. 3.
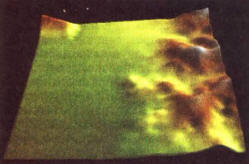
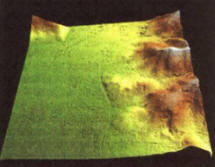
I livelli 3-5 sono ufficialmente chiamati "data from alta risoluzione» (HRTe - alto Risoluzione Terreno Elevazione dati). La determinazione della posizione degli oggetti a terra su immagini di livello 0-2 viene eseguita nel sistema di coordinate WGS 84, l'altezza viene misurata rispetto alla tacca di zero. Il sistema di coordinate delle immagini ad alta risoluzione non è attualmente standardizzato ed è in discussione. Sulla fig. La figura 4 mostra frammenti di aree reali della superficie terrestre ottenuti come risultato di immagini stereo con diverse risoluzioni.
Nel 2000 l'American Shuttle, nell'ambito del progetto SRTM (Shuttle Radar Topography Mission), il cui scopo era quello di ottenere informazioni cartografiche su larga scala, ha eseguito un rilievo interferometrico della parte equatoriale della Terra nella fascia da 60°N. sh. a 56°S sh., avendo ricevuto in uscita un modello tridimensionale della superficie terrestre nel formato DTED2. Per ottenere dati 3D dettagliati negli Stati Uniti, NGA HRTe? all'interno del quale saranno disponibili le immagini dei livelli 3-5.
Oltre all'imaging radar di aree aperte della superficie terrestre, il radar aereo ha la capacità di ottenere immagini di scene nascoste agli occhi dell'osservatore. In particolare permette di rilevare oggetti nascosti nelle foreste, oltre a quelli che si trovano sottoterra.
Radar penetrante (GPR, Ground Penetrating Radar) è un sistema di telerilevamento, il cui principio si basa sull'elaborazione di segnali riflessi da aree deformate o compositivamente diverse poste in un volume omogeneo (o relativamente omogeneo). Il sistema di rilevamento della superficie terrestre consente di rilevare vuoti, crepe, oggetti sepolti posti a diverse profondità, di identificare aree di diversa densità. In questo caso, l'energia del segnale riflesso dipende fortemente dalle proprietà assorbenti del suolo, dalle dimensioni e dalla forma del bersaglio e dal grado di eterogeneità delle regioni di confine. Allo stato attuale, GPR, oltre al suo orientamento militare, si è sviluppato in una tecnologia commercialmente valida.
Il sondaggio della superficie terrestre avviene per irraggiamento con impulsi con una frequenza di 10 MHz - 1,5 GHz. L'antenna irradiante può essere posizionata sulla superficie terrestre o posizionata a bordo dell'aeromobile. Parte dell'energia di irraggiamento viene riflessa dai cambiamenti nella struttura del sottosuolo terrestre, mentre gran parte penetra più in profondità. Il segnale riflesso viene ricevuto, elaborato e i risultati dell'elaborazione vengono visualizzati sul display. Quando l'antenna si muove, viene generata un'immagine continua che riflette lo stato degli strati del suolo sotterraneo. Poiché, infatti, la riflessione avviene per la differenza delle permittività dielettriche di varie sostanze (o diversi stati di una sostanza), il sondaggio può rivelare un gran numero di difetti naturali e artificiali in una massa omogenea di strati sottosuperficiali. La profondità di penetrazione dipende dalle condizioni del suolo nel sito di irradiazione. La diminuzione dell'ampiezza del segnale (assorbimento o diffusione) dipende in gran parte da una serie di proprietà del suolo, la principale delle quali è la sua conduttività elettrica. Pertanto, i terreni sabbiosi sono ottimali per il sondaggio. L'argilla e i terreni molto umidi sono molto meno adatti a questo. Buoni risultati si ottengono sondando materiali asciutti come granito, calcare, cemento.
La risoluzione del suono può essere migliorata aumentando la frequenza delle onde emesse. Tuttavia, un aumento della frequenza influisce negativamente sulla profondità di penetrazione della radiazione. Pertanto, i segnali con una frequenza di 500-900 MHz possono penetrare fino a una profondità di 1-3 me fornire una risoluzione fino a 10 cm e con una frequenza di 80-300 MHz penetrano fino a una profondità di 9-25 m , ma la risoluzione è di circa 1,5 m.
l'esercito principale lo scopo del radar il sondaggio del sottosuolo è il rilevamento di mine posate. Allo stesso tempo, il radar installato a bordo di un aereo, come un elicottero, consente di aprire direttamente le mappe dei campi minati. Sulla fig. La Figura 5 mostra le immagini di un radar montato su un elicottero che mostra la posizione delle mine antiuomo.
Radar aviotrasportato progettato per rilevare e tracciare oggetti nascosti nelle foreste (FO- PENNA - Fogliame Penetrante), permette di rilevare piccoli oggetti (in movimento e fissi), nascosti dalle chiome degli alberi. La ripresa di oggetti nascosti nelle foreste viene eseguita in modo simile alla ripresa convenzionale in due modalità: panoramica e dettaglio. In media, in modalità panoramica, la larghezza di banda di cattura è di 2 km, il che consente di ottenere in uscita immagini di 2x7 km della superficie terrestre; nella modalità di dettaglio il rilievo viene effettuato in tratti di 3x3 km. La risoluzione di scatto dipende dalla frequenza e varia da 10 m ad una frequenza di 20-50 MHz a 1 m ad una frequenza di 200-500 MHz.
I moderni metodi di analisi delle immagini consentono di rilevare e successivamente identificare oggetti nell'immagine radar ricevuta con una probabilità sufficientemente alta. Allo stesso tempo, il rilevamento è possibile su immagini con risoluzione sia alta (meno di 1 m) che bassa (fino a 10 m), mentre il riconoscimento richiede immagini con una risoluzione sufficientemente alta (circa 0,5 m). E anche in questo caso si può parlare per lo più solo di riconoscimento per segni indiretti, poiché la forma geometrica dell'oggetto è fortemente distorta per la presenza di un segnale riflesso dal coprifoglia, oltre che per la comparsa di segnali con uno spostamento di frequenza dovuto all'effetto Doppler che si verifica nel risultato delle foglie che ondeggiano nel vento.
Sulla fig. 6 mostra le immagini (ottica e radar) della stessa area. Oggetti (colonna di automobili), invisibili sull'immagine ottica, sono ben visibili sull'immagine radar, tuttavia, per identificare questi oggetti, astraendo da segni esterni(spostamento su strada, distanza tra le auto, ecc.) è impossibile, poiché a questa risoluzione le informazioni sulla struttura geometrica dell'oggetto sono completamente assenti.
Il dettaglio delle immagini radar ottenute ha permesso di implementare in pratica una serie di funzionalità, che, a loro volta, hanno realizzato possibile soluzione una serie di importanti problemi pratici. Uno di questi compiti è tenere traccia dei cambiamenti che si sono verificati su una determinata area della superficie terrestre in un certo periodo di tempo: un rilevamento coerente. La durata del periodo è solitamente determinata dalla frequenza del pattugliamento di una determinata area. Il rilevamento delle modifiche viene effettuato sulla base dell'analisi di immagini combinate a livello di coordinate di una data area, ottenute in sequenza una dopo l'altra. In questo caso sono possibili due livelli di dettaglio dell'analisi.
Il primo livello prevede la rilevazione di variazioni significative e si basa sull'analisi delle letture di ampiezza dell'immagine, che portano le principali informazioni visive. Molto spesso, questo gruppo include modifiche che una persona può vedere durante la visualizzazione simultanea di due immagini radar generate. Il secondo livello si basa sull'analisi delle letture di fase e consente di rilevare cambiamenti invisibili all'occhio umano. Questi includono la comparsa di tracce (di un'auto o di una persona) sulla strada, un cambiamento nello stato di finestre, porte ("aperte - chiuse"), ecc.
Riso. Fig. 5. Mappe dei campi minati in tre dimensioni durante le riprese in diverse polarizzazioni: un modello (a destra), un esempio di immagine di un'area reale della superficie terrestre con una complessa situazione del sottosuolo (a sinistra), ottenuta utilizzando un radar installato a bordo di un elicottero
Un'altra interessante capacità SAR, annunciata anche da Sandia, è la registrazione video radar. In questa modalità, la formazione discreta dell'apertura dell'antenna da sezione a sezione, caratteristica della modalità di rilevamento continuo, è sostituita dalla formazione multicanale parallela. Cioè, in ogni momento, non vengono sintetizzate una, ma diverse aperture (il numero dipende dai compiti da risolvere). Una sorta di analogo del numero di aperture formate è il frame rate nella registrazione video convenzionale. Questa funzionalità consente di implementare la selezione di bersagli mobili in base all'analisi delle immagini radar ricevute, utilizzando i principi del rilevamento coerente, che è essenzialmente un'alternativa ai radar standard che selezionano bersagli mobili in base all'analisi delle frequenze Doppler nel campo ricevuto segnale.
L'efficacia dell'implementazione di tali selettori di bersagli mobili è molto dubbia a causa dei notevoli costi hardware e software, pertanto, molto probabilmente tali modalità rimarranno nient'altro che un modo elegante per risolvere il problema della selezione, nonostante le opportunità aperte per selezionare bersagli in movimento a velocità molto basse (inferiori a 3 km/h).h, inaccessibile ai DSC Doppler). Anche la registrazione video diretta nella gamma radar non ha trovato applicazione al momento, sempre a causa degli elevati requisiti di velocità, pertanto non esistono modelli di equipaggiamento militare che implementano nella pratica questa modalità.
Una logica continuazione del miglioramento della tecnica di rilevamento della superficie terrestre nella gamma radar è lo sviluppo di sottosistemi per l'analisi delle informazioni ricevute. In particolare, riveste grande importanza lo sviluppo di sistemi per l'analisi automatica delle immagini radar, che consentano di rilevare, distinguere e riconoscere gli oggetti al suolo caduti nell'area di rilevamento. Complessità della creazione sistemi similiè associato alla natura coerente delle immagini radar, ai fenomeni di interferenza e diffrazione in cui portano alla comparsa di artefatti - abbagliamento artificiale, simili a quelli che appaiono quando viene irradiato un bersaglio con un'ampia superficie di diffusione efficace. Inoltre, la qualità dell'immagine radar è leggermente inferiore alla qualità di un'immagine ottica simile (per risoluzione). Tutto ciò porta al fatto che attualmente non esistono implementazioni efficaci di algoritmi per il riconoscimento di oggetti nelle immagini radar, ma il numero di lavori eseguiti in questo ambito, certi successi ottenuti di recente, suggeriscono che nel prossimo futuro si potrà parlare sui veicoli da ricognizione senza pilota intelligenti che hanno la capacità di valutare la situazione del suolo in base ai risultati dell'analisi delle informazioni ricevute dalle proprie apparecchiature di ricognizione radar aviotrasportate.
Un'altra direzione di sviluppo è l'integrazione, cioè una combinazione coordinata con il successivo trattamento congiunto di informazioni provenienti da più fonti. Questi possono essere radar che sparano in varie modalità, o radar e altre apparecchiature di ricognizione (ottico, infrarosso, multispettrale, ecc.).
Pertanto, i moderni radar con sintesi dell'apertura dell'antenna consentono di risolvere un'ampia gamma di compiti relativi alla conduzione di rilievi radar della superficie terrestre, indipendentemente dall'ora del giorno e dalle condizioni meteorologiche, il che li rende un mezzo importante per ottenere informazioni sullo stato della terra superficie e gli oggetti che vi si trovano.
Per commentare è necessario registrarsi al sito.
Risoluzione angolare - la caratteristica più importante qualsiasi sistema telescopico. L'ottica afferma che questa risoluzione è unicamente correlata alla lunghezza d'onda alla quale viene effettuata l'osservazione e al diametro dell'apertura d'ingresso del telescopio. Con grandi diametri, come sapete, un grosso problema. È improbabile che venga mai costruito un telescopio più grande di questo.
Uno dei modi per aumentare significativamente la risoluzione è il metodo di sintesi di aperture grandi ed extra grandi utilizzate in radioastronomia e radar. Nella gamma millimetrica, si prevede che l'apertura più grande - 14 km - sarà formata da 66 antenne del progetto ALMA in Cile.
Il trasferimento dei metodi di sintesi dell'apertura nella regione ottica, dove le lunghezze d'onda sono diversi ordini di grandezza più piccole di quelle dei radar, è associato allo sviluppo di tecniche di eterodina laser.
1. Basi fisiche della formazione dell'immagine.
Non sarebbe un errore dire che l'immagine in qualsiasi dispositivo ottico è formata dalla diffrazione della luce all'apertura di ingresso e nient'altro. Diamo un'occhiata all'immagine dell'oggetto dal centro dell'apertura. La distribuzione angolare della luminosità dell'immagine di una sorgente puntiforme di luce infinitamente lontana (come, del resto, di qualsiasi altra) sarà la stessa per un obiettivo e una camera oscura di uguale diametro. L'unica differenza tra un obiettivo e un foro stenopeico sta nel fatto che l'obiettivo trasferisce l'immagine formata dalla sua apertura dall'infinito al suo piano focale. Oppure, per dirla in altro modo, produce una trasformazione di fase del fronte d'onda del piano di ingresso in uno sferico convergente. Per una sorgente puntiforme distante e un'apertura circolare, l'immagine è il noto dipinto di Airy con anelli. 
In linea di principio, la dimensione angolare del disco di Airy può essere ridotta e, per così dire, la risoluzione può essere aumentata (secondo il criterio di Rayleigh), se l'apertura viene aperta in modo speciale. Esiste una tale distribuzione di trasmissione lungo il raggio in cui il disco centrale può teoricamente essere reso arbitrariamente piccolo. Tuttavia, in questo caso, l'energia luminosa viene ridistribuita sugli anelli e il contrasto dell'immagine complessa scende a zero.
Da un punto di vista matematico, la procedura per formare un'immagine di diffrazione si riduce ad una trasformata di Fourier bidimensionale del campo luminoso di ingresso (nell'approssimazione scalare, il campo è descritto da una complessa funzione di coordinate e tempo). Qualsiasi immagine registrata dall'occhio, dallo schermo, dalla matrice o da un altro ricevitore di intensità quadratica non è altro che uno spettro di ampiezza bidimensionale di un campo luminoso di apertura limitato emesso da un oggetto. È facile ottenere la stessa immagine di Airy se si prende una matrice quadrata di numeri complessi identici (simulando un fronte d'onda piatto da un punto distante), si "taglia" un'"apertura" circolare da essa, azzerando i bordi e si esegue il Trasformata di Fourier dell'intera matrice.
In breve, se in qualche modo scrivi il campo (sintetizza l'apertura) su un'area sufficientemente ampia senza perdere informazioni di ampiezza e fase, allora puoi fare a meno degli specchi giganti dei moderni telescopi e delle matrici di megapixel per ottenere un'immagine, semplicemente calcolando la trasformata di Fourier della matrice di dati risultante.
2. Posizione dei satelliti e super risoluzione.
Osserveremo un oggetto stabilizzato che si muove lungo la linea di vista, illuminato da una sorgente laser coerente continua. La radiazione riflessa da esso viene registrata da un fotorilevatore eterodina con una piccola apertura. Registrare un segnale durante il tempo t equivale a realizzare un'apertura unidimensionale di lunghezza vt, dove v è la velocità tangenziale dell'oggetto. È facile stimare la potenziale risoluzione di tale metodo. Diamo un'occhiata a un satellite vicino alla Terra nell'allungamento superiore, che vola a un'altitudine di 500 km a una velocità di 8 km/sec. Per 0,1 secondi di registrazione del segnale, otterremo un "telescopio unidimensionale" di 800 metri, teoricamente in grado di visualizzare nel campo del visibile i dettagli del satellite con una dimensione di una frazione di millimetro. Non male per una tale distanza.
Naturalmente, il segnale riflesso a tali distanze è attenuato di molti ordini di grandezza. Tuttavia, la ricezione eterodina (miscelazione coerente con la radiazione di riferimento) compensa ampiamente questa attenuazione. Dopotutto, come è noto, la fotocorrente di uscita del ricevitore in questo caso è proporzionale al prodotto delle ampiezze della radiazione di riferimento e del segnale in ingresso. Aumenteremo la quota della radiazione di riferimento e quindi amplificheremo l'intero segnale.
Puoi guardare dall'altra parte. Lo spettro del segnale registrato dal fotorilevatore è un insieme di componenti Doppler, ciascuna delle quali è la somma dei contributi di tutti i punti dell'oggetto che hanno la stessa velocità radiale. La distribuzione unidimensionale dei punti riflettenti su un oggetto determina la distribuzione di frequenza delle righe spettrali. Lo spettro risultante è essenzialmente una "immagine" unidimensionale dell'oggetto lungo la coordinata "Spostamento Doppler". Due punti del nostro satellite, posti ad una distanza di 1 mm l'uno dall'altro in un piano perpendicolare alla linea di vista, hanno una differenza di velocità radiale dell'ordine di 0,01-0,02 mm/sec. (Il rapporto di questa differenza con la velocità del satellite è uguale al rapporto tra la distanza tra i punti e la distanza dal satellite). La differenza tra le frequenze Doppler di questi punti per la lunghezza d'onda visibile di 0,5 micron sarà (f=2V/λ) di circa 100 Hz. Lo spettro (immagine Doppler) dell'intero microsatellite, diciamo, di 10 cm di dimensione, si adatterà all'intervallo di 10 kHz. Abbastanza misurabile.
Puoi anche vederlo da una terza parte. Questa tecnologia non è altro che una registrazione di ologrammi, ad es. pattern di interferenza che si verifica quando i campi di riferimento e di segnale sono mescolati. Contiene le informazioni di ampiezza e fase sufficienti per ripristinare l'immagine completa dell'oggetto.
Così, illuminando il satellite con un laser, registrando il segnale riflesso e mescolandolo con il raggio di riferimento del laser stesso, otteniamo una fotocorrente sul fotorilevatore, la cui dipendenza dal tempo riflette la struttura del campo luminoso lungo il -apertura dimensionale”, la cui lunghezza, come già accennato, può essere sufficientemente grande.
L'apertura 2D è, ovviamente, molto migliore e più informativa. Mettiamo in modo uniforme diversi fotorivelatori lungo il movimento del satellite e scriviamo quindi il campo riflesso sull'area vt*L, dove L è la distanza tra i fotorivelatori estremi, che in linea di principio non è limitata da nulla. Ad esempio, gli stessi 800 metri. Pertanto, sintetizziamo l'apertura di un "telescopio bidimensionale" con una dimensione di 800 * 800 metri. La risoluzione lungo la coordinata trasversale (L) dipenderà dal numero di fotorivelatori e dalla distanza tra loro, lungo l'altra coordinata "tempo" (vt) - dalla larghezza di banda della radiazione laser e dalla frequenza di digitalizzazione del segnale dal fotorilevatore.
Quindi, abbiamo un campo luminoso registrato per molto vasta area e possiamo farci quello che vogliamo. Ad esempio, per ottenere un'immagine bidimensionale di oggetti molto piccoli a una distanza molto grande senza alcun telescopio. Oppure puoi ripristinare la struttura tridimensionale dell'oggetto mediante la rifocalizzazione digitale nel raggio d'azione.
Naturalmente, la reale configurazione tridimensionale dei punti riflettenti su un oggetto non sempre coincide con la loro distribuzione di velocità radiale "Doppler". Ci sarà una corrispondenza se questi punti sono sullo stesso piano. Ma anche nel caso generale molte informazioni utili possono essere estratte dall'“immagine Doppler”.
3. Cosa è successo prima.
La DARPA americana qualche tempo fa ha finanziato un programma, la cui essenza era implementare una tale tecnologia. Avrebbe dovuto localizzare oggetti a terra con altissima risoluzione da un aereo in volo (carri armati, ad esempio), sono stati ottenuti alcuni dati incoraggianti. Tuttavia, questo programma è stato chiuso o classificato nel 2007 e da allora non se ne è saputo più nulla. Qualcosa è stato fatto anche in Russia. Qui potete vedere l'immagine ottenuta ad una lunghezza d'onda di 10,6 micron.
4. Difficoltà di attuazione tecnica a una lunghezza d'onda di 1,5 micron.
A matura riflessione, ho deciso di non scrivere nulla qui. Troppi problemi.
5. Alcuni primi risultati.
Finora, con difficoltà, è stato possibile "esaminare" da una distanza di 300 metri i dettagli di un oggetto metallico piatto a riflessione diffusa di 6 x 3 mm. Era un pezzo scheda a circuito stampato, ecco una foto: 
L'oggetto ruotava attorno ad un asse perpendicolare alla linea di vista, la registrazione del segnale riflesso avveniva approssimativamente nel momento di massima riflessione (abbagliamento). Lo spot del laser che illuminava l'oggetto aveva una dimensione di circa 2 cm Sono stati utilizzati solo 4 fotorivelatori, separati da 0,5 metri. La dimensione dell'apertura sintetizzata è stimata in 0,5 m per 10 m.
In realtà, per ogni evenienza, i segnali registrati stessi (a sinistra) e i loro spettri (a destra) in unità relative: 
Dalla foto precedente dell'oggetto, solo le aree illuminate e riflettenti di nostro interesse che vogliamo vedere sono selezionate da Photoshop: 
Immagine ricostruita dalla trasformata di Fourier 2D a 4 segnali e ridimensionata per il confronto: 
Questa immagine in realtà è composta da sole 4 linee (e circa 300 colonne), la risoluzione verticale dell'immagine, rispettivamente, è di circa 0,5 mm, ma l'angolo scuro ed entrambi i fori rotondi sembrano essere visibili. La risoluzione orizzontale è di 0,2 mm, questa è la larghezza delle tracce conduttive sulla scheda, tutti e cinque i pezzi sono visibili. (Un normale telescopio dovrebbe avere un diametro di 2 metri per vederli nel vicino infrarosso.)
In verità la risoluzione ottenuta è ancora lontana dal limite teorico, quindi sarebbe bello riportare alla mente questa tecnologia. Il diavolo, come sai, sta nei dettagli, e qui ci sono molti dettagli.
Grazie per l'attenzione.
La sintesi dell'apertura dell'antenna è una delle direzioni più promettenti nello sviluppo del radar, apparso alla fine degli anni '50 e che ha immediatamente attirato un'ampia attenzione. Il vantaggio principale di questa direzione è un aumento multiplo (1000 o più volte) della risoluzione angolare del radar. Ciò offre la possibilità di visione radio di oggetti radar e rilevamento di piccoli oggetti, aumentando la precisione della designazione del bersaglio e l'immunità al rumore radar. Nella prima fase dello sviluppo di questa direzione, i principali successi sono stati ottenuti in un significativo aumento dell'efficienza della ricognizione aerea e spaziale. Successivamente, i metodi di sintesi dell'apertura iniziarono ad essere utilizzati nei sistemi di attacco da ricognizione, nei radar multifunzionali per aerei per rilevare bersagli piccoli e di gruppo e puntare su di essi armi guidate, nei radar di sorveglianza pianificati, nell'intelligence elettronica e nei sistemi di navigazione.
Ci sono state due fasi nello sviluppo della teoria e della pratica dal radar alla radiovisione.
Nella prima fase, grazie all'uso di segnali di sondaggio a banda larga (100 MHz o più), è stato possibile fornire un'elevata risoluzione del ritardo del segnale e, di conseguenza, una risoluzione ad alta gamma (pochi metri o migliore). La risoluzione dell'intervallo è determinata dall'espressione
Ampiezza dello spettro del segnale di sondaggio.
![]() - lunghezza d'onda radar; c 1 - dimensione dell'antenna,
- lunghezza d'onda radar; c 1 - dimensione dell'antenna,
![]()

Formazione del DN di una vera antenna. Per spiegare il principio di sintesi dell'apertura, consideriamo innanzitutto la formazione del diagramma di radiazione di un'antenna reale, che determina la risoluzione nella coordinata angolare di un radar convenzionale.
Sia un'apertura dell'antenna lineare di dimensione d, su cui un'onda elettromagnetica piana cade con un angolo di 0 (Fig. 2.1), cioè l'antenna sta ricevendo.
Per apertura (apertura) si intende quella parte dell'antenna che partecipa alla radiazione o alla ricezione Onda elettromagnetica. Il fronte d'onda è una superficie di fasi uguali. In questo caso, è un aereo. La fase di un'onda elettromagnetica lungo l'apertura (asse X) è determinata dal ritardo del fronte d'onda rispetto al centro dell'apertura:

dove r(x) è la distanza dal fronte d'onda al punto x sull'apertura.
Il diagramma di radiazione si forma come risultato della somma in fase di un'onda elettromagnetica incidente sull'apertura:

L'intensità dell'onda elettromagnetica.
Il diagramma di radiazione normalizzato in questo caso è uguale a

al livello di 0,7 o, che è lo stesso, 0,5 in termini di potenza:
![]()
Quando un'antenna funziona, non solo per la ricezione, ma anche per la trasmissione, l'RP è definito come

e la larghezza equivalente del modello per la trasmissione e la ricezione
![]()
![]()
![]()
In un caso più generale, l'apertura dell'antenna imposta il volume del segnale spazio-temporale analizzato, che è la dipendenza dell'intensità, della fase e della polarizzazione del campo elettromagnetico dalle coordinate spaziali e dal tempo. Pertanto, l'apertura è caratterizzata dalle dimensioni geometriche del volume analizzato dell'onda elettromagnetica, dal tempo di analisi, dai parametri di polarizzazione e frequenza. In questo caso, la risoluzione nella coordinata angolare è determinata dalla variazione del segnale spazio-temporale nell'apertura dell'antenna in funzione della posizione angolare della sorgente di onde elettromagnetiche.
Esempi ben noti di tale segnale spazio-temporale sono le lenti olografiche volumetriche e le aperture sintetiche.

Sintesi dell'apertura. La principale differenza tra le aperture sintetizzate (artificiali) e le aperture dell'antenna convenzionali (reali) è che l'apertura sintetizzata (SA) si forma in sequenza nel tempo. In ogni questo momento la ricezione di un'onda elettromagnetica è effettuata da un'apertura reale, e l'apertura sintetizzata è il risultato della ricezione successiva di un'onda elettromagnetica da parte di un'apertura reale nel tempo nella sua diversa posizione rispetto alla sorgente dell'onda elettromagnetica. Consideriamo il processo di sintesi utilizzando l'esempio della formazione di un'apertura SAR rettilinea (Fig. 2.2).
Il suo pattern di ricezione è determinato allo stesso modo del pattern di apertura reale. Sfasamento dell'onda tra due posizioni reali dell'antenna sulla traiettoria

doppia rispetto a quella di un'apertura convenzionale, ciò è dovuto al doppio passaggio della distanza r da parte dell'onda elettromagnetica (in trasmissione e in ricezione). Di conseguenza, la larghezza del fascio di un'apertura SAR sintetizzata di questo tipo è inferiore a quella di un'apertura reale della stessa dimensione:

Il risultato principale della sintesi dell'apertura è che la dimensione dell'apertura è aumentata N volte rispetto alla dimensione dell'apertura reale.
di conseguenza si è formata un'apertura sintetizzata
movimento di una vera antenna. In questo caso, l'effetto si ottiene aumentando il volume del campo analizzato nello spazio e nel tempo.
Principali proprietà dell'apertura sintetizzata. Consideriamo le principali proprietà dell'apertura sintetizzata.
per sistemi aerei e spaziali. Valori tipici per le dimensioni relative dell'apertura vari sistemi il seguente:
Grazie a grande taglia Apertura SAR, è possibile ottenere un'elevata risoluzione lineare nella coordinata angolare a lunghe distanze:

L'apertura sintetizzata si forma come risultato della ricezione e dell'elaborazione dei segnali riflessi dal bersaglio, ad es. l'apertura sintetizzata determina l'RP solo per la ricezione. L'RP per la trasmissione durante la sintesi dell'apertura è determinato dall'RP dell'antenna reale. Le proprietà di polarizzazione e frequenza dell'SA sono anche determinate dall'antenna reale.
Quando si sintetizza l'apertura, solo un elemento dell'antenna (una vera antenna) può funzionare (irradiare, ricevere) contemporaneamente. In questo caso, non si verificano problemi elettrodinamici durante la formazione dell'intera apertura, poiché non vi è alcuna interazione di elementi nel campo elettromagnetico. Il compito di sintetizzare l'apertura e formare il diagramma di radiazione è in realtà ridotto allo sviluppo di algoritmi e alla loro esecuzione da parte del processore di elaborazione del segnale di traiettoria. Come per un'antenna reale, l'RP di un'apertura sintetizzata è la dipendenza del segnale all'uscita del processore dalla coordinata angolare di una sorgente puntiforme di radiazione o irradiazione (nel caso di SAR attivo).
L'RP può essere a raggio singolo, multiraggio, monopulse, adattivo, ecc.
Gli oggetti di osservazione SAR nella maggior parte dei casi si trovano nella zona intermedia (zona di Fresnel) dell'apertura e non nella zona lontana, come nella maggior parte delle antenne reali. Quando si riceve nella zona lontana, il fronte d'onda all'apertura è considerato piatto. Con un aumento delle dimensioni dell'apertura (o una diminuzione della distanza dall'oggetto), la sfericità del fronte d'onda non può più essere trascurata. La condizione del campo lontano viene solitamente scritta come
![]()
Per una vera antenna radar aviotrasportata, il confine della zona lontana è di circa 100 m e, quando sintetizzato, viene calcolato in migliaia di chilometri. Pertanto, in SAR, quando si elabora un segnale di traiettoria, è necessario tenere conto della sfericità del fronte di fase di un'onda elettromagnetica. Nel SAR più semplice, quando la dimensione del SA è piccola, la curvatura del fronte d'onda elettromagnetica non viene presa in considerazione. Questa modalità è chiamata restringimento del fascio Doppler (DOL) e l'aumento della risoluzione è piccolo (10...30) volte.
La presa in considerazione della sfericità del fronte d'onda durante l'elaborazione del segnale di traiettoria è chiamata messa a fuoco e l'apertura, rispettivamente, è chiamata apertura focalizzata. Sulla fig. 2.3 mostra la distribuzione del campo delle aperture sfocate (DOL) (a) e focalizzate (b) nelle zone intermedie e lontane del DN.

Alla distanza di messa a fuoco, cioè lo stesso di un'antenna a campo lontano convenzionale. Si può dire che il processo di focalizzazione trasferisce le proprietà direzionali dell'apertura dalla zona lontana alla zona intermedia.
Poiché la sfericità del fronte d'onda dipende dalla distanza dall'oggetto, è richiesta una legge di messa a fuoco diversa per diverse gamme, ad es. per garantire la focalizzazione della SA, è necessario un algoritmo multicanale per l'elaborazione del segnale di traiettoria.
Grazie alla messa a fuoco, l'SA fornisce una risoluzione nella zona intermedia non solo nell'angolo, ma anche nella portata, anche con un segnale modulato. Tuttavia, di solito è piccolo e la risoluzione dell'intervallo viene fornita modulando il segnale di rilevamento.
Le principali fonti di errore - incoerenza del segnale di traiettoria - sono le instabilità di fase dei moduli ricetrasmettitori, le instabilità di traiettoria della portante SAR e l'instabilità del mezzo di propagazione delle onde elettromagnetiche. Pertanto, l'errore consentito nel conoscere la traiettoria dell'antenna è di diversi millimetri (nell'intervallo centimetrico dell'onda elettromagnetica). Ciò richiede misure speciali per compensare questi errori utilizzando sistemi di micronavigazione e algoritmi di messa a fuoco automatica.
Le caratteristiche energetiche di SA (rapporto segnale/rumore interno) sono determinate dal guadagno di un'antenna reale e dal tempo di sintesi, ovvero, il tempo di accumulo coerente di segnali. L'immunità al rumore da interferenze attive e passive esterne è determinata sia dall'RP di un'antenna reale sia dalle proprietà direzionali dell'SA, ovvero selezione spaziale del rumore.
Infatti, in ciascuna posizione dell'antenna durante la sintesi dell'apertura, la potenza del segnale ricevuto è determinata dalla potenza di radiazione e dal guadagno dell'antenna e la somma in fase di questi segnali durante la sintesi equivale all'accumulo di energia del segnale durante la sintesi a una potenza spettrale costante del rumore interno. In relazione alle sorgenti di rumore esterne, inoltre, è possibile la selezione angolare, la cui efficacia dipende dall'RP delle aperture reali e sintetizzate.
Il movimento relativo dell'antenna e dell'oggetto richiesto per la formazione di SA può essere eseguito con vari metodi. La formazione di SA come risultato del movimento dell'antenna con un oggetto fermo è chiamata sintesi diretta e la formazione di SA durante il movimento di un oggetto e un'antenna fissa è chiamata sintesi inversa. In questo caso, è possibile formare SA come risultato della rotazione dell'oggetto, che equivale al movimento dell'antenna attorno all'oggetto.
L'uso simultaneo non solo di una, ma di molte antenne nel processo di sintesi consente di sintetizzare SA non solo lineari, ma anche piatte e volumetriche.
![]() che è un compito eccezionalmente difficile per i computer di bordo. In condizioni terrestri, questo problema viene risolto con successo da un processore ottico, che utilizza la registrazione di un segnale di traiettoria su pellicola fotografica e l'elaborazione del segnale analogico utilizzando un sistema ottico coerente.
che è un compito eccezionalmente difficile per i computer di bordo. In condizioni terrestri, questo problema viene risolto con successo da un processore ottico, che utilizza la registrazione di un segnale di traiettoria su pellicola fotografica e l'elaborazione del segnale analogico utilizzando un sistema ottico coerente.
La sintesi dell'apertura richiede una certa quantità di tempo, che porta a un ritardo delle informazioni nel SAR. Il ritardo minimo di informazione è determinato dal tempo di sintesi, cioè il momento della formazione delle SA. Di solito sono decimi - unità di secondi. Il ritardo massimo è determinato tenendo conto del tempo di esecuzione dell'algoritmo di sintesi da parte del corrispondente processore per l'elaborazione dei segnali di traiettoria. I processori ottici terrestri hanno il ritardo maggiore. Consiste nel tempo di volo dell'aeromobile nell'area di operazione SAR, il tempo di rientro alla base, il tempo di consegna della pellicola fotografica con la registrazione dei segnali di traiettoria al laboratorio, il tempo di elaborazione fotochimica di la pellicola, l'elaborazione ottica e la registrazione di immagini sulla pellicola fotografica secondaria e, infine, l'elaborazione fotochimica della pellicola secondaria. Questa volta può raggiungere diverse ore.
Capitano M. Vinogradov,
candidato di scienze tecniche
Le moderne strutture radar installate su velivoli e veicoli spaziali rappresentano attualmente uno dei segmenti in più intensi sviluppi della tecnologia elettronica. L'identità dei principi fisici alla base della costruzione di questi strumenti permette di considerarli nell'ambito di un articolo. Le principali differenze tra i radar spaziali e aeronautici risiedono nei principi dell'elaborazione del segnale radar associati a diverse dimensioni dell'apertura, alla propagazione dei segnali radar in diversi strati dell'atmosfera, alla necessità di tenere conto della curvatura della superficie terrestre, ecc. Nonostante tali differenze, gli sviluppatori di radar con apertura di sintesi (RSA) fanno ogni sforzo per ottenere la massima somiglianza delle capacità di queste risorse di ricognizione.
Attualmente, i radar aerotrasportati con sintesi dell'apertura consentono di risolvere compiti di ricognizione specifica (per rilevare la superficie terrestre in varie modalità), selezionare bersagli mobili e fissi, analizzare i cambiamenti nella situazione del suolo, rilevare oggetti nascosti nelle foreste e rilevare sepolti e piccoli oggetti marini.
Lo scopo principale del SAR è un'indagine dettagliata della superficie terrestre.

|
|
| Riso. Fig. 1. Modalità di scatto del SAR moderno (a - dettagliato, b - panoramica, c - scansione) | Riso. 2. Esempi di immagini radar reali con risoluzioni di 0,3 m (in alto) e 0,1 m (in basso) |

|
|
| Riso. 3. Visualizzazione delle immagini a diversi livelli di dettaglio | |
|
|
| Riso. Fig. 4. Esempi di frammenti di aree reali della superficie terrestre ottenuti ai livelli di dettaglio DTED2 (sinistra) e DTED4 (destra) | |
A causa dell'aumento artificiale dell'apertura dell'antenna di bordo, il cui principio di base è l'accumulo coerente dei segnali radar riflessi nell'intervallo di sintesi, è possibile ottenere un'elevata risoluzione dell'angolo. Nei sistemi moderni, la risoluzione può raggiungere decine di centimetri quando si opera nell'intervallo di lunghezze d'onda centimetriche. Valori simili di risoluzione dell'intervallo si ottengono attraverso l'uso della modulazione intra-impulso, ad esempio la modulazione di frequenza lineare (chirp). L'intervallo per sintetizzare l'apertura dell'antenna è direttamente proporzionale all'altitudine di volo della portante SAR, il che garantisce che la risoluzione del rilevamento sia indipendente dall'altitudine.
Attualmente, ci sono tre modalità principali di rilevamento della superficie terrestre: panoramica, scansione e dettaglio (Fig. 1). Nella modalità di rilevamento, il rilevamento della superficie terrestre viene eseguito in modo continuo nella banda di cattura, separando le modalità laterale e anterolaterale (a seconda dell'orientamento del lobo principale del pattern dell'antenna). L'accumulo del segnale viene effettuato per un tempo pari all'intervallo calcolato per sintetizzare l'apertura dell'antenna per determinate condizioni di volo della portante radar. La modalità di ripresa a scansione differisce da quella di rilievo in quanto la ripresa viene eseguita sull'intera larghezza dell'andana, in strisce uguali alla larghezza dell'andana di cattura. Questa modalità è utilizzata esclusivamente nei radar spaziali. Quando si scatta in modalità dettagliata, l'accumulo del segnale viene eseguito a un intervallo maggiore rispetto alla modalità panoramica. L'aumento dell'intervallo è dovuto al movimento del lobo principale del pattern dell'antenna, sincrono con il movimento della portante radar, in modo che l'area irradiata sia costantemente nell'area di ripresa. I moderni sistemi consentono di ottenere immagini della superficie terrestre e degli oggetti che vi si trovano con risoluzioni dell'ordine di 1 m per la panoramica e di 0,3 m per le modalità dettagliate. L'azienda Sandia ha annunciato la creazione di un SAR per UAV tattici, che ha la capacità di sparare con una risoluzione di 0,1 m in modalità dettagliata. Le caratteristiche risultanti del SAR (in termini di rilevamento della superficie terrestre) sono significativamente influenzate dai metodi utilizzati per l'elaborazione digitale del segnale ricevuto, una componente importante del quale sono gli algoritmi adattativi per la correzione delle distorsioni di traiettoria. È l'impossibilità di mantenere a lungo una traiettoria rettilinea del vettore che non consente di ottenere risoluzioni paragonabili alla modalità di dettaglio nella modalità di rilievo continuo, sebbene non vi siano restrizioni fisiche sulla risoluzione nella modalità di rilievo.
La modalità di sintesi dell'apertura inversa (IRSA) consente di sintetizzare l'apertura dell'antenna non per il movimento del vettore, ma per il movimento del bersaglio irradiato. In questo caso non si può parlare del movimento traslatorio caratteristico degli oggetti terrestri, ma del movimento pendolare (su piani diversi), caratteristico delle imbarcazioni galleggianti che oscillano sulle onde. Questa caratteristica determina lo scopo principale dell'IRSA: il rilevamento e l'identificazione di oggetti marini. Le caratteristiche dei moderni IRSA consentono di rilevare con sicurezza anche piccoli oggetti, come i periscopi sottomarini. Tutti gli aerei in servizio con le forze armate statunitensi e altri stati, i cui compiti includono il pattugliamento della zona costiera e delle aree acquatiche, sono in grado di sparare in questa modalità. Le immagini ottenute come risultato dello scatto sono simili nelle loro caratteristiche alle immagini ottenute come risultato dello scatto con sintesi diretta (non inversa) dell'apertura.
La modalità di rilevamento interferometrico (Interferometrico SAR - IFSAR) consente di ottenere immagini tridimensionali della superficie terrestre. Allo stesso tempo, i sistemi moderni hanno la capacità di effettuare riprese a punto singolo (ovvero utilizzare un'antenna) per ottenere immagini tridimensionali. Per caratterizzare i dati dell'immagine, oltre alla consueta risoluzione, viene introdotto un parametro aggiuntivo, chiamato accuratezza dell'altezza, o risoluzione dell'altezza. A seconda del valore di questo parametro vengono definite diverse gradazioni standard di immagini tridimensionali (DTED - Digital Terrain Elevation Data):
DTEDO.............................. 900 m
DTED1.................................90m
DTED2.............................. 30m
DTED3...............................10m
DTED4...............Sm
DTED5..............................1m
In fig. 3.
I livelli 3-5 sono ufficialmente conosciuti come dati HRTe-High Resolution Terrain Elevation. La determinazione della posizione degli oggetti a terra su immagini di livello 0-2 viene eseguita nel sistema di coordinate WGS 84, l'altezza viene misurata rispetto alla tacca di zero. Il sistema di coordinate delle immagini ad alta risoluzione non è attualmente standardizzato ed è in discussione. Sulla fig. La figura 4 mostra frammenti di aree reali della superficie terrestre ottenuti come risultato di immagini stereo con diverse risoluzioni.
Nel 2000 l'American Shuttle, nell'ambito del progetto SRTM (Shuttle Radar Topography Mission), il cui scopo era quello di ottenere informazioni cartografiche su larga scala, ha eseguito un rilievo interferometrico della parte equatoriale della Terra nella fascia da 60°N. sh. a 56°S sh., avendo ricevuto in uscita un modello tridimensionale della superficie terrestre nel formato DTED2. Per ottenere dati 3D dettagliati negli Stati Uniti, NGA HRTe? all'interno del quale saranno disponibili le immagini dei livelli 3-5.
Oltre all'imaging radar di aree aperte della superficie terrestre, il radar aereo ha la capacità di ottenere immagini di scene nascoste agli occhi dell'osservatore. In particolare permette di rilevare oggetti nascosti nelle foreste, oltre a quelli che si trovano sottoterra.
Il radar penetrante (GPR, Ground Penetrating Radar) è un sistema di telerilevamento, il cui principio si basa sull'elaborazione di segnali riflessi da aree deformate o di diversa composizione situate in un volume omogeneo (o relativamente omogeneo). Il sistema di rilevamento della superficie terrestre consente di rilevare vuoti, crepe, oggetti sepolti posti a diverse profondità, di identificare aree di diversa densità. In questo caso, l'energia del segnale riflesso dipende fortemente dalle proprietà assorbenti del suolo, dalle dimensioni e dalla forma del bersaglio e dal grado di eterogeneità delle regioni di confine. Allo stato attuale, GPR, oltre al suo orientamento militare, si è sviluppato in una tecnologia commercialmente valida.
Il sondaggio della superficie terrestre avviene per irraggiamento con impulsi con una frequenza di 10 MHz - 1,5 GHz. L'antenna irradiante può essere posizionata sulla superficie terrestre o posizionata a bordo dell'aeromobile. Parte dell'energia di irraggiamento viene riflessa dai cambiamenti nella struttura del sottosuolo terrestre, mentre gran parte penetra più in profondità. Il segnale riflesso viene ricevuto, elaborato e i risultati dell'elaborazione vengono visualizzati sul display. Quando l'antenna si muove, viene generata un'immagine continua che riflette lo stato degli strati del suolo sotterraneo. Poiché, infatti, la riflessione avviene per la differenza delle costanti dielettriche di varie sostanze (o diversi stati di una sostanza), il sondaggio può rivelare un gran numero di difetti naturali e artificiali in una massa omogenea di strati sottosuperficiali. La profondità di penetrazione dipende dalle condizioni del suolo nel sito di irradiazione. La diminuzione dell'ampiezza del segnale (assorbimento o diffusione) dipende in gran parte da una serie di proprietà del suolo, la principale delle quali è la sua conduttività elettrica. Pertanto, i terreni sabbiosi sono ottimali per il sondaggio. L'argilla e i terreni molto umidi sono molto meno adatti a questo. Buoni risultati si ottengono sondando materiali asciutti come granito, calcare, cemento.
La risoluzione del suono può essere migliorata aumentando la frequenza delle onde emesse. Tuttavia, un aumento della frequenza influisce negativamente sulla profondità di penetrazione della radiazione. Pertanto, i segnali con una frequenza di 500-900 MHz possono penetrare fino a una profondità di 1-3 me fornire una risoluzione fino a 10 cm e con una frequenza di 80-300 MHz penetrano fino a una profondità di 9-25 m , ma la risoluzione è di circa 1,5 m.
Lo scopo militare principale del radar sonda sotto la superficie è il rilevamento di mine piantate. Allo stesso tempo, il radar installato a bordo di un aereo, come un elicottero, consente di aprire direttamente le mappe dei campi minati. Sulla fig. La Figura 5 mostra le immagini di un radar montato su un elicottero che mostra la posizione delle mine antiuomo.
Il radar aviotrasportato, progettato per rilevare e tracciare oggetti nascosti nelle foreste (FO-PEN - FOliage PENetrating), consente di rilevare piccoli oggetti (in movimento e fissi), nascosti dalle chiome degli alberi. La ripresa di oggetti nascosti nelle foreste viene eseguita in modo simile alla ripresa convenzionale in due modalità: panoramica e dettaglio. In media, in modalità panoramica, la larghezza di banda di cattura è di 2 km, il che consente di ottenere in uscita immagini di 2x7 km della superficie terrestre; nella modalità di dettaglio il rilievo viene effettuato in tratti di 3x3 km. La risoluzione di scatto dipende dalla frequenza e varia da 10 m ad una frequenza di 20-50 MHz a 1 m ad una frequenza di 200-500 MHz.
I moderni metodi di analisi delle immagini consentono di rilevare e successivamente identificare oggetti nell'immagine radar ricevuta con una probabilità sufficientemente alta. Allo stesso tempo, il rilevamento è possibile su immagini con risoluzione sia alta (meno di 1 m) che bassa (fino a 10 m), mentre il riconoscimento richiede immagini con una risoluzione sufficientemente alta (circa 0,5 m). E anche in questo caso si può parlare per lo più solo di riconoscimento per segni indiretti, poiché la forma geometrica dell'oggetto è fortemente distorta per la presenza di un segnale riflesso dal coprifoglia, oltre che per la comparsa di segnali con uno spostamento di frequenza dovuto all'effetto Doppler che si verifica nel risultato delle foglie che ondeggiano nel vento.
Sulla fig. 6 mostra le immagini (ottica e radar) della stessa area. Gli oggetti (colonna di automobili) invisibili sull'immagine ottica sono chiaramente visibili sull'immagine radar; la struttura geometrica dell'oggetto è completamente assente.
Il dettaglio delle immagini radar ottenute ha permesso di implementare in pratica una serie di caratteristiche che, a loro volta, hanno permesso di risolvere una serie di importanti problemi pratici. Uno di questi compiti è tenere traccia dei cambiamenti che si sono verificati su una determinata area della superficie terrestre in un certo periodo di tempo: un rilevamento coerente. La durata del periodo è solitamente determinata dalla frequenza del pattugliamento di una determinata area. Il rilevamento delle modifiche viene effettuato sulla base dell'analisi di immagini combinate a livello di coordinate di una data area, ottenute in sequenza una dopo l'altra. In questo caso sono possibili due livelli di dettaglio dell'analisi.

|

|
| Fig. 5. Mappe dei campi minati in rappresentazione tridimensionale durante le riprese in diverse polarizzazioni: un modello (a destra), un esempio di immagine di un'area reale della superficie terrestre con una complessa situazione del sottosuolo (a sinistra ), ottenuto utilizzando un radar installato a bordo di un elicottero | |

|
|
| Riso. Fig. 6. Immagini ottiche (sopra) e radar (sotto) di una sezione di terreno con un convoglio di auto in movimento lungo una strada forestale | |

|
|
Il primo livello prevede la rilevazione di cambiamenti significativi e si basa sull'analisi delle letture di ampiezza dell'immagine, che portano le principali informazioni visive. Molto spesso, questo gruppo include modifiche che una persona può vedere durante la visualizzazione simultanea di due immagini radar generate. Il secondo livello si basa sull'analisi delle letture di fase e consente di rilevare cambiamenti invisibili all'occhio umano. Questi includono la comparsa di tracce (di un'auto o di una persona) sulla strada, un cambiamento nello stato di finestre, porte ("aperte - chiuse"), ecc.
Un'altra interessante capacità SAR, annunciata anche da Sandia, è la registrazione video radar. In questa modalità, la formazione discreta dell'apertura dell'antenna da sezione a sezione, caratteristica della modalità di rilevamento continuo, è sostituita dalla formazione multicanale parallela. Cioè, in ogni momento, non vengono sintetizzate una, ma diverse aperture (il numero dipende dai compiti da risolvere). Una sorta di analogo del numero di aperture formate è il frame rate nella registrazione video convenzionale. Questa funzionalità consente di implementare la selezione di bersagli mobili in base all'analisi delle immagini radar ricevute, utilizzando i principi del rilevamento coerente, che è essenzialmente un'alternativa ai radar standard che selezionano bersagli mobili in base all'analisi delle frequenze Doppler nel campo ricevuto segnale. L'efficacia dell'implementazione di tali selettori di bersagli mobili è molto dubbia a causa dei notevoli costi hardware e software, pertanto, molto probabilmente tali modalità rimarranno nient'altro che un modo elegante per risolvere il problema della selezione, nonostante le opportunità aperte per selezionare bersagli in movimento a velocità molto basse (inferiori a 3 km/h).h, inaccessibile ai DSC Doppler). Anche la registrazione video diretta nella gamma radar non ha trovato applicazione al momento, sempre a causa degli elevati requisiti di velocità, pertanto non esistono modelli di equipaggiamento militare che implementano nella pratica questa modalità.
Una logica continuazione del miglioramento della tecnica di rilevamento della superficie terrestre nella gamma radar è lo sviluppo di sottosistemi per l'analisi delle informazioni ricevute. In particolare, riveste grande importanza lo sviluppo di sistemi per l'analisi automatica delle immagini radar, che consentano di rilevare, distinguere e riconoscere gli oggetti al suolo caduti nell'area di rilevamento. La complessità della creazione di tali sistemi è associata alla natura coerente delle immagini radar, ai fenomeni di interferenza e diffrazione in cui portano alla comparsa di artefatti: abbagliamento artificiale, simile a quello che appare quando viene irradiato un bersaglio con una grande superficie di diffusione efficace . Inoltre, la qualità dell'immagine radar è leggermente inferiore alla qualità di un'immagine ottica simile (per risoluzione). Tutto ciò porta al fatto che attualmente non esistono implementazioni efficaci di algoritmi per il riconoscimento di oggetti nelle immagini radar, ma il numero di lavori eseguiti in questo ambito, certi successi ottenuti di recente, suggeriscono che nel prossimo futuro si potrà parlare sui veicoli da ricognizione senza pilota intelligenti che hanno la capacità di valutare la situazione del suolo in base ai risultati dell'analisi delle informazioni ricevute dalle proprie apparecchiature di ricognizione radar aviotrasportate.
Un'altra direzione di sviluppo è l'integrazione, cioè una combinazione coordinata con il successivo trattamento congiunto di informazioni provenienti da più fonti. Questi possono essere radar che sparano in varie modalità, o radar e altre apparecchiature di ricognizione (ottico, infrarosso, multispettrale, ecc.).
Pertanto, i moderni radar con sintesi dell'apertura dell'antenna consentono di risolvere un'ampia gamma di compiti relativi alla conduzione di rilievi radar della superficie terrestre, indipendentemente dall'ora del giorno e dalle condizioni meteorologiche, il che li rende un mezzo importante per ottenere informazioni sullo stato della terra superficie e gli oggetti che vi si trovano.
Rivista militare straniera n. 2 2009 P. 52-56


