اصول ساخت فعال مجتمع های هیدروکلتیک و سیستم های موضوعی: 1) اصول ساخت گاز فعال 2) اصول ساخت گاز ارتباطات و شناسایی 3) اصول ساخت معادن گاز هدف: 1. مطالعه اصول ساخت گاز فعال 2. بررسی اصول کار بر طرح های ساختاری گاز فعال II. هدف آموزشی 1. فعال سازی فعالیت های شناختی کادت. 2. تشکیل کادت های مهارت های فرماندهی (KMN) و مهارت های آموزشی (NVR). یک
 ادبیات: 1. استانداردهای دولتی اتحاد جماهیر شوروی و فدراسیون روسیه. GOST 2. سیستم یکپارچه مستندات طراحی (ECCD) 3. یو. A. Koryakin، S. S. Smirnov، G. V. Yakovlev. ماشین آلات هیدرو اکوستیک کشتی: وضعیت و مشکلات واقعی. - سنت پترزبورگ. : علم، 2004. - 410 p. 177 IL. 4. I. V. Solovyov، G. N. Korolkov، A. A. Barangenko و دیگران. رادیو الکترونیک دریایی: دایرکتوری. - سنت پترزبورگ. : Polytechnic، 2003. - 246 p. : ایل 5. G. I. Kazantsev، G. G. Kotov، V. B. Lokshin et al. هیدروسیک آموزش - متر: نظامی ویرایش 1993. 230 ثانیه ایل 2
ادبیات: 1. استانداردهای دولتی اتحاد جماهیر شوروی و فدراسیون روسیه. GOST 2. سیستم یکپارچه مستندات طراحی (ECCD) 3. یو. A. Koryakin، S. S. Smirnov، G. V. Yakovlev. ماشین آلات هیدرو اکوستیک کشتی: وضعیت و مشکلات واقعی. - سنت پترزبورگ. : علم، 2004. - 410 p. 177 IL. 4. I. V. Solovyov، G. N. Korolkov، A. A. Barangenko و دیگران. رادیو الکترونیک دریایی: دایرکتوری. - سنت پترزبورگ. : Polytechnic، 2003. - 246 p. : ایل 5. G. I. Kazantsev، G. G. Kotov، V. B. Lokshin et al. هیدروسیک آموزش - متر: نظامی ویرایش 1993. 230 ثانیه ایل 2
 بسته به روش به دست آوردن اطلاعات هیدرو اکوستیک (با توجه به روش استفاده از انرژی)، سیستم های هیدروکوستیک به سیستم های هیدرو اکوسیتیک فعال تقسیم می شوند a) سیستم های هیدرو سیتوسی فعال سیستم هیدروکلتیک فعال (به معنی) - دستگاهی است که سیگنال های هیدروسیولوژیکی را در آبزی تشکیل می دهند محیط زیست و در مرزهای پارتیشن آن، سیگنال های منعکس شده یا منتشر شده از اشیاء زیر آب و سطحی را می پذیرد. شرایط معادل سیستم فعال هیدرو اکوستیک فعال هیدرولیز های فعال، حذف اکو، محل اکو، و یا فقط هیدرولیک) است.
بسته به روش به دست آوردن اطلاعات هیدرو اکوستیک (با توجه به روش استفاده از انرژی)، سیستم های هیدروکوستیک به سیستم های هیدرو اکوسیتیک فعال تقسیم می شوند a) سیستم های هیدرو سیتوسی فعال سیستم هیدروکلتیک فعال (به معنی) - دستگاهی است که سیگنال های هیدروسیولوژیکی را در آبزی تشکیل می دهند محیط زیست و در مرزهای پارتیشن آن، سیگنال های منعکس شده یا منتشر شده از اشیاء زیر آب و سطحی را می پذیرد. شرایط معادل سیستم فعال هیدرو اکوستیک فعال هیدرولیز های فعال، حذف اکو، محل اکو، و یا فقط هیدرولیک) است.
 هیدروژن فعال - یک روش برای تشخیص و تعیین خواص اشیاء زیر آب بر اساس تابش سیگنال های هیدرو سیاتیک به یک محیط آبی، و همچنین پذیرش و پردازش سیگنال های اکو، که به دلیل بازتاب (یا پراکندگی) بوجود می آید امواج صوتی از اشیاء زیر آب. ابزار هیدروکلتیک (سیستم ها) ارائه هیدرولیوتیک های فعال، هیدروکولاکتور ها، ایستگاه های هیدروژن (GLS)، یا مسیرهای هیدرولیوم (CH)، مسیرهای حذف اکو (EP) و اندازه گیری های فاصله (ID) برای گاز نامیده می شود. معمولا در زیر GLAS سیستم های درک شده برای تشخیص و اندازه گیری فاصله تا PL و دیگر اشیاء زیر آب مهم است
هیدروژن فعال - یک روش برای تشخیص و تعیین خواص اشیاء زیر آب بر اساس تابش سیگنال های هیدرو سیاتیک به یک محیط آبی، و همچنین پذیرش و پردازش سیگنال های اکو، که به دلیل بازتاب (یا پراکندگی) بوجود می آید امواج صوتی از اشیاء زیر آب. ابزار هیدروکلتیک (سیستم ها) ارائه هیدرولیوتیک های فعال، هیدروکولاکتور ها، ایستگاه های هیدروژن (GLS)، یا مسیرهای هیدرولیوم (CH)، مسیرهای حذف اکو (EP) و اندازه گیری های فاصله (ID) برای گاز نامیده می شود. معمولا در زیر GLAS سیستم های درک شده برای تشخیص و اندازه گیری فاصله تا PL و دیگر اشیاء زیر آب مهم است

 این طرح منعکس کننده اصل تشخیص و تعیین فاصله تا هدف پذیرش تابش سیگنال بازتاب یافته G / A نشان دهنده سیگنال D \u003d CT / 2 بازتاب G / A
این طرح منعکس کننده اصل تشخیص و تعیین فاصله تا هدف پذیرش تابش سیگنال بازتاب یافته G / A نشان دهنده سیگنال D \u003d CT / 2 بازتاب G / A
 R انتقال سیستم (ژنراتور) A D پالس پالس شروع سیستم سیستم سیستم هماهنگ سازی سیستم پالس B در سیستم منبع تغذیه A B C D E E ویژگی های تشکیل دستگاه آنتن از راه دور دستگاه (دستگاه پذیرش) E فاصله d \u003d (C · t) / 2 آنتن آکوستیک پذیرش پذیرش
R انتقال سیستم (ژنراتور) A D پالس پالس شروع سیستم سیستم سیستم هماهنگ سازی سیستم پالس B در سیستم منبع تغذیه A B C D E E ویژگی های تشکیل دستگاه آنتن از راه دور دستگاه (دستگاه پذیرش) E فاصله d \u003d (C · t) / 2 آنتن آکوستیک پذیرش پذیرش

 آنتن آکوستیک (AA) برای تبدیل انرژی الکتریکی به آکوستیک و عقب طراحی شده است. دستگاه های ورودی برای پیش از افزایش سیگنال های دریافت شده، و همچنین برای تعویض آنتن آکوستیک با ژنراتور و دستگاه دریافت استفاده می شود. ژنراتور پالس های تابش را تشکیل می دهد پارامترهای مشخص شده. کانال های مسیر تشخیص پذیرش مشکلات تشخیص اشیاء زیر آب و تعریف خشن از مختصات آنها را حل می کنند. کانال های مختصات مختصات طراحی شده اند تا دقیقا مختصات اشیاء زیر آب را تعیین کنند، و پس از آن صدور آنها به سیستم کنترل سلاح.
آنتن آکوستیک (AA) برای تبدیل انرژی الکتریکی به آکوستیک و عقب طراحی شده است. دستگاه های ورودی برای پیش از افزایش سیگنال های دریافت شده، و همچنین برای تعویض آنتن آکوستیک با ژنراتور و دستگاه دریافت استفاده می شود. ژنراتور پالس های تابش را تشکیل می دهد پارامترهای مشخص شده. کانال های مسیر تشخیص پذیرش مشکلات تشخیص اشیاء زیر آب و تعریف خشن از مختصات آنها را حل می کنند. کانال های مختصات مختصات طراحی شده اند تا دقیقا مختصات اشیاء زیر آب را تعیین کنند، و پس از آن صدور آنها به سیستم کنترل سلاح.
 سیستم های پشتیبانی نیمه اتوماتیک از اهداف، امکان انجام پشتیبانی از اهداف را در حالت نیمه اتوماتیک با حذف خودکار مختصات فعلی انجام می دهند. کانال گوش دادن امکان گوش دادن به سیگنال های شایعه دریافت شده برای طبقه بندی تماس هیدروکوستیک با هدف را می دهد. سیستم صفحه نمایش یک دستگاه خروجی است و برای نمایش بصری اطلاعات دریافت شده و داده های هدف مورد نیاز است. سیستم مدیریت و هماهنگ سازی یک پیوند بین تمام دستگاه ها و سیستم های GLS است.
سیستم های پشتیبانی نیمه اتوماتیک از اهداف، امکان انجام پشتیبانی از اهداف را در حالت نیمه اتوماتیک با حذف خودکار مختصات فعلی انجام می دهند. کانال گوش دادن امکان گوش دادن به سیگنال های شایعه دریافت شده برای طبقه بندی تماس هیدروکوستیک با هدف را می دهد. سیستم صفحه نمایش یک دستگاه خروجی است و برای نمایش بصری اطلاعات دریافت شده و داده های هدف مورد نیاز است. سیستم مدیریت و هماهنگ سازی یک پیوند بین تمام دستگاه ها و سیستم های GLS است.
 دستگاه آموزشی داخلی ساخته شده (VUCU) در نظر گرفته شده است تا مهارت های اپراتور را با هدف، و همچنین مهارت های مدیریت GLS در حالت های مختلف کار کند. سیستم کنترل اتوماتیک ساخته شده (ACC) به شما امکان کنترل اصلی را می دهد مشخصات فنی GLS، گسل های آن را شناسایی کنید. GLS در عملیات با تهیه ولتاژ منبع به همه دستگاه ها گنجانده شده است، زیرا این ایستگاه دارای یک سپر توزیع است که سیستم کنترل سیستم منبع تغذیه نمایش داده می شود.
دستگاه آموزشی داخلی ساخته شده (VUCU) در نظر گرفته شده است تا مهارت های اپراتور را با هدف، و همچنین مهارت های مدیریت GLS در حالت های مختلف کار کند. سیستم کنترل اتوماتیک ساخته شده (ACC) به شما امکان کنترل اصلی را می دهد مشخصات فنی GLS، گسل های آن را شناسایی کنید. GLS در عملیات با تهیه ولتاژ منبع به همه دستگاه ها گنجانده شده است، زیرا این ایستگاه دارای یک سپر توزیع است که سیستم کنترل سیستم منبع تغذیه نمایش داده می شود.
 با توجه به روش بررسی منطقه آب نقد دایره ای (KO) 360 بخش بررسی (CO) 25 0 بررسی نشست (SHO) 0 360 بخش بخش بخش بخش (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0
با توجه به روش بررسی منطقه آب نقد دایره ای (KO) 360 بخش بررسی (CO) 25 0 بررسی نشست (SHO) 0 360 بخش بخش بخش بخش (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0


 شکل. 4. مشاهده شاخص با برنج اسکن مارپیچی. 9. مشاهده علائم از اهداف بر روی شاخص با یک برنج اسکن خط. 5. نمایش شاخص با یک برنج اسکن خط. 10. مشاهده شاخص با زنگ ها و فاصله ها
شکل. 4. مشاهده شاخص با برنج اسکن مارپیچی. 9. مشاهده علائم از اهداف بر روی شاخص با یک برنج اسکن خط. 5. نمایش شاخص با یک برنج اسکن خط. 10. مشاهده شاخص با زنگ ها و فاصله ها



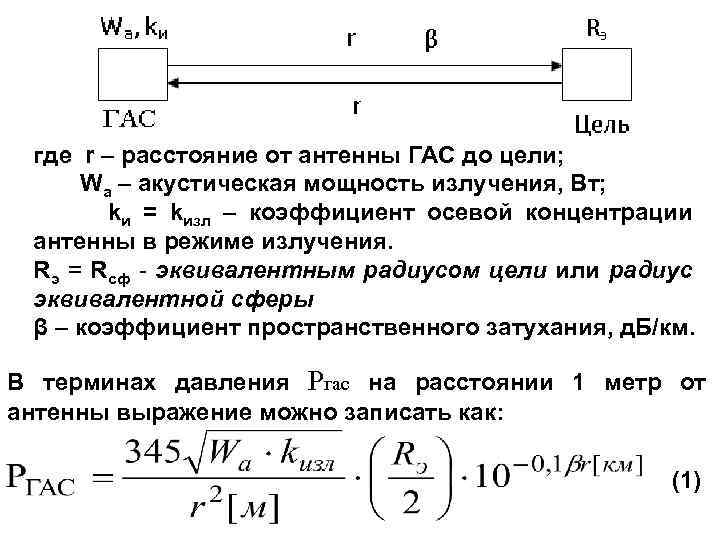 جایی که R فاصله از آنتن گاز به هدف است؛ وای - قدرت آکوستیک تابش، W؛ ki \u003d kizl - ضریب غلظت محوری آنتن در حالت تابش. Re \u003d RSF - شعاع هدف معادل یا شعاع کره معادل β ضریب ضريب ضريب فضايي، دي b / km است. از لحاظ فشار RGAs در فاصله 1 متر از آنتن، بیان را می توان به عنوان: (1)
جایی که R فاصله از آنتن گاز به هدف است؛ وای - قدرت آکوستیک تابش، W؛ ki \u003d kizl - ضریب غلظت محوری آنتن در حالت تابش. Re \u003d RSF - شعاع هدف معادل یا شعاع کره معادل β ضریب ضريب ضريب فضايي، دي b / km است. از لحاظ فشار RGAs در فاصله 1 متر از آنتن، بیان را می توان به عنوان: (1)
 ما سطح یک سیگنال اکو از هدف نسبت به سطح صفر P 0 را تعریف می کنیم، با استفاده از رابطه (1) و آن را با الگوریتم دهدهی مقدماتی تعریف می کنیم: ما علامت را معرفی می کنیم: - سطح سیگنال اکو در نقطه ای از ترتیب آنتن گاز، در d. b؛ - سطح تابش، در d. b؛ - این مقدار بیان شده در D است. B و مشخص کردن بازتاب پذیری جسم.
ما سطح یک سیگنال اکو از هدف نسبت به سطح صفر P 0 را تعریف می کنیم، با استفاده از رابطه (1) و آن را با الگوریتم دهدهی مقدماتی تعریف می کنیم: ما علامت را معرفی می کنیم: - سطح سیگنال اکو در نقطه ای از ترتیب آنتن گاز، در d. b؛ - سطح تابش، در d. b؛ - این مقدار بیان شده در D است. B و مشخص کردن بازتاب پذیری جسم.
 PR - زیان های استاندارد در انتشار، در d. B، با توجه به تضعیف سیگنال زمانی که آن را از آنتن گاز به هدف و بازگشت به حساب قانون کروی توزیع می شود. با توجه به اهداف معرفی شده، بیان فرم را می گیرد: ngas \u003d UI + CC - 2 PR (2) فرمول (2) برای تخمین سطح سیگنال اکو از هدف در نقطه پذیرش در یک بی حد و حصر یکنواخت استفاده می شود محیط بدون دخالت
PR - زیان های استاندارد در انتشار، در d. B، با توجه به تضعیف سیگنال زمانی که آن را از آنتن گاز به هدف و بازگشت به حساب قانون کروی توزیع می شود. با توجه به اهداف معرفی شده، بیان فرم را می گیرد: ngas \u003d UI + CC - 2 PR (2) فرمول (2) برای تخمین سطح سیگنال اکو از هدف در نقطه پذیرش در یک بی حد و حصر یکنواخت استفاده می شود محیط بدون دخالت
 با توجه به پردازش سیگنال ابزار RGAs \u003d PC و تداخل با RP در گاز، و با توجه به ضریب تشخیص Δ، شما می توانید بیان زیر RGAs \u003d δ RP معادله محدوده انرژی CH (EE) را ضبط کنید: \u003d جایی که k ضریب غلظت محوری آنتن است؛ ΔF - باند فرکانس (محدوده) مسیر پذیرش گاز، HZ؛ F 0 میانگین فرکانس محدوده، به. هرتز؛ β \u003d 0، 036 f 03/2 [k. HZ] - ضریب انقباض فضایی، د / کیلومتر.
با توجه به پردازش سیگنال ابزار RGAs \u003d PC و تداخل با RP در گاز، و با توجه به ضریب تشخیص Δ، شما می توانید بیان زیر RGAs \u003d δ RP معادله محدوده انرژی CH (EE) را ضبط کنید: \u003d جایی که k ضریب غلظت محوری آنتن است؛ ΔF - باند فرکانس (محدوده) مسیر پذیرش گاز، HZ؛ F 0 میانگین فرکانس محدوده، به. هرتز؛ β \u003d 0، 036 f 03/2 [k. HZ] - ضریب انقباض فضایی، د / کیلومتر.
 گاز بر روی PN آنتن گاز UI PR SK UP UP OND Englic حق اجاره Cha (EP) در فرم نمادین می تواند ثبت شود (با توجه به علامت "-") به عنوان: ep \u003d - (UI + SC - UP - PO + PN) \u003d 2 PR EP \u003d UE (سطح تداخل) \u003d
گاز بر روی PN آنتن گاز UI PR SK UP UP OND Englic حق اجاره Cha (EP) در فرم نمادین می تواند ثبت شود (با توجه به علامت "-") به عنوان: ep \u003d - (UI + SC - UP - PO + PN) \u003d 2 PR EP \u003d UE (سطح تداخل) \u003d
 نرم افزار (آستانه تشخیص) \u003d Mon (شاخص جهت) \u003d گاز فعال: - اندازه گیری فاصله گاز - ارتباطات گاز - گاز معیوب - گاز میانه گاز - گاز از DET های متخلخل - گاز از Swits Supply Sworts و گاز اضافی - گاز نورپردازی و توسعه - هیدروسیتتیک عقب نشینی - بررسی سمت گاز
نرم افزار (آستانه تشخیص) \u003d Mon (شاخص جهت) \u003d گاز فعال: - اندازه گیری فاصله گاز - ارتباطات گاز - گاز معیوب - گاز میانه گاز - گاز از DET های متخلخل - گاز از Swits Supply Sworts و گاز اضافی - گاز نورپردازی و توسعه - هیدروسیتتیک عقب نشینی - بررسی سمت گاز

 جنگ افزار هیدرواستاتیک NK شامل: Øgak MGK-335 "پلاتین" - یک مجتمع آبیاری از تشخیص، هدف گیری و ارتباطات؛ Øgak MGK-345 "برنز" - یک مجتمع آبیاری از تشخیص، هدف گیری و ارتباطات؛ Øgak MGK-355 "Polynom" یک مجموعه هیدروسیتونیک از تشخیص PL و صدور اهداف هدف از سلاح های ضد زیردریایی است؛ Ø برچسب ها MG-332 "Argan"، گاز MG-332 T "Argun-T" - یک ایستگاه هیدروکلتیک تشخیص و هدف قرار دادن برای کشتی های عتیقه؛ Ø برچسب ها MG-329 "OKA"، گاز MG-329 M "Oka-M" - ایستگاه هیدروکلتیک کاهش یافته؛ Ø برچسب ها MG-339 "Stemon" یا Gas MG-339 T "Schend-T" - یک ایستگاه تشخیص هیدرواستاتیک، تعیین مختصات، ارتباطات و شناسایی؛
جنگ افزار هیدرواستاتیک NK شامل: Øgak MGK-335 "پلاتین" - یک مجتمع آبیاری از تشخیص، هدف گیری و ارتباطات؛ Øgak MGK-345 "برنز" - یک مجتمع آبیاری از تشخیص، هدف گیری و ارتباطات؛ Øgak MGK-355 "Polynom" یک مجموعه هیدروسیتونیک از تشخیص PL و صدور اهداف هدف از سلاح های ضد زیردریایی است؛ Ø برچسب ها MG-332 "Argan"، گاز MG-332 T "Argun-T" - یک ایستگاه هیدروکلتیک تشخیص و هدف قرار دادن برای کشتی های عتیقه؛ Ø برچسب ها MG-329 "OKA"، گاز MG-329 M "Oka-M" - ایستگاه هیدروکلتیک کاهش یافته؛ Ø برچسب ها MG-339 "Stemon" یا Gas MG-339 T "Schend-T" - یک ایستگاه تشخیص هیدرواستاتیک، تعیین مختصات، ارتباطات و شناسایی؛
 Ø برچسب های MG-79 یا گاز MG-89 "Sulna" - یک ایستگاه هیدروسیوتیک تشخیص لنگر و معادن پایین؛ Ø برچسب های MG-7 "دستبند" و گاز MG-737 "Amulet-3" - یک ایستگاه هیدرواستاتیک کشف نیروهای خرابکاری زیر آب و معنی؛ ØGAS MG-26 "میزبان" یا گاز MG-45 "تخته نرد" - تجهیزات هیدروکلتیک و شناسایی. Ø برچسب های KMG-12 "Cassandra" - ابزار طبقه بندی اهداف برای ایستگاه های آبیاری از کشتی های سطحی زمانی که آنها در حالت فعال کار می کنند. Ø برچسب های MG-409 C یک سیستم تشخیص منفعل از بوتو هیدروسیتتیک است. Ø برچسب ها "Altyn" - تجهیزات برای اندازه گیری توزیع عمودی سرعت صدا در آب از کشتی سطح؛ ØGAS MI-110 کیلومتر - ابزار تشخیص ردیابی حفظ APL.
Ø برچسب های MG-79 یا گاز MG-89 "Sulna" - یک ایستگاه هیدروسیوتیک تشخیص لنگر و معادن پایین؛ Ø برچسب های MG-7 "دستبند" و گاز MG-737 "Amulet-3" - یک ایستگاه هیدرواستاتیک کشف نیروهای خرابکاری زیر آب و معنی؛ ØGAS MG-26 "میزبان" یا گاز MG-45 "تخته نرد" - تجهیزات هیدروکلتیک و شناسایی. Ø برچسب های KMG-12 "Cassandra" - ابزار طبقه بندی اهداف برای ایستگاه های آبیاری از کشتی های سطحی زمانی که آنها در حالت فعال کار می کنند. Ø برچسب های MG-409 C یک سیستم تشخیص منفعل از بوتو هیدروسیتتیک است. Ø برچسب ها "Altyn" - تجهیزات برای اندازه گیری توزیع عمودی سرعت صدا در آب از کشتی سطح؛ ØGAS MI-110 کیلومتر - ابزار تشخیص ردیابی حفظ APL.
 شکل. 1. پروژه Rocket Cruiser 1164 در خدمت پروژه 1164 سلاح های آبی: Q Gak MGK-335 "Platinum"؛ Q گاز MG-7 "دستبند" - 2 مجموعه؛ Q گاز MG-737 "Amulet-3"؛ Q KMG-12 "Cassandra". موارد زیر وجود دارد
شکل. 1. پروژه Rocket Cruiser 1164 در خدمت پروژه 1164 سلاح های آبی: Q Gak MGK-335 "Platinum"؛ Q گاز MG-7 "دستبند" - 2 مجموعه؛ Q گاز MG-737 "Amulet-3"؛ Q KMG-12 "Cassandra". موارد زیر وجود دارد
 شکل. 2. کشتی بزرگ ضد زیردریایی پروژه 1155 (1155) (1155.1) جنگ افزار هیدرواستاتیک زیر در خدمت پروژه 1155: GAK MGK-335 "Platinum"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ GUS "Altyn"؛ گاز MI-110 کیلومتر. در خدمت پروژه 1155. 1 سلاح های هیدروسیتونی زیر است: GAK MGK-355 "Polin"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ gus "altyn"؛ گاز MI-110 کیلومتر.
شکل. 2. کشتی بزرگ ضد زیردریایی پروژه 1155 (1155) (1155.1) جنگ افزار هیدرواستاتیک زیر در خدمت پروژه 1155: GAK MGK-335 "Platinum"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ GUS "Altyn"؛ گاز MI-110 کیلومتر. در خدمت پروژه 1155. 1 سلاح های هیدروسیتونی زیر است: GAK MGK-355 "Polin"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ gus "altyn"؛ گاز MI-110 کیلومتر.
 شکل. 3. پروژه پروژه 956. کلاس: کشتی موشک توپخانه، Subclass: ماموریت Squaded. 1 رتبه در خدمت پروژه 956 سلاح های هیدروسیتاتیک زیر است: GAK MGK-355 "Polin"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ گاز KMG-12 "Cassandra".
شکل. 3. پروژه پروژه 956. کلاس: کشتی موشک توپخانه، Subclass: ماموریت Squaded. 1 رتبه در خدمت پروژه 956 سلاح های هیدروسیتاتیک زیر است: GAK MGK-355 "Polin"؛ گاز MG-7 "دستبند" - 2 مجموعه؛ گاز KMG-12 "Cassandra".
 شکل. 4. پروژه قایق موشک 1241. 2 در خدمت پروژه 1241. 2 سلاح های هیدروسیتونی زیر وجود دارد: GAK MGK-345 "برنز"؛ گاز MG-45 "تخته نرد"؛
شکل. 4. پروژه قایق موشک 1241. 2 در خدمت پروژه 1241. 2 سلاح های هیدروسیتونی زیر وجود دارد: GAK MGK-345 "برنز"؛ گاز MG-45 "تخته نرد"؛
 شکل. 5. قایق ائتلاف پروژه 1241 در خدمت پروژه 1241 سلاح های هیدرواستاتیک زیر است: GAK MGK-345 "برنز"؛ گاز MG-45 "تخته نرد"؛
شکل. 5. قایق ائتلاف پروژه 1241 در خدمت پروژه 1241 سلاح های هیدرواستاتیک زیر است: GAK MGK-345 "برنز"؛ گاز MG-45 "تخته نرد"؛
 شکل. 6. کشتی کوچک ضد زیردریایی پروژه 1124 در خدمت پروژه 1124 سلاح های هیدروسیتونی زیر وجود دارد: گاز MG-339 "Stemon" یا گاز MG-339 T "Schend-T"؛ برخی از پروژه ها با GAC MGK-335 "Platinum" مسلح هستند؛ گاز MG-322 "Argan" یا گاز MG-322 T "Argun-T"؛ گاز MG-329 "OKA" یا گاز MG-329 M "OKA-M"؛ گاز MG-26 "میزبان" یا گاز MG-45 "تخته نرد"؛ گاز KMG-12 "Cassandra". گاز MG-409 S.
شکل. 6. کشتی کوچک ضد زیردریایی پروژه 1124 در خدمت پروژه 1124 سلاح های هیدروسیتونی زیر وجود دارد: گاز MG-339 "Stemon" یا گاز MG-339 T "Schend-T"؛ برخی از پروژه ها با GAC MGK-335 "Platinum" مسلح هستند؛ گاز MG-322 "Argan" یا گاز MG-322 T "Argun-T"؛ گاز MG-329 "OKA" یا گاز MG-329 M "OKA-M"؛ گاز MG-26 "میزبان" یا گاز MG-45 "تخته نرد"؛ گاز KMG-12 "Cassandra". گاز MG-409 S.
 شکل. 7. پروژه تریلر BTSCH 1265 (خیابان 260، 270) در خدمت پروژه 1265 شامل سلاح های هیدرو سیکتیک زیر است: گاز MG-79 یا گاز MG-89 "Sulna"؛ GUS "Kabarga"؛
شکل. 7. پروژه تریلر BTSCH 1265 (خیابان 260، 270) در خدمت پروژه 1265 شامل سلاح های هیدرو سیکتیک زیر است: گاز MG-79 یا گاز MG-89 "Sulna"؛ GUS "Kabarga"؛
 شکل. 8. یک کشتی بزرگ فرود از پروژه 775 پروژه 775 در خدمت پروژه 775 سلاح های هیدروسیتونی زیر است: دستبند گاز MG-7؛ گاز MG-26 "میزبان" یا گاز MG-45 "تخته نرد".
شکل. 8. یک کشتی بزرگ فرود از پروژه 775 پروژه 775 در خدمت پروژه 775 سلاح های هیدروسیتونی زیر است: دستبند گاز MG-7؛ گاز MG-26 "میزبان" یا گاز MG-45 "تخته نرد".
 ایستگاه های آبی "تامیر 11" (1953) گاز برای کشتی های سطحی جابجایی کوچک تعداد کل دستگاه ها - 17 توده ابزار - 1000 کیلوگرم. طراح اصلی Vovochnoe B. N.
ایستگاه های آبی "تامیر 11" (1953) گاز برای کشتی های سطحی جابجایی کوچک تعداد کل دستگاه ها - 17 توده ابزار - 1000 کیلوگرم. طراح اصلی Vovochnoe B. N.
 ایستگاه های هیدرو سیکتیک هرکول (1957) گاز برای کشتی های سطحی از تعداد کل و بزرگ تعداد دستگاه ها - 30 جرم ابزار - 5800 کیلوگرم طراح ارشد Umikov Z.N.
ایستگاه های هیدرو سیکتیک هرکول (1957) گاز برای کشتی های سطحی از تعداد کل و بزرگ تعداد دستگاه ها - 30 جرم ابزار - 5800 کیلوگرم طراح ارشد Umikov Z.N.
 ایستگاه های آبی "Mezen-2" (1963) تشخیص گاز از پایین حداقل. تعداد کل دستگاه های توده ابزار - 12 تا 2100 کیلوگرم طراح رئیس کم Novo I. I.
ایستگاه های آبی "Mezen-2" (1963) تشخیص گاز از پایین حداقل. تعداد کل دستگاه های توده ابزار - 12 تا 2100 کیلوگرم طراح رئیس کم Novo I. I.
 ایستگاه های آبی "Kashalot" (1963) گاز برای جستجو برای کشتی های غرق شده تعداد کل ابزارها - 22 جرم ابزار - 4000 کیلوگرم (بدون ZIP) طراح اصلی Timokov N. A.
ایستگاه های آبی "Kashalot" (1963) گاز برای جستجو برای کشتی های غرق شده تعداد کل ابزارها - 22 جرم ابزار - 4000 کیلوگرم (بدون ZIP) طراح اصلی Timokov N. A.
 مجتمع های آبی "روبین" (1964) GAK برای طراحان چند منظوره زیردریایی Ayalashka E. I. تعداد کل دستگاه ها - 56 جرم ابزار - 54747 کیلوگرم
مجتمع های آبی "روبین" (1964) GAK برای طراحان چند منظوره زیردریایی Ayalashka E. I. تعداد کل دستگاه ها - 56 جرم ابزار - 54747 کیلوگرم
 ایستگاه های آبی "تیتان -2" (1966) گاز برای کشتی های بزرگ ضد زیردریایی مجموع دستگاه های جمع آوری ابزار - 37 - 16000 کیلوگرم طراح رئیس Harat G. M.
ایستگاه های آبی "تیتان -2" (1966) گاز برای کشتی های بزرگ ضد زیردریایی مجموع دستگاه های جمع آوری ابزار - 37 - 16000 کیلوگرم طراح رئیس Harat G. M.
 ایستگاه های آبیاری "Argan" (1967) GUS برای کشتی های کوچک ضد زیردریایی کل دستگاه های جمع آوری ابزار - 30 - 7600 کیلوگرم با طراح اصلی ZIP Ivanchenko V. P.
ایستگاه های آبیاری "Argan" (1967) GUS برای کشتی های کوچک ضد زیردریایی کل دستگاه های جمع آوری ابزار - 30 - 7600 کیلوگرم با طراح اصلی ZIP Ivanchenko V. P.
 ایستگاه های آبیاری "Sulna" (1969) تشخیص گاز از لنگر و معادن پایین تعداد دستگاه های توده ای از ابزارها - 20 تا 3900 کیلوگرم طراح رئیس Lyashenko G. G.
ایستگاه های آبیاری "Sulna" (1969) تشخیص گاز از لنگر و معادن پایین تعداد دستگاه های توده ای از ابزارها - 20 تا 3900 کیلوگرم طراح رئیس Lyashenko G. G.
 ایستگاه های آبی "راش" (1971) گاز برای دادگاه های تحقیقاتی تعداد زیادی از ابزارها تعداد زیادی از ابزارها - 30 تا 11،000 کیلوگرم طراح رئیس Klimenko J. P.
ایستگاه های آبی "راش" (1971) گاز برای دادگاه های تحقیقاتی تعداد زیادی از ابزارها تعداد زیادی از ابزارها - 30 تا 11،000 کیلوگرم طراح رئیس Klimenko J. P.
 مجتمع های هیدروکوستیک "پلاتین" (1972) GAK برای کشتی های سطحی طراح متوسط \u200b\u200bو بزرگ جابجایی Klimovitsky L. D. تعداد ابزار - 64 جرم ابزار - 23 تن
مجتمع های هیدروکوستیک "پلاتین" (1972) GAK برای کشتی های سطحی طراح متوسط \u200b\u200bو بزرگ جابجایی Klimovitsky L. D. تعداد ابزار - 64 جرم ابزار - 23 تن
 مجتمع های آبی "Polynom" (1979) Gak برای NC از طراح بزرگ جابجایی بزرگ Soloviev V. G. تعداد کل ابزار - 152 جرم ابزار - 72،000
مجتمع های آبی "Polynom" (1979) Gak برای NC از طراح بزرگ جابجایی بزرگ Soloviev V. G. تعداد کل ابزار - 152 جرم ابزار - 72،000
 مجتمع های آبی "Star-M 1" (1986) Guck Digital Guck for NK Diectiver Diectiver Aleshchenko O. M. تعداد کل دستگاه ها - 64 دستگاه توده ای - 23000 کیلوگرم
مجتمع های آبی "Star-M 1" (1986) Guck Digital Guck for NK Diectiver Diectiver Aleshchenko O. M. تعداد کل دستگاه ها - 64 دستگاه توده ای - 23000 کیلوگرم
 مجتمع های هیدروسیتتیک "Kabarga" (1987) Gus Miniscovers برای مسیرهای دریایی، پایه و RAID تعداد کل دستگاه ها - 42 جرم ابزار - 8500 کیلوگرم طراح رئیس Lyashenko G. G.
مجتمع های هیدروسیتتیک "Kabarga" (1987) Gus Miniscovers برای مسیرهای دریایی، پایه و RAID تعداد کل دستگاه ها - 42 جرم ابزار - 8500 کیلوگرم طراح رئیس Lyashenko G. G.
 مجتمع های آبی "ستاره M 1 -01" (1988) گاز دیجیتال برای کشتی های سطحی از طراح ارشد جابجایی کوچک Aleshchenko O. M. تعداد کل دستگاه ها - 60 جرم ابزار - 16،500 کیلوگرم
مجتمع های آبی "ستاره M 1 -01" (1988) گاز دیجیتال برای کشتی های سطحی از طراح ارشد جابجایی کوچک Aleshchenko O. M. تعداد کل دستگاه ها - 60 جرم ابزار - 16،500 کیلوگرم
 مجتمع های هیدرو سیکتیک "Star-2" (1993) Guck Digital Guck برای NC طراح بزرگ جابجایی Borisenko N. N. تعداد کل دستگاه ها - 127 دستگاه توده - 77742 کیلوگرم
مجتمع های هیدرو سیکتیک "Star-2" (1993) Guck Digital Guck برای NC طراح بزرگ جابجایی Borisenko N. N. تعداد کل دستگاه ها - 127 دستگاه توده - 77742 کیلوگرم

 مجتمع های چشم انداز Corvette Project 12441، که برای نصب گاز "Zarya-2" را فراهم می کند
مجتمع های چشم انداز Corvette Project 12441، که برای نصب گاز "Zarya-2" را فراهم می کند
زیردریایی های دیزلی-الکتریکی شوروی ساختمان پس از جنگ Gagin Vladimir vladimirivich
مجتمع های هیدروکلتیک PL در مبارزه ضد زیردریایی
قایق های دیزلی الکتریکی از اولین پروژه های پس از جنگ "جاده" را برای خدمه زیردریایی های مدرن، در کمپین های اقیانوس، به دست آوردن بهره برداری از عملیات نظامی، تسلط بر تکنیک های شنا شناختی، مطالعه وضعیت هیدرولوژیکی و هیدروگرافی از مناطق مهم استراتژیک اقیانوس، تمرین تاکتیک های ضد پالمر و ضد Worr.
تاکتیک های مبارزه ضد زیردریایی اغلب به جستجو و تشخیص عقاب PL با استفاده از ابزارهای هیدروکوستونی که زودتر از دشمن انجام می شود، کاهش می یابد.
در عین حال، وضعیت محیط اطراف، مهمترین ارزش ها، به ویژه چنین پارامترها، به عنوان مناطق همگرایی صوتی و موقعیت زیردریایی نسبت به "ترموکلین" به دست می آید.
مناطق همگرایی مناطق حلقه ای در اطراف کشتی زیر آب هستند. صدای که از نقطه همگرایی قرار گرفته در منطقه همگرایی قرار دارد، بسته به فشار و دمای آب، با توجه به سطح مارپیچ از طریق فواصل نامنظم، به بالا و پایین حرکت می کند، که همچنین به حالت اطراف بستگی دارد محیط.
فرمانده کشتی، تلاش نمی کند به این مناطق سقوط نکنیم - به جایی که، به نظر او، هدف، می تواند از تشخیص جلوگیری کند. برای انجام این کار، او باید در مناطقی باشد که صدای آن به منبع آن اعمال می شود، به سادگی شعاعی است.
ساده ترین راه این است که موقعیت بالای لایه پرش درجه حرارت (Thermocline) یا زیر آن را به طوری که آن را به اشتراک گذاری زیردریایی ها - پس از آن صداهای منتشر شده توسط موتور آن به احتمال زیاد از لایه منعکس می شود و قایق دشمن آن را تشخیص نمی دهد .
جهش دما یک لایه مرزی از فضای زیرزمینی است، جداسازی آب سطحی گرم و مناطق عمیق سردتر.
زیردریایی های دیزلی همراه با اتمی، آنها یک مکان برجسته در برنامه های تهاجمی بلوک ناتو کشورهای ناتو را اشغال می کنند. با توجه به کتاب مرجع "جین"، در اواسط سال 1980، در ناوگان اتحادیه آتلانتیک شمالی، 186 قایق دیزلی وجود داشت.
زیردریایی های دیزلی دارای مزایای خاصی از اتمی هستند، به ویژه، به طور خاص، سر و صدای کمتر، که شرایط را برای عملیات ایستگاه های هیدروکوستیک (گاز) بهبود می بخشد، در صورت حل مشکلات مبارزه ضد زیردریایی، شرایط را بهبود می بخشد.
در حال حاضر، با توجه به مطبوعات خارجی، ادغام تکنولوژی هیدروکوستیک با سیستم های BIUS و سیستم های مدیریت سلاح بر اساس استفاده گسترده از رایانه ها رخ می دهد. در نتیجه، قابلیت های تاکتیکی تجهیزات هیدروکلتیک به صورت کیفی تغییر کرد. احتمال تشخیص اهداف و طبقه بندی تماس دریافت شده افزایش یافته است. علاوه بر این، در همان زمان واقعی برای نظارت بر چندین هدف (حداکثر شش) و به سرعت تشخیص تغییرات در مانور خود، به طور خودکار به دست آوردن اطلاعات و به طور مداوم آن را به تمام سیستم های کنگوگات و به وضوح، به راحتی، به راحتی، به راحتی، به راحتی، به طور واضح، صفحه نمایش و صفحه نمایش، و در صورت لزوم، ثبت نام کنید.
پردازش سیگنال دیجیتال به سیستم های مکان منفعل زیردریایی اجازه داد تا تنها سر و صدا حامل و فاصله آن را تعیین کند.
سرانجام ادغام سیستم های مختلف بر اساس کنترل EMM ساده شده بر کار و نگهداری گاز و مجاز به کاهش پرسنل خدمات، که برای جابجایی آب نسبتا کوچک زیردریایی دیزل مهم است.
این دستگاه اصلی ایستگاه آکوستیک بی صدا بودن با طیف وسیعی از چندین دهه کیلومتر است. در فرکانس پایین (220 هرتز - 7 KHZ) دامنه پذیرش سیگنال بر روی یک conformal (همراه با بخش های بدن مسکن) یک آنتن آکوستیک متشکل از هیدروفون پیزوکارامیک و در فرکانس بالا (8 کیلوهرتز) - بر روی یک آنتن استوانه ای با هیدروفون زیرکونات سرب، نزدیک کیل قرار گرفته است. آنتن استوانه ای نیز برای پیگیری چندین هدف (تا چهار) هدف قرار می گیرد. هر دو کانال افزونگی سر و صدا مکمل یکدیگر هستند. فضای اطراف آن توسط یک بررسی سریع سریع از تعداد زیادی از گلبرگ های تشکیل شده استاتیک از جهت گیری جهت گیری نادیده گرفته می شود. اهداف پر سر و صدا را با روش معادل دقت بالا شناسایی می کند.
این دستگاه فعال این امکان را برای انجام یک بررسی دایره ای با تابش Omnidirectional از یک بسته انجام داده است یا زمانی که مجموعه ای از بسته ها در جهت تغییر جهت ها، و همچنین قطعات تک در جهت خاص را منتشر می کنند. سیگنال های پذیرفته شده ECHO بر روی صفحه نمایشگر نمایش داده می شود و می تواند برای اندازه گیری تغییر فرکانس داپلر ثبت شود.
مسیر محل منفعل دارای سه آنتن دریافت شده است، نصب شده با مسکن در بینی، وسط و عقب، برای هر طرف زیردریایی. آنها اهداف سر و صدا را که تحت پردازش همبستگی قرار می گیرند، می گیرند، که امکان تعیین محل هدف را برای سه خط موقعیت با دقت کافی تعیین می کند. آنتن های مسیر را می توان به عنوان یک حذف اضافی برای مسیر استفاده کرد.
ایستگاه ارائه ارتباطات با صدا هدایت شده و غیر هدایت شده است.
مسیر تشخیص سیگنال هیدرولیکتورها به شما امکان می دهد سیگنال های پالس از ریشه های مختلف را در فاصله چند دهه کیلومتر تشخیص دهید، فرکانس، مدت زمان و جهت خود را به منبع سیگنال تعیین کنید.
در ساخت ایستگاه، مدارهای مجتمع به طور گسترده ای مورد استفاده قرار می گیرند، زیرا ابعاد و وزن آن کاهش می یابد، قابلیت اطمینان افزایش می یابد. داده های مربوط به اهداف بر روی دو صفحه نمایش داده می شود، به طور خودکار به AUM Auto-Packer یک سیستم تیراندازی اژدر منتقل می شود که دستورات برای شلیک تولید می شوند.
یک ایستگاه هیدروکلتیک ساده تر توسعه یافته است. این شامل مسیرهای سر و صدا، اکو و محل منفعل است. جستجو و تشخیص اهداف در حالت نویز با استفاده از روش اصلاح روش پردازش سیگنال انجام می شود. پس از آن هدف شناسایی می شود، فاصله تا آن را با تابش یک بسته تک جهت یا روش محل منفعل اندازه گیری می شود.
به منظور افزایش کارایی استفاده از ابزارهای مشاهده هیدرو اکوستیک در زیردریایی ها، ابزارها همچنین دستگاه هایی برای اندازه گیری سرعت انتشار صدا در آب و برای نشان دادن در مورد آغاز وقوع حفره پیچ های قایقرانی، دستگاه ها برای کنترل سطح سر و صدا خود دارند .
برای افزایش کارایی استفاده از گاز، یک دستگاه برای ساخت نقاشی های شعاعی با توجه به داده های ورودی بر توزیع واقعی سرعت انتشار صدا با افزایش عمق وجود دارد. این سیستم قادر به عملکرد در حالت شبیه ساز با شبیه سازی سیگنال های ورود به ورودی خود از اهداف مختلف است. تمام اطلاعات فعلی وارد سیستم در روند کار مبارزه خود شده و تولید شده توسط آن می تواند برای پخش و تجزیه و تحلیل پس از آن ثبت شده است. سیستم توسط یک یا دو اپراتور خدمت می شود.
گاز انواع دیگر دارای آنتن های پارتیشن استوانه ای است. برای یک منظره دایره ای، 96 گلبرگ از الگوی تابش، تشکیل شده است.
تعیین مختصات اهداف شناسایی و ردیابی به طور همزمان در تمام حالت ها با استفاده از یک کامپیوتر انجام می شود. در حالت فعال، برای به دست آوردن حداکثر طیف وسیعی از عمل، آن را برای هماهنگی پارامترهای تابشی (قدرت منتشر شده، فرکانس، نوع مدولاسیون بسته) با شرایط هیدرولوژیکی واقعی در منطقه مشاهده ارائه شده است.
در حالت تشخیص سیگنال ها. هیدرولیکاتورها توسط بلبرینگ بر منبع سیگنال، فرکانس و دامنه آن، مدت زمان پالس ها، فرکانس های زیر و طبقه بندی منابع تابش در امتداد کل این ویژگی ها تعیین می شوند.
ایستگاه همچنین می تواند در حالت های کمکی کار کند: شبیه ساز، درج و کنترل اتوماتیک شرایط فنی که تشخیص ماژول های معیوب را تضمین می کند.
تمام کنترل ها و دو صفحه نمایش بر روی کنسول گاز قرار دارد. در یکی از آنها با یک نشانه سه رنگ، که نشان دهنده یک شاخص بازبینی دایره ای است، به طور همزمان در بخش مرکزی نمایش داده می شود. تنظیم کامل با کشتی خود را در مرکز و مقیاس دایره ای از زنگ ها، و در لبه ها - اطلاعات متن کامل در مورد اهداف همراه ( فاصله، حامل، مقادیر تغییرات فرکانس داپلر، دوره ها، سرعت ها)، داده ها در مورد دوره و سرعت کشتی خود، در مورد حالت و پارامترهای عملیاتی گاز. ماتریس سلسله مراتبی متن بر روی صفحه نمایش دوم نمایش داده می شود، پردازش آن به شما اجازه می دهد تا فرایند کنترل تجهیزات را بهینه سازی کنید. چنین ارائه اطلاعات به طور قابل توجهی سرویس و عملیات ایستگاه را ساده می کند و به شما امکان می دهد این را به یک اپراتور انجام دهید.
در نوامبر سال 1983، APL ویکتور III یک وظیفه برای حذف سر و صدا و سایر ویژگی های چهارم موشک های اوهایو آمریکا را دریافت کرد.
به گفته خدمه، کاپیتان جوان بلند پروازانه زیردریایی ما، الهام گرفته از نمونه های قهرمانان و زیردریایی های جنگ میهنی، تصمیم گرفت تا تقریبا به خلیج پایه Sugostite برود.
برای پنهان سازی آکوستیک، K-324 در Sargasso Sea در زیر یک کشتی کوچک بود که به دنبال دوره مناسب بود. همه چیز خوب بود، به طور ناگهانی سرعت PL. به سرعت به سرعت سقوط کرد، علیرغم افزایش توربین به حداکثر می رسد.
هیچ راه اندازی و حدس زدن خدمه به نتایج مثبت منجر نمی شود - سرعت به سه گره کاهش یافت.
ما می توانیم هر کاری را انجام دهیم - مجبور شدم شناور کنم. به نظر می رسد تقریبا در ذهن بانک های ایالات متحده، در خود "Lair"، به طوری که صحبت کنید.
برای بازرسی از پیچ اصلی، مخازن بینی پر از آن، قایق به دست آورد دیفرانسیل مناسب در بینی و یک تیم اضطراری، مسلح به دو "Kalashnikov" و دو PM (تمام زرادخانه موجود در زیردریایی شوروی) خوراک را مورد بررسی قرار داد بخشی. بنابراین، این است، برخی از کابل ها به زخمی شدن در شفت، بسیار با دوام، نه ترک، نه صف های اتوماتیک: تمام تلاش ها بیهوده بود.
فرمانده این تصمیم را پذیرفت - برای رفتن به کوبا در موقعیت یک شبه. پس از آن او بود و خلبانان آمریکایی، ملوانان و گردشگران را در قایق بادبانی لذت بردند.
با غم و اندوه به نصف به کوبا، دلزیلی. فرمانده بلافاصله به "فرش" دعوت کرد. اما، بر خلاف فرض های غم انگیز در مورد سرنوشت او، کاپیتان "در اسب" بازگشت، کاپیتان بر روی پیچ توسط زیردریایی ناامید شده بازگشت، تبدیل به چیزی بیش از جدیدترین آنتن های آبیاری آمریکایی بود که آمریکایی های بی دقتی مورد آزمایش قرار گرفتند یک کشتی ناخوشایند
دانشمندان و تکنسین های ما مواد ارزشمند را برای کشف ...

اورژانس PL K-324 در Sargasso Sea
از کتاب نبرد برای ستاره ها 2. مقابله فضایی (قسمت دوم) نویسنده Perhearsh Anton Ivanovichمبارزه با مجتمع های مداری برای "بورانا" ما به یاد می آوریم که مجتمع موشک و فضایی انرژی بوران بر اساس درخواست وزارت دفاع برای حل مشکلات نظامی در فضای نزدیک ایجاد شد. واضح است که در یک زمان بارهای پیچیده با مجموعه پیچیده توسعه یافت
از مدیریت کیفیت کتاب نویسنده شوچوک دنیس الکساندروویچ1.2 مدیریت کیفیت به عنوان یک عامل موفقیت شرکت در اقتصاد بازار رقابت رقابتی به عنوان یکی از از ویژگی های مهم ترین شامل رقابت بین موضوعات و اشیاء بازار است. تحت رقابت درک رقابت بین افراد یا
از کتاب های رزمی کتاب جهان به نوبه خود قرن ها - XXI قرن ها، قسمت سوم Friges نویسنده Apalkov Yuri Valentinovichایالات متحده آمریکا سیستم های موشک ضد هواپیما و اصلی TTX "استاندارد * SM-1" استاندارد "SM-2 MK 57 ناتو" Sea Sparrow "" Sea Chapparel "کشور توسعه دهنده ایالات متحده آمریکا عمومی Dinamics Corporation، بخش دفاع هوایی ایالات متحده آمریکا عمومی Dinamics Corporation، دفاع هوایی بخش ایالات متحده آمریکا. Nato Raytheon سیستم های الکترونیکی، Hughes Missile Systems Company ایالات متحده آمریکا Lockheed Martin Aeronutronic
از کتاب سومین زیردریایی دیزل الکتریکی از ساخت و ساز پس از جنگ نویسنده Gagin Vladimir vladimirovichترکیبات موشک های موشک ضد زیردریایی و اصلی TTX "Mail-B" "Floor-B" "آبشار" "Medveda" ASROC CY-1 Milastrastrance شرکت از روسیه Raduboga روسیه "Northator" روسیه "Mirteplyekheni-ka" ما مارتین مارتین سیستم های دفاع تاکتیکی چین CMTIEC پذیرش Gie Milas
از کتاب. سلاح های موشک داخلی نویسنده اول، میخائیل Andreevichبرخی از جنبه های مبارزه ضد زیردریایی نیروهای زیر آب پس از جنگ جهانی دوم تحت تغییرات کیفی اساسی قرار گرفته اند. زیردریایی ها از غواصی در کشتی های واقعا زیر آب، خودمختاری، عمق غوطه وری، سرعت و محدوده
از کتاب. مجتمع های ضد تانک داخلی نویسنده فرشته Rostislav Dmitrievichسیستم های موشک ضد هوایی هواپیما R-101R -101 (P-102) موشک کنترل کننده ضد هواپیما را کنترل می کنند. مجهز به امداد طراحی شده در نیمه دوم 40s. در NII-88 بر اساس اسباب بازی های ضد هوایی آلمانی "Wasserfal". آزمایشات در سال 1948 برگزار شد. طراح اصلی - یوجین
از کتاب خودروهای مخفی ارتش شوروی نویسنده Kochnev Evgeniy Dmitrievichسیستم های موشکی ضد هوایی دریایی B-753 "Volkhov" M-2. B-753 (13DM) یک موشک موشک ضد هوایی دریایی آزمایشی M-2 با یک موشک کنترل شده دو مرحله ای مجهز به Marshus EDD و شروع RDTT. بر اساس زمین S-75 SPC ایجاد شده است. توسعه دهنده پیچیده - CKB
از کتاب حمل و نقل هوایی در جنگ های محلی توسط Babich V.K.سیستم های موشکی ضد هوایی قابل حمل "سوزن" (عکس از مجله "رژه نظامی") "Strela-2" "Strela-2M" "Strela-2" 9K32. 9M32 مجتمع موشک ضد هوایی قابل حمل 9K32 با یک موشک معدن سوخت جامد کنترل شده است. اولین SPC قابل حمل داخلی. طراحی شده
از کتاب خانه های الکترونیکی توسط Kashkarov A. P.مجتمع های ضد موشکی A. B-1000Opped (چند ضلعی) سیستم دفاع ضد موشکی "A" با دفاع موشکی در 1000. اولین سیستم داخلی داخلی. این در چند ضلعی سارا شقان مستقر شد. شکست یک موشک بالستیک تک بلوک از محدوده متوسط \u200b\u200bرا فراهم کرد.
از کتاب فلزی قرن نویسنده نیکولایف گرگوری ایلیچمجتمع های ضد تانک نسل دوم "Fagot" در سال 1963 تصویب شد، مجتمع ضد تانک مالتکا به طور عمده به الزامات نیروهای نظامی پاسخ داد و در آینده به طور مثبت خود را به عنوان یک سلاح موثر در جنگ های محلی ثابت کرد. با این حال، و
از تکامل کتاب سیستم های ضد زیردریایی کشتی های داخلی توسط Kazakin Leonidسیستم های موشک ضد تانک از دهه نود در اواسط دهه هشتاد، همراه با کار در مدرنیزاسیون مجتمع های ضد تانک قبلا ایجاد شده، به طور عمده به منظور تضمین امکان شکست دادن اهداف مدرن با افزایش یافته است
از کتاب نویسندهموشک های متحرک و توپخانه های توپخانه اولین پرتاب BR-264 برای نصب در شاسی خودرو در کارخانه Barricade در سپتامبر 1961 ایجاد شد و بخشی از PCC 9K71 "Temp" تجربی بود که با موشک سوخت جامد 9M71، که با آن توسعه یافت، بود
از کتاب نویسنده3. در مبارزه برای بقا در جنگ های محلی، همانطور که اشاره شد، میزان بقا توسط کارشناسان خارجی از لحاظ ضرر ارزیابی شد - نسبت تعداد هواپیماهای هواپیما به تعداد هواپیماهای مرتب شده. به عنوان مثال، سطح از دست دادن اسکادران تاکتیکی،
از کتاب نویسنده4.8.2. تکنیک های موثر در مبارزه با دخالت در مبارزه با سر و صدا در حال اجرا از طریق خط، بهتر است ترکیب فیلتر های خطی RF و سرکوب کننده فرآیندهای گذرا در خط AC. این روش را می توان با تداخل 60 دسی بل در فرکانس ها به دست آورد
از کتاب نویسندهفصل 1. در مبارزه با خوردگی علم فلزات در جهان هیچ چیز ابدی وجود ندارد - همه این حقیقت غیرقانونی را برای مدت زمان طولانی می دانند. چه چیزی به نظر می رسد برای همیشه غیر قابل انعطاف است - کوه ها، بلوک های گرانیت، کل قاره ها، - در نهایت نابود شده، پراکنده به گرد و غبار، رفتن به زیر آب، سقوط به عمق.
از کتاب نویسندهمجتمع های موشک ضد زیردریایی قبلا ذکر شده است، با ظهور زیردریایی های هسته ای در دهه 1950، سیستم های سلاح های جدید مورد نیاز بود، قادر به رسیدن به اهداف زیر آب در محدوده وسیعی بود. در اتحاد جماهیر شوروی، کار در این راستا با توجه به آن آغاز شد
در آینده قابل پیش بینی، زیردریایی ها و هواپیماهای ضد زیردریایی نیروی دریایی روسیه باید سیستم های هیدرواستاتیک نوع جدید را بدست آورند. با توجه به آخرین گزارش ها، تا پایان دهه، اداره نظامی قصد دارد تعداد زیادی از ردیابی را برای وضعیت زیر آب بدست آورد. چنین خریدهای اجازه می دهد تا ابزار مدرن تشخیص بسیاری از افراد تحت ساخت و یا زیردریایی های مدرن، هواپیما و غیره را تجهیز کند.
در پایان ماه مارس، یک نظم جدید در وب سایت رسمی تدارکات دولتی توسط وزارت دفاع در مورد توسعه بیشتر بخش مادی نیروی دریایی قرار گرفت. براساس اطلاعات مناقصه منتشر شده، وزارتخانه قصد دارد 55 مجتمع آبیاری (GAK) خانواده MHK-335EM-03 "Kryakva" را در تغییرات مختلف خریداری کند. برای خرید تمام محصولات مورد نیاز، اداره نظامی قصد دارد بیش از 194.6 میلیون روبل را صرف کند - به طور متوسط \u200b\u200bبیش از 5.3 میلیون در هر مجتمع. اولین مجتمع ها به عنوان بخشی از نظم آینده باید در سال جاری عرضه شود. تکمیل تحویل برای سال 2019 برنامه ریزی شده است.
طرح کلی مجموعه MGK-335EM-05
براساس داده های منتشر شده، نیروهای مسلح قصد دارند مجتمع های "Kryakva" سه اصلاح را خریداری کنند که به آنها اجازه می دهد تا زیردریایی ها، هواپیماهای ضد زیردریایی و سیستم های ثابت را تجهیز کنند. برای نیروهای زیر آب، 16 مجتمع Kryakva-A خریداری شده است. همان تعداد سیستم ها باید حمل و نقل هوایی دریایی را دریافت کنند. 23 مجموعه نسخه Kryakva-B برای ایستگاه های اکتشافی هیدرواستاتیک خریداری خواهد شد.
برنامه های کاربردی برای مناقصه تا آوریل 17 پذیرفته می شوند. به زودی پس از آن، قرارداد عرضه محصولات مورد نیاز امضا خواهد شد، پس از آن تولید آنها شروع می شود. همانطور که ذکر شد، اداره نظامی می خواهد اولین مجتمع های هیدرواستاتیک انواع مورد نیاز را در سال جاری به دست آورد.
بر اساس گزارش ها، MGK-335EM-03 "Kryakva" پیچیده "Kryakva" توسط نگرانی "oceanpribor" (سنت پترزبورگ) ایجاد شد. این مجموعه برای نصب در وسایل نقلیه کوچک و متوسط \u200b\u200bطراحی شده است. امکان نصب تمام تجهیزات لازم در طول ساخت کشتی ها و در طول تعمیر و ارتقاء وجود دارد. در مورد دوم، سیستم Kryakva جایگزینی برای مجتمع MGK-355MS قدیمی تر است. بر اساس گزارش ها، تغییرات جدید طراحی شده برای عملیات در رسانه های دیگر بر اساس مجتمع کشتی ایجاد شد. به عنوان یک نتیجه، گاز خانواده Kryakva نیز می تواند توسط زیردریایی ها، هواپیما و سیستم های اطلاعاتی ثابت استفاده شود.
صرف نظر از حامل، مجتمع ها وظایف مشابهی دارند و به عنوان یکپارچه سازی می شوند. وظیفه اصلی آنها جستجو برای زیردریایی ها است. تشخیص اهداف در حالت فعال با استفاده از Exoolocation یا در منفعل انجام می شود - در این مورد، سر و صدای خود را ردیابی می شود. علاوه بر این، امکان تشخیص سیگنال های دیگر مجتمع های فعال در حالت فعال وجود دارد. همچنین اتوماسیون "Mallards" قادر به مستقل همراه با هدف و انتشار داده ها به تعیین هدف در کنترل تیراندازی حامل مبارزه با تیراندازی با تیراندازی حامل. ممکن است طبقه بندی شیء شناسایی را به صورت خودکار انجام دهید. مجتمع های MGK-335EM-03 "Kryakva" دارای عملکرد پیوند هیدروکلتیک در فرکانس های کم و بالا هستند. همچنین برای استفاده از ارتباطات کد و شناسایی فراهم می کند.

معماری GAK MGK-335EM-03
به منظور افزایش ویژگی های عملیاتی، مجتمع ها دارای تعدادی از ویژگی های مهم و توابع هستند. در طول عملیات پیچیده آبی، کنترل اتوماتیک سطح تداخل آکوستیک انجام می شود. اتوماسیون قادر به پیش بینی محدوده مورد انتظار سیستم بسته به شرایط کنونی است. کنترل های خودکار برای استفاده از تمام اجزای پیچیده وجود دارد و وضعیت آنها را دنبال می کنند. اتوماسیون به طور مستقل عملیات جمع آوری را دنبال می کند و تشخیص می دهد. در صورت تشخیص مشکلات در حالت اتوماتیک، محلی سازی آنها انجام می شود. عملکرد اپراتورهای آموزشی وجود دارد که طی آن اهداف تقلید استفاده می شود.
که در پیکربندی پایهدر نظر گرفته شده برای نصب بر روی کشتی های سطحی، GAK MGK-335EM-03 "Kryakva" شامل چندین دستگاه اصلی در ترکیب آن حل وظایف مختلف است. اصلی و تنها ابزار مشاهده و شناسایی اهداف در این مورد یک آنتن فعال-منفعل است. این در قالب یک بدن استوانه ای مجهز به تعداد زیادی از عناصر حساس ساخته شده است. برای حفظ موقعیت آنتن مورد نظر در طول عملیات، یک سیستم تعلیق خاص با دستگاه های تثبیت کننده استفاده می شود. آنتن ارتفاع 1 متر و قطر 1 متر دارد. دایره سیلندر 36 ستون با 12 عنصر در هر کدام قرار دارد.
همچنین در هیئت مدیره کشتی حمل و نقل، دستگاه ژنراتور، دستگاه دریافت و تقویت و تطبیق دستگاه، و همچنین دستگاه های پردازش سیگنال دیجیتال و دستگاه های کنترل کنترل و تثبیت نیز نصب شده است. تمام این عناصر این مجموعه متصل هستند. تامین برق به تمام اجزای مجتمع با کمک یک دستگاه برق جداگانه متصل به سیستم های الکتریکی عمومی چارچوب انجام می شود.
در محل کار اپراتور پیچیده، پیشنهاد شده است تا از راه دور با تمام کنترل های لازم استفاده شود. داده های مربوط به وضعیت زیر آب، اهداف شناسایی شده و بهره برداری از بودجه های هیدروکلتیک در دو مانیتور رنگی نمایش داده می شود. سازمان های اصلی کنترل اصلی صفحه کلید و trackball قرار داده شده در کنسول جلو. بخشی از دکمه ها و سوئیچ ها در کنار مانیتور قرار می گیرند. توسعه دهنده سیستم Kryakva نیز پیشنهاد شده است از یک شاخص از راه دور استفاده کند. در برخی از فاصله از کنسول اصلی، یک مانیتور اضافی که اطلاعات مربوط به تنظیمات فعلی را نمایش می دهد می تواند نصب شود.

آنتن پلاگین "Mallard"
بر اساس گزارش ها، خانواده Kryakva شامل مجتمع های هیدرواستاتیک چند مدل، متفاوت از یکدیگر با ترکیب تجهیزات ویژه، عمدتا آنتن ها و سایر روش های تشخیص است. بنابراین، در پروژه MGK-335EM-01، آنتن Podloile توسط یک آنتن انعطاف پذیر انعطاف پذیر تکمیل شده است. مجتمع MGK-335EM-02 دارای یک فرمت و انعطاف پذیر انعطاف پذیر و انعطاف پذیر است. محصول MGK-335EM-04 با یک محدوده فرکانس پیشرفته زمانی که در حالت فعال فعال می شود، مشخص می شود که اجازه می دهد تا تشخیص اژدها ها را تشخیص دهد و نسخه های "Mallard" MGK-335EM-05 آنتن را کاهش داده و منتشر کرده است.
با توجه به اطلاعات رسمی نگرانی "OceanPribor"، MGK-335EM-03 GAK "Kryakva" قادر به تشخیص زیردریایی با شعاع معادل Re \u003d 10 متر در فاصله تا 10-12 کیلومتر است. مختصات هدف با دقت 30 'بر روی بلبرینگ تعیین می شود. دقت فاصله به 1٪ از فاصله فاصله می رسد. در حالت سر و صدای تخلیه، این مجموعه قادر به ضبط صداها با فرکانس 1.5 تا 7 کیلوهرتز است. پس از تشخیص هدف و آن را به همراهی، دقت تعریف تحمل 30 'است. حالت تشخیص سیگنال های هیدرو سیاتیک، که نشان دهنده تشخیص گاز فعال فعال در حالت فعال است، به شما اجازه می دهد تا محدوده فرکانس 1.5-7 KHz را کنترل کنید. بلبرینگ بر روی منبع سیگنال شناسایی شده با دقت تا 10 درجه تعیین می شود.
تجزیه و تحلیل ماهیت سیگنال های بازتابنده یا دستگیر شده دریافت شده، مجتمع MGK-335EM-03 می تواند متعلق به یک شیء شناسایی را به یک کلاس یا یک کلاس دیگر از تکنولوژی تعیین کند. با کمک اپراتور، مجتمع هیدروکلتیک قادر به تشخیص زیردریایی از اژدر است. در عین حال، ممکن است به طور همزمان یک هدف هدف را به سیستم های سلاح های ضد فشار برساند.
مجتمع Kryakva با ویژگی های نسبتا بالایی از ارتباطات هیدرواستاتیک مشخص می شود و همچنین دارای ویژگی های خاصی است. ارتباط کم فرکانس یا فرکانس بالا در محدوده تا 20 کیلومتر انجام می شود. ارتباط کد، شناسایی یک شیء شناسایی شده یا تغییر در فاصله تا آن را می توان در فاصله تا 30 کیلومتر انجام داد. با MHK-335EM-03 GAK، خدمه کشتی حمل می تواند پشتیبانی کند ارتباط تلفنی هر دو با زیردریایی های روسی و کشتی ها با استفاده از محدوده فرکانس ناتو.

مجتمع کنترل پنل
با توجه به آخرین، در سال 2017-19، نیروی دریایی باید 55 کیت از خانواده MHK-335EM-03 "Kryakva" را دریافت کند پیکربندی های مختلفدر نظر گرفته شده برای نصب در رسانه های کلاس های مختلف. اکثر این تجهیزات برنامه ریزی شده در ایستگاه های اکتشافی هیدروسیک نصب شده است، در حالی که سایر مجتمع ها توسط زیردریایی ها و هواپیما استفاده می شود. اطلاعات دقیق در مورد حامل های آینده مجتمع های سفارش شده، به دلایل واضح، این لحظه بدون گم شدن در حالی که تنها برای ساختن پیش بینی ها باقی می ماند و سعی می کنید دقیقا چه تکنیک را با چنین تجهیزاتی مجهز کنید.
در مورد هواپیمایی ضد زیردریایی، IL-38 و TU-142 آخرین تغییرات را می توان حامل های احتمالی در نظر گرفت. در حال حاضر این تکنیک تعمیر و مدرنیزاسیون، که در طی آن تجهیزات مختلف جدید دریافت می شود. به روز رسانی پروژه های بعدی همچنین می تواند از آخرین سیستم های هیدروکوستیک استفاده کند.
16 مجتمع در پیکربندی زیردریایی خریداری خواهد شد. احتمالا این تجهیزات در تعمیرات آینده کشتی های موجود از پروژه های نسبتا قدیمی استفاده می شود. با توجه به سن و تجهیز زیردریایی های متشکل از زیردریایی ها، می توان فرض کرد که هر زیردریایی اتمی داخلی و دیزل الکتریکی تمام پروژه های موجود می تواند به حامل های بالقوه سیستم های "Kryakva" تبدیل شود. نه همه کشتی های نیروهای زیر آب روسیه با ابزار مدرن نظارت بر وضعیت زیر آب مجهز نیستند، به همین دلیل محصولات جدید مشابه نیاز دارند. به عنوان تعمیر، آنها قادر به دریافت دستگاه های جدید با ویژگی های بالا هستند.
کنجکاو است که در شرایط مناقصه فعلی هیچ نقطه ای برای خرید مجتمع های هیدروکوستاتیک برای نصب بر روی کشتی های سطحی وجود ندارد. محصول MGK-335EM-03 در ابتدا دقیقا به عنوان یک کشتی از مشاهدات طراحی شده بود و تنها پس از آن توسعه یافت، به عنوان یک نتیجه از آن ممکن بود نصب شده بر روی حامل های دیگر. با توجه به برخی از دلایل کاملا قابل فهم در نزدیکترین برنامه های اداره نظامی، خرید گاک گاز کشتی Kryakva.

طرح مجتمع کشتی MGK-335EM-05 با یک آنتن پایین اضافی
به گفته رسانه های داخلی، در حال حاضر شناخته شده است که در آن مجتمع های هیدروسیت های خریداری شده است. محصولات حاصل از محصولات وزارت دفاع بین چندین ترکیبات هوایی دریایی و هواپیمایی دریایی مسئول اجرای دفاع ضد آتتیک توزیع می شود. این تجهیزات به Kronstadt، Severomorsk و Novorossiysk، و همچنین برخی از پایه های قلمرو Primorsky بروید. جزئیات دیگر عملیات آینده سیستم های امیدوار کننده هنوز ارتباط برقرار نمی شود.
از داده های موجود به این معنی است که تجهیزات زیردریایی ها، هواپیما و سیستم های هیدرو اکوسیستی ثابت با مجتمع های جدید خانواده MGK-335EM-03 "Kryakva" پیامدهای مثبتی برای کل دفاع ضد زیردریایی ناوگان به عنوان یک کل خواهد داشت. در طول ساخت و ساز یا نوسازی زیردریایی، هواپیما و غیره این تجهیزات مدرن را برای ردیابی اشیاء زیر آب دریافت می کند که بر اساس کارایی کار آنها ظاهر می شود. در نتیجه، محدوده و احتمال تشخیص اشیاء بالقوه خطرناک به طور قابل توجهی افزایش می یابد.
علاوه بر وظایف اصلی مربوط به تشخیص و نگهداری اشیاء مختلف، گاز جدید را می توان برای شناسایی اهداف یافت شده، صدور سیستم های مدیریت هدفمند و غیره استفاده کرد. همچنین رژیم آموزشی را پیش بینی کرد که آمادگی اپراتورهای هیدرو اکسی را تسهیل می کند.
براساس اطلاعات رسمی، در اواسط ماه آوریل، اداره نظامی، پذیرش برنامه های کاربردی را برای مناقصه اخیرا راه اندازی کرده و شروع به انتخاب تامین کننده تجهیزات مورد نیاز خواهد کرد. به زودی باید توافق برای عرضه وجود داشته باشد، پس از آن مسئله سریال GAC نیاز به تغییرات لازم را آغاز خواهد کرد. اولین نمونه های این تجهیزات در حال حاضر برنامه ریزی شده در سال جاری، دومی - نه بعد از پایان سال 2019. بدیهی است، عرضه چنین محصولاتی به طور همزمان با ساخت و ساز / نوسازی حامل های آنها انجام می شود. این بدان معنی است که نه بعد از آغاز دهه آینده، دفاع داخلی ضد زیردریایی تجهیزات جدیدی را دریافت می کند و با فرصت های جدید آن. همه اینها به طور کلی بر پتانسیل نیروی دریایی به طور کلی تاثیر می گذارد.
با توجه به مواد سایت ها:
http://zakupki.gov.ru/
http://i-mash.ru/
http://oceanpribor.ru/
http://armsdata.net/
http://flot.com/
این اختراع مربوط به زمینه هیدروسیتاتیک است و می تواند به عنوان یک جنگنده هیدرواستاتیک زیردریایی های مقاصد مختلف، و همچنین در طول آثار زمین شناسی و هیدروسیتاتیک زیر آب و تحقیقات مورد استفاده قرار گیرد.
مجتمع های هیدروسیتتیک (گاز) اساس حمایت اطلاعاتی زیردریایی ها هستند. گاز معمولی شامل مسیرهای زیر می شود (ایستگاه های آبی) و سیستم ها:
بی سر و صدا (SP)، استقرار، به طور عمده، وظایف تشخیص زیردریایی ها و کشتی های سطحی؛
هیدرولیز (CH)، که در حالت فعال تشخیص هدف زیر آب در فاصله بالایی عمل می کند؛
تشخیص سیگنال های هیدروکلتیک (OGS) طراحی شده برای تشخیص کسانی که در محدوده های مختلف هیدرولیکتورها عمل می کنند؛
صدا و شناسایی؛
Ministands (MI)، که در عین حال ویژگی های تشخیص موانع را در نزدیکی زیردریایی انجام می دهد؛
مرکزی سیستم محاسباتی (CCC)؛
نمایش، ثبت نام، مستند سازی و سیستم مدیریت (SORPP).
ترکیب هر مسیر شامل آنتن های آکوستیک است. دستگاه های ژنراتور به آنتن های رادیویی متصل می شوند و با دریافت دستگاه های پیش پردازش.
زیردریایی GSU 90 شناخته شده است، توسط STN Atlas Electronic (آلمان)، حاوی HP، CP، OGS، ارتباطات و MI و CVS، Sorg و کل تایر توسعه یافته است.
نشانه هایی که با گاز ادعا شده مشترک هستند، همه اجزای این آنالوگ هستند.
دلایل پیشگیری از دستاورد در این آنالوگ نتایج فنی به دست آمده در اختراع، سطح نسبتا بالایی از تداخل هیدرودینامیکی و سر و صدا قایق و عدم امکان مستقل و همزمان کارگران و ارتباطات صوتی و شناسایی صدا است ، و همچنین یک فرکانس نسبتا باریک از سیگنال های متصل شده است.
از این کاستی ها، گاز آزاد است، محافظت شده توسط گواهی فدراسیون روسیه شماره 20388 برای یک مدل ابزار، IPC G01S 3/80، 15/00، 2001. این آنالوگ شامل تمام اجزای اولین آنالوگ، با این حال، آنتن پهنای باند غیر جهته را منتشر کرد و علاوه بر آن به مسیر توزیع و شناسایی آن معرفی می شود. دستگاه ژنراتور و در دستگاه های OGS - آنتن های با فرکانس بالا و پهنای باند و یک دستگاه پیش از درمان، در حالی که تمام آنتن های آکوستیک در مناظر بینی قرار می گیرند یا در حصار برش.
تمام اجزای این آنالوگ، و همچنین اجزای اول آنالوگ، در ترکیب گاز پیشنهادی گنجانده شده است.
دلایل جلوگیری از دستاورد در این آنالوگ نتایج فنی به دست آمده در اختراع به شرح زیر است:
یک مرور کلی از آنتن اصلی دستگاه HP، به دلیل تیره شدن گوشه های تغذیه با پرونده؛
اندازه محدود آنتن اصلی بینی اجازه نمی دهد که منابع سیگنال ها را محلی سازی کنند، محدوده فرکانس آن کمتر از 0.8-1.0 کیلوهرتز قرار دارد؛
تنها آنتن از مسیر دست، یک بخش محدود و نسبتا باریک از تابش فضا در محفظه بینی دارد؛
آنتن بینی بینی از مسیر ارتباطی و شناسایی توسط بدن سایه دار است، که پیوند را با خبرنگاران در بخش بخش های خوراک حذف می کند؛
پذیرش سیگنال های دستگاه OGS بر روی یک آنتن با یک ویژگی چند منظوره از جهت (XN) مانع از طراحی پرینگ بینی می شود؛
آنتن فرکانس بالا متمرکز از مسیر OGS سایه طراحی حصار حصار است.
نزدیک ترین ماهیت فنی به ادعا (نمونه اولیه) یک گاز زیردریایی است که توسط ثبت اختراع فدراسیون روسیه شماره 24736 برای مدل ابزار، CL محافظت می شود. G01S 15/00، 2002. این شامل مسیرهای اصلی و اضافی SP، دستگاه OGS، دستگاه HL، ترافیک ارتباطات و شناسایی، مسیر وزارتخانه و تشخیص موانع ناوبری (MI)، CVS، Sorg و تایر کل
مرکز اصلی SP شامل آنتن اصلی دریافت کننده بینی است که با امکان تشکیل یک ویژگی فدراسیون استاتیک در هواپیماهای افقی و عمودی ساخته شده است و اولین دستگاه پیش درمان شده در کپسول داخل آنتن قرار دارد.
این دستگاه SP اضافی حاوی آنتن انعطاف پذیر انعطاف پذیر (GPBA)، کابل کابل، یک دستگاه جمع کننده فعلی و یک دستگاه پیش پردازش است.
مسیر OGS شامل سه آنتن دریافت کننده و پیش پردازش دستگاه است. آنتن اول در قسمت بینی حصار برش قرار می گیرد و دارای یک XN چندگانه است. آنتن دوم در بخش خوراک حصار برش قرار می گیرد و Omnidirectional و فرکانس بالا است. آنتن سوم پهنای باند است و بلوک های آن در مناظر بینی قرار می گیرند، در قسمت ستون از حصار برش و در دو طرف زیردریایی قرار می گیرند.
مسیر هیدرولیکی شامل یک آنتن کشتار کشتار است که در قسمت بینی از حصار برش، دو آنتن های حمل و نقل داخلی قرار گرفته است که در هر دو طرف زیردریایی قرار دارد و دستگاه ژنراتور.
مسیر ارتباطی و شناسایی حاوی آنتن بینی بینی است، قرار داده شده در یک بینی به پوشیدن، آنتن رادیویی تغذیه، قرار داده شده در حصار برش، و دستگاه ژنراتور.
این دستگاه شامل یک آنتن گیرنده دریافت کننده است که با امکان چرخش HN در هواپیما عمودی و دستگاه تولید، سوئیچ "دریافت" و دستگاه پیش پردازش ساخته شده است.
Sorf دستگاه از حذف دوگانه با دستگاه های جانبی متصل شده ساخته شده است. ورودی ها و خروجی ها به طور مستقیم به CVS متصل می شوند.
از طریق تایر کل، دستگاه های ژنراتور و دستگاه های پیش پردازش تمام مسیرها به CVC و Soror متصل می شوند.
نشانه هایی که با نشانه های گاز پیشنهادی رایج هستند، همه اجزای مجتمع نمونه اولیه و ارتباط بین آنها ذکر شده است.
دلیل آن که دستاوردهای نتایج فنی به دست آمده در نمونه اولیه پیچیده به دست آمده در اختراع به دست آمده، یک محرمانه نسبتا کم از این مجموعه است.
دلیل دیگری که مانع از نتیجه نتیجه نشان داده شده، دامنه کافی از اهداف زیر آب در حالت HL است.
هر دو این دلایل به علت این واقعیت است که آنتن های مسیر HL به طور همزمان یک سیگنال را در تقریبا تمام جهات منتشر می کنند، هرچند سیگنال و پالس. واقعیت این است که هر سه آنتن از مسیر CL دارای XN نسبتا گسترده ای برای جلوگیری از بخش کار، به استثنای گوشه های خوراکی است. این به شما این امکان را می دهد که از تقریبا هر بخش، تابش را تشخیص دهید، که به طور قابل توجهی احتمال تشخیص زیردریایی را افزایش می دهد. از سوی دیگر، عرض بزرگی از HN از آنتن منجر به کاهش ضریب افزایش آن می شود و بنابراین قدرت سیگنال منتشر شده، که به معنی دامنه هدف است که این قدرت برای تشخیص اعتماد به نفس آن کافی است .
وظیفه فنی، در راه حل این اختراع، افزایش عرض عملیات گاز و طیف وسیعی از تشخیص اهداف در حالت HL است.
نتیجه فنی به دست آمده از این واقعیت است که در GA شناخته شده، تمام آنتن های رادیویی از دستگاه HL به صورت الکترونیکی توسط تعداد اشعه XN و عرض و جهت آنها کنترل می شوند، در حالی که ورودی های کنترل این آنتن ها از طریق کل متصل می شوند اتوبوس متصل به CSW و Sorg، تعداد اشعه XN هر یک از آنتن ها هر واحد، بیش از تعداد این اهداف آنتن، و عرض آنها حداقل ممکن است، اما کافی برای ضبط و نگهداری اطمینان از هدف، در حالی که یک کافی است از اشعه HN دارای عرض کافی برای ضبط هدف اسکورت است و گوشه ای را در آنتن های بخش مسئولیت مشخص شده اسکن می کند و اشعه های باقی مانده آنتن های HN همراه با هدف شناسایی شده شناسایی شده است.
برای دستیابی به یک نتیجه فنی در GAC حاوی مسیر SP اصلی، دستگاه SP اضافی، مسیر OGS، مسیر HL، دستگاه ارتباط و شناسایی، مسیر MI، CVS، Sorf و کل تایر، در حالی که این تجهیزات با حذف لغزش دوگانه با دستگاه های جانبی متصل شده راضی و با CVS محدود می شود، مسیر اصلی HP حاوی آنتن دریافت کننده اصلی بینی است که با امکان تشکیل یک فدراسیون استاتیک در هواپیماهای افقی و عمودی و اولین دستگاه پیش پردازش ساخته شده است ، قرار داده شده در کپسول داخل آنتن و به طور مستقیم به خروجی آنتن متصل شده و خروجی - از طریق کل تایر با CVS و Sorg، مسیر OGS شامل اولین آنتن در بخش بینی از حصار برش و داشتن یک چند درمان HN، آنتن دوم، قرار داده شده در بخش خوراک حصار برش و یک آنتن بالا و خارج از منزل، آنتن سوم، بلوک های آن در بخش تغذیه بینی از حصار برش برش و در طرفین قرار دارد قایق دو طرفه که پهنای باند و دومین دستگاه پیش پردازش است، ورودی های سیگنال آن به طور مستقیم به خروجی های آنتن های مناسب مسیر OGS و ورودی و خروجی کنترل - از طریق یک تایر کل با CVS و SUROR، مسیر CL حاوی یک آنتن تخریب بینی قرار داده شده در نرده های برش بینی، دو آنتن های رادیویی بر روی هیئت مدیره، قرار داده شده در هر دو طرف زیردریایی، و دستگاه اول ژنراتور، خروجی هایی که به سیگنال متصل می شوند ورودی های آنتن های مربوطه از مسیر HL و ورودی کنترل - از طریق یک تایر کل با CVS و Sorg، مسیر ارتباطی و شناسایی شامل یک آنتن رادیویی که در کوپر مبتنی بر بینی قرار می گیرد، آنتن خوراک خورده شده، قرار داده شده است در حصار برش، و دستگاه ژنراتور دوم، خروجی هایی که به ورودی های سیگنال آنتن های منتشر شده از مسیر ارتباطی و شناسایی متصل می شوند و ورودی کنترل - از طریق یک تایر کل با CVS و Sorg، این دستگاه شامل می شود دریافت آنتن فرستنده دریافت شده UH با امکان چرخش HN در هواپیما عمودی و ژنراتور سوم قرار داده شده در بینی، ژنراتور سوم، که به خروجی ورودی آنتن مسیر از طریق سوئیچ پذیرش متصل می شود و ورودی کنترل - از طریق یک کل تایر با CVS و Sorg، و سومین دستگاه پیش پردازش، ورودی که به طور مستقیم به خروجی آنتن فرستنده دریافت می شود، و خروجی - از طریق کل تایر با CCC و Sorp، مسیر SPP اضافی شامل GPB، از طریق کابل کابل و دستگاه جمع آوری فعلی متصل به دستگاه پیش پردازش چهارم متصل به خروجی آن از طریق یک تایر کل با CCL و Sorg، تمام آنتن های تابشی از مسیر هیدرولیکی ساخته شده است با تعداد اشعه XN و عرض و جهت آنها، در حالی که ورودی های کنترل این آنتن ها از طریق کل اتوبوس متصل به CSW و Sorrod متصل می شوند، تعداد اشعه های HN هر یک از هر یک از هر آنتن هر واحد بیشتر از تعداد همراهی است با این اهداف آنتن، و عرض آنها حداقل ممکن است، اما دقیقا برای ضبط و نگهداری اطمینان از هدف دقیق است، در حالی که یکی از اشعه XN دارای عرض کافی برای گرفتن هدف اسکورت است و یک آنتن را در بخش مسئولیت آنتن اسکن می کند و اشعه های باقی مانده HN همراه است اهداف شناسایی شده شناسایی شده است.
مطالعات GAK ادعا شده در ادبیات ثبت اختراع و علمی و فنی نشان داد که مجموعه ای از ویژگی های تازه معرفی شده از آنتن های دستگاه HL و پیوندهای جدید همراه با بقیه عناصر و اتصالات پیچیده به طبقه بندی خود نمی پردازند . در عین حال، نباید به صراحت از هنر پیشین باشد. بنابراین، گاز پیشنهادی باید رضایت بخش "نوآوری" را رضایت بخشد و سطح نوآوری را داشته باشد.
این اختراع توسط نقاشی نشان داده شده است، که در آن شکل 1 نمودار ساختاری گاز پیشنهادی را ارائه می دهد.
این مجموعه شامل مسیرهای اصلی و اضافی SP، دستگاه HL، مسیر OGS، دستگاه ارتباطات و شناسایی، مسیر MI، CSS و Sorg و کل تایر است.
مسیر اصلی SP حاوی آنتن دریافت کننده اصلی بینی 1 و دستگاه پیش پردازش 2، به طور پیوسته متصل به آنتن 1. دستگاه 2 در یک کپسول هرمی در داخل آنتن 1 قرار داده شده است (ترکیب آنتن 1 با دستگاه 2 نشان داده شده است شکل 1 فلش نقطه ای). آنتن 1 و دستگاه 2 چند کاناله هستند و شامل کانال های N × M هستند، جایی که N مقدار XN (کانال های فضایی) در هواپیما افقی است، M مقدار XN (کانال های فضایی) در سطح عمودی است. از طریق کل اتوبوس 3 مجتمع، دستگاه SP اصلی 2 با CVS 4 و Sorg 5 همراه است.
دستگاه اضافی (کم فرکانس) SP شامل GPB 6، از طریق کابل کابل کابل 7 و یک دستگاه جمع کننده فعلی (در شکل 1 نشان داده نمی شود) به دستگاه پیش درمان 8 متصل است. از طریق کل اتوبوس 3 مجتمع، دستگاه 8 از مسیر SPP اضافی با CVS 4 و Sorg 5 همراه است.
دستگاه HL حاوی یک آنتن 9، دو آنتن رادیویی 10 و 11 و دستگاه ژنراتور 12 است. آنتن 9 در حصار برش 13 و آنتن 10 و 11 - در هر دو طرف زیردریایی قرار می گیرد. آنتن های 9، 10 و 11 به صورت الکترونیکی قابل کنترل هستند. ورودی های سیگنال آنها به طور مستقیم به خروجی های مربوطه دستگاه 12 و کنترل ورودی ها - از طریق کل اتوبوس 3 از مجموعه با CVS 4، و همچنین ورودی کنترل دستگاه 12 متصل می شوند.
مسیر OGS شامل آنتن های 14، 15، 16 و یک دستگاه پیش پردازش 17 است. آنتن 14 دارای یک XN چندگانه است و در قسمت بینی حصار برش قرار دارد. Antenna 15 در بخش خوراک حصار برش قرار دارد و Omnidirectional و فرکانس بالا است. آنتن 16 پهنای باند است و بلوک های آن 16.1، 16.2، 16.3 و 16.4 در گیره بینی 18، در طرف و بخش خوراک حصار حصار 13 قرار می گیرند. خروجی آنتن های 14، 15 و 16 به طور مستقیم متصل می شوند به ورودی های مربوط به دستگاه 17 متصل شده توسط خروجی آن از طریق کل تایر از 3 مجتمع با CVS 4 و Sorcha 5.
مسیر ارتباطی و شناسایی حاوی آنتن رادیویی بینی 19، خوراک آنتن 20 و دستگاه ژنراتور 21 است. ورودی کنترل ژنراتور 21 از طریق کل اتوبوس 3 از این مجموعه به CVS 4 متصل می شود و خروجی های اول و دوم به طور مستقیم با آنتن ها و 20 ورودی به ترتیب هستند.
این دستگاه شامل یک آنتن دریافت کننده دریافت کننده 22، دستگاه ژنراتور 23، سوئیچ دریافتی (نمایش داده نمی شود) و دستگاه پیش پردازش 24. آنتن 22 در پریزنی بینی قرار می گیرد 18 و پیکربندی شده برای چرخش HN در هواپیما عمودی، خروجی ورودی آن از طریق سوئیچ پذیرش به خروجی دستگاه 23 و ورودی دستگاه 24 متصل می شود. ورودی کنترل از دستگاه 23 و خروجی دستگاه 24 از طریق کل تایر 3 مجتمع متصل به CVS 4 و Sorg 5.
علاوه بر کل تایر، 3 مجتمع بین CVS 4 و Sorud 5 دارای تعدادی از اتصالات مستقیم است.
CCS 4 ترکیبی از پردازنده های جهانی و پردازنده های ویژه است و دارای ساختار کامپیوتر کنترل است.
مرتب سازی بر اساس دو کنسول، که هر کدام دارای دو صفحه نمایش در ترکیب آن، کنترل (صفحه کلید، دکمه ها، سوکت ها) است. ساختار کنسول ها شبیه ساختار یک کامپیوتر شخصی است. دستگاه های محیطی معمولی به پورت کنسول ها متصل می شوند: تلفن، بلندگو، چاپگر، ضبط، ضبط کننده مغناطیسی و نوری.
کار گاز پیشنهادی به شرح زیر انجام می شود.
آنتن های دریافت کننده 1، 6، 14، 15 و 16 تغییر نوسانات الکتریکی (آکوستیک) را به مکانیکی انجام می دهند. آنتن 22 برگشت پذیر است.
در دستگاه HL، پذیرش اکو توسط آنتن 1. در مسیر ارتباطی و شناسایی سیگنال های ارتباطی و سیگنال های اکو نیز آنتن 1 را انجام می دهد.
در دستگاه های ژنراتور 12، 21 و 23، یک سیگنال پالس از قدرت مورد نیاز برای تقویت و تابش بعدی به عنوان یک سیگنال صدایی با آنتن های 9، 10 و 11 از مسیر دست، آنتن 19 و 20 مسیر ارتباطی و شناسایی تشکیل شده است و آنتن 23 دستگاه. سیگنال های کنترل از پارامترهای سیگنال های تولید شده برای مرتب سازی 5 و CCS 4 تشکیل شده است.
دستگاه های 2، 8، 17 و 24 قبل از پردازش، پیش پردازش سیگنال های دریافت شده را دریافت می کنند، یعنی تقویت، فیلتر کردن، پردازش زمان فرکانس، فرکانس زمان فرکانس و تبدیل از دیدگاه آنالوگ در دیجیتال.
CCS 4 و Sorg 5 سیستم های درگیر تمام مسیرهای HAC هستند. آنها با داده های دیجیتال کار می کنند. اساس کار این سیستم ها الگوریتم های پردازش اطلاعاتی است که توسط نرم افزار اجرا می شود. این بودجه انجام می شود:
شکل گیری کامل پارامترهای سیگنال پالس، که پس از آن در دستگاه های ژنراتور تشکیل شده و توسط قدرت تقویت می شود؛
تشکیل HN از آنتن های کنترل شده از دستگاه HL، با توجه به نیاز به اسکن اشعه خود را؛
پردازش ثانویه اطلاعاتی که ساختار سیگنال خوب را تشخیص می دهد؛
تصمیم گیری در مورد تشخیص هدف؛
هدف پشتیبانی خودکار.
عملیات گاز توسط اپراتورها که پشت کنسول ها قرار می گیرند مدیریت می شود. مرتب سازی بر اساس 5. حالت اصلی عملیات پذیرش، با اصلی و اضافی SP، OGS، ارتباطات است. مسیرهای HL و MI، و همچنین حالت "کار فعال" مسیر ارتباطی، بر روی تابش دستورات از Sorpp گنجانده شده است. 5. کانال های دریافت کننده به طور همزمان و مستقل از یکدیگر عمل می کنند. سیگنال های دریافت شده از طریق آنتن های 1، 14، 15، 16، 6 دستگاه های 2، 8، 17، 24 را وارد کنید، بر اساس محدوده فرکانس، پردازش زمان فرکانس آنها انجام می شود. علاوه بر این، سیگنال های دریافت شده و پردازش شده در کل اتوبوس 3 در CCC 4 ثبت نام می شوند، جایی که نرم افزار بر اساس الگوریتم های گرفته شده در الگوریتم های گاز، پردازش سیگنال ثانویه را تولید می کند. عناصر جنبش و مختصات اهداف تعیین می شود، داده های به دست آمده از همان هدف از مسیرهای مختلف به دست آمده است. اپراتور بر تخصیص اهداف پشتیبانی خودکار تصمیم می گیرد و دستور مناسب را انتقال می دهد.
اگر فرمان اپراتور مناسب از Sorud 5 در گنجاندن حالت های اصلی فعال وجود داشته باشد، این فرمان وارد CSW 4 می شود و پردازش می شود. یک فرمان جامع حاوی کدهای پارامترهای حالت تابش در CVS 4 تولید می شود. با توجه به کل تایر 3، این فرمان به دستگاه ژنراتور 12 (21، 23) منتقل می شود، جایی که تشکیل یک سیگنال پالس قدرتمند از تابش عرضه شده به آنتن 9، 10، 11 (19، 20.22) تولید می شود.
در طول عملیات گوشی در حالت فعال، به علت کنترل الکترونیکی آنتن ها در هر یک از آنتن های 9، 10 و 11، یکی از اشعه های HN آن دارای عرض کافی برای گرفتن اطمینان از هدف برای اسکورت است ، و گوشه ای را در بخش مشخص شده از کار این آنتن اسکن می کند. در مورد حضور در این بخش، دومی توسط پرتو اسکن شناسایی می شود و برای حمایت از آن منتقل می شود. در عین حال، اسکن از پرتو "جستجو" قطع نشده است، اما یک پرتو HN اضافی تشکیل شده است، به سمت هدف جدید کشف شده گرا. این ری با هدف جدید کشف شده همراه است. عرض آن بستگی به محدوده به هدف، اندازه و سرعت حرکت آن در جهت عمود بر جهت "زیردریایی - هدف" است. این عرض عملا تعریف شده است. این باید حداقل ممکن باشد، اما کافی برای همراهی با اعتماد به نفس هدف است. با ظهور هر هدف جدید در جهت جدید، فرایند توصیف شده تکرار می شود و یکی دیگر از HN از آنتن تشکیل شده است، که در حفظ این هدف تاسیس شده است. این فرآیند تکرار خواهد شد تا زمانی که تمام اهدافی که در زمینه مسئولیت آنتن هستند، با اشعه های مربوط به آنتن HN همراه نخواهد بود.
بنابراین، در طول عملیات مسیر دست، تابش سیگنال پروب توسط چندین پرتو باریک انجام می شود (تعداد اشعه ها در هر واحد بیش از تعداد اهداف، و اگر اهداف در یک جهت باشد، حتی کمتر است) . این پیچیده پیشنهاد شده به طور قابل توجهی از نمونه اولیه متفاوت است، که در آن کنترل آنتن های دستگاه گوارش. در خط دستی نمونه اولیه، عرض HN هر یک از آنتن ها باید حداقل عرض بخش مسئولیت آنتن باشد، در غیر این صورت از لحاظ این بخش، هدف را نمی توان در همه موارد شناسایی کرد.
در نمونه اولیه در حالت HL، تابش سیگنال پروب به طور مداوم در سراسر بخش مسئولیت آنتن انجام می شود، بنابراین این تابش را می توان از هر جهت تشخیص داد. در GAK پیشنهادی در بیشتر بخش بخش اکتشافی، تابش با وقفه های بزرگ از دست رفته یا انجام می شود. این به طور قابل توجهی احتمال تشخیص تابش را کاهش می دهد و مختصات منبع آن را هنگام استفاده از گاز پیشنهادی نسبت به نمونه اولیه تعیین می کند.
علاوه بر این، پرتو "جستجو" در گاز پیشنهادی دارای JN نسبتا باریک است، که به شما اجازه می دهد تا تمام انرژی دستگاه ژنراتور را در بخش باریک تمرکز کنید، که هدف آن یک هدف قابل اندازه گیری است که معادل افزایش آن است قدرت هدف سیگنال در مقایسه با نمونه اولیه، جایی که عرض آنتن بزرگ است و اکثر انرژی منتشر شده توسط هدف مورد استفاده قرار می گیرد.
افزایش قدرت هدف سیگنال منجر به افزایش دامنه تشخیص آن می شود.
بنابراین، شکاف پیشنهادی، افزایش امنیت پیچیده و محدوده تشخیص هدف را در حالت دودکش در مقایسه با نمونه اولیه فراهم می کند.
گاز اختراع بسیار آسان است. آنتن های دستگاه GL را می توان با توجه به توصیه های داده شده در کتاب اجرا کرد [L.K. سامویلوف کنترل الکترونیکی ویژگی های جهت گیری آنتن ها. - l: کشتی سازی - 1987]. دستگاه های باقی مانده را می توان به عنوان دستگاه های نمونه اولیه متناظر انجام داد.
مجتمع آبیاری زیردریایی حاوی مسیر بی سر و صدا اصلی، مسیر بی سر و صدا اضافی، مسیر تشخیص سیگنال های هیدروکلتیک، مسیر هیدرولیکوسی، تراکتور و شناسایی، مسیر وزارتخانه و تشخیص موانع ناوبری، سیستم محاسبات مرکزی، صفحه نمایش، ثبت نام، مستند سازی و سیستم کنترل، و کل تایر، در این مورد، تجهیزات سیستم نمایش، ثبت نام، مستندات و کنترل از حذف دو دقيقه با دستگاه های جانبی متصل شده ساخته شده و متصل شده است به سیستم محاسبات مرکزی، مسیر تشخیص اصلی سر و صدا حاوی آنتن دریافت اصلی بینی است که پیکربندی شده برای تشکیل ویژگی های تمرکز استاتیک در هواپیماهای افقی و عمودی، و اولین دستگاه پیش پردازش در کپسول داخل آنتن قرار داده شده و به طور مستقیم به آن متصل شده است خروجی آنتن و خروجی - از طریق کل تایر با مرکز سیستم کامپیوتری آلن و سیستم نمایش، ثبت نام، مستند سازی و کنترل، مسیر تشخیص سیگنال های هیدرو سیاتیک شامل اولین آنتن قرار داده شده در قسمت بینی حصار برش و داشتن یک ویژگی چند مرحله ای جهت گیری، آنتن دوم قرار داده شده است در بخش خوراک حصار برش و یک آنتن سوم فرکانس بالا و Omnidirectional، آنتن سوم است که بلوک های آن در مختصات بینی قرار می گیرند، در بخش خوراک حصار برش و در طرف زیردریایی، که پهنای باند است و دومین دستگاه پیش پردازش، ورودی های سیگنال که به طور مستقیم به خروجی های آنتن های مربوطه از مسیر تشخیص سیگنال های هیدروکوستیک و ورودی کنترل و خروجی متصل می شوند، از طریق کل تایر با سیستم محاسبات مرکزی متصل می شوند سیستم صفحه نمایش، ثبت نام، مستند سازی و سیستم کنترل، مسیر هیدرولیکی حاوی آنتن برده بینی است که در قسمت بینی از حصار برش، دو حمل و نقل داخلی قرار می گیرد آنتن ها بر روی هر دو تخته زیردریایی قرار داده شده و دستگاه ژنراتور اول، خروجی هایی که به ورودی های سیگنال آنتن های رادیویی مربوطه از مسیر هیدرولیکوپیک متصل می شوند و ورودی کنترل - از طریق کل اتوبوس با سیستم محاسبات مرکزی متصل می شوند سیستم نمایش، ثبت نام، مستند سازی و مدیریت، مسیر ارتباطی و شناسایی شامل یک آنتن رادیویی بینی بینی قرار داده شده در یک هماهنگ کننده بینی، یک آنتن رادیویی خوراک، قرار داده شده در حصار برش، و دستگاه ژنراتور دوم، خروجی های آن است متصل به ورودی های سیگنال آنتن های منتشر شده از آنتن های منتشر شده از مسیر ارتباطی و شناسایی، و ورودی کنترل - از طریق یک تایر کل با سیستم محاسبات مرکزی و سیستم نمایش، ثبت، مستند سازی و مدیریت، مسیر وزارتخانه و تشخیص موانع ناوبری حاوی آنتن گیرنده گیرنده است که با امکان چرخش ویژگی های جهت گیری در هواپیما عمودی ساخته شده و در مناظر بینی، ژنراتور سوم قرار دارد باز کردن دستگاه، خروجی که به خروجی ورودی آنتن مسیر مینیستند و تشخیص موانع ناوبری از طریق سوئیچ "دریافت - انتقال، و ورودی کنترل - از طریق کل اتوبوس با سیستم محاسبات مرکزی متصل می شود و سیستم نمایش، ثبت نام، مستند سازی، اسناد و کنترل، و سومین پردازش دستگاه اولیه، ورودی که به طور مستقیم به خروجی آنتن فرستنده متصل است، و خروجی از طریق یک اتوبوس کل با یک سیستم محاسبات مرکزی و سیستم نمایش داده می شود ، ثبت نام، مستند سازی و کنترل، مسیر تشخیص نویز اضافی شامل یک آنتن انعطاف پذیر انعطاف پذیر از طریق کابل کابل و دستگاه جمع کننده فعلی متصل به ورودی چهارم پیش پردازش پیش پردازش شده توسط خروجی آن از طریق یک تایر کل با یک تایر کل سیستم محاسبات مرکزی و سیستم نمایش، ثبت نام، مستندات و کنترل، مشخص شده است که تمام آنتن های تابش از مسیر هیدرولیکی ساخته شده است سازمان های غیردولتی هر دو را با تعداد ویژگی های اشعه ای از ویژگی های جهت گیری و عرض و جهت آنها کنترل می کنند، در حالی که ورودی های کنترل این آنتن ها از طریق اتوبوس کل به سیستم محاسبات مرکزی متصل می شوند و سیستم نمایش، ثبت، مستندات و کنترل، شماره را کنترل می کنند از اشعه های مرجع ویژگی های مرجع هر یک از آنتن های هر واحد بیش از تعداد همراه با این اهداف آنتن، و عرض آنها حداقل ممکن است، اما کافی برای ضبط اعتماد به نفس و همراهی هدف، در حالی که یکی از اشعه های جهت گیری خصوصیات دارای عرض کافی برای گرفتن هدف اسکورت است و زاویه را در بخش مسئولیت آنتن مشخص شده اسکن می کند و اشعه های باقی مانده از ویژگی های جهت گیری آنتن با این هدف آنتن همراه است.
اختراعات مشابه:
این اختراع مربوط به ایستگاه های غذایی آشامیدنی (مجتمع های تولید صدا) است و می تواند برای تعیین حذف منبع صدا (از) از یک مکان آکوستیک، زاویه تولید صدا و مختصات توپوگرافی (TC) از این استفاده شود.
دستگاه برای تشخیص سیگنال ها و تعیین جهت به منبع آنها. نتیجه فنی این اختراع، ایجاد یک دستگاه جدید برای تشخیص سیگنال ها و تعیین جهت به منبع (منابع) با تعداد عملیات غیر خطی در مسیر پردازش، برابر با 2 است.
این اختراع مربوط به زمینه هیدروسیت ها است. Entity: در روش تعیین جهت به فانوس های هیدروسیتتیک، متهم تحت شرایط انتشار چندپارچگی سیگنال ناوبری، جهت به طور همزمان در هواپیماهای افقی و عمودی به پاسخ دهنده نشت هیدروکوستیک با دریافت آرایه آنتن Beacon، تقویت سیگنال دریافت شده توسط پیش تقویت کننده های متصل به خروجی هر یک از شبکه های آنتن مبدل، دیجیتالی سازی با فرکانس FS نمونه گیری.
این اختراع مربوط به تکنیک های تست است و می تواند در آزمایش های ذاتی اشیاء زیر آب استفاده شود. نتیجه فنی کاهش خطا در تعیین مختصات موقعیت و زاویه های جهت گیری شیء موقعیت در فضای چند ضلعی تلفن همراه است.
این اختراع مربوط به زمینه هیدروسیت ها است و می تواند در هیدرولیسیت های منفعل، و همچنین در آکوستیک اتمسفر و رادار منفعل استفاده شود. نتیجه فنی به دست آمده این است که اطمینان حاصل شود که مشاهده بصری منابع تابش بر روی صفحه نمایش نشانگر، محل آنها به طور مستقیم در مختصات مورد نظر از میدان مشاهدات "جهت دامنه" با تعیین مختصات آنها بر روی مقیاس های میدان شاخص در حداکثر ایمنی نویز، قابل دستیابی در این سیستم دریافتی و افزایش پردازش و افزایش محاسبات، هزینه ها را افزایش می دهد.
استفاده: در رادار، ارتباطات رادیویی و نجوم رادیویی. Entity: آشکارساز همبستگی سیگنال ها شامل یک آرایه پراکندگی خاص (هدیه) ساخته شده به روش خاصی است که شامل N از مبدل های الکترومغناطیسی فعال فعال فعال و غیر فعال است که مربوط به آنها کانال های انتقال کانال، کنترل مشخصه تابش است واحد، واحد محاسبه عناصر مختصات نسبی هدیه، آستانه، محلول ماشین حساب آستانه، شاخص، عناصر فعال-منفعل هدیه، و همچنین ویژگی های بازیگر همبستگی با یک تاخیر زمانی از سیگنال ها.
این اختراع مربوط به زمینه هیدروسیت ها است و می تواند برای شناسایی جسم در محیط دریایی و اندازه گیری مختصات استفاده شود. نتیجه فنی از استفاده از اختراع، اندازه گیری فاصله به شیء انعکاس در زمان ناشناخته اشعه و محل تولید است که باعث افزایش کارایی استفاده از مواد هیدرو سیاتیک می شود. برای رسیدن به این نتیجه فنی، یک سیگنال انفجاری در محیط دریایی تابش می شود، سیگنال منعکس شده توسط گیرنده پهنای باند، تجزیه و تحلیل فرکانس چند کاناله از سیگنال منعکس شده، نقشه برداری بر روی نشانگر Spectra از خروجی کانال، نصب یک نصب مستقل و تضعیف می کند منبع سیگنال انفجاری، اندازه گیری وابستگی سرعت صدا از عمق را اندازه گیری می کند، سطح تداخل را در نوار پذیرش اندازه گیری می کند، با آستانه تشخیص تعیین می شود، یک سیگنال انتشار سیگنال پرینتر را دریافت می کند که بیش از آستانه تشخیص انتخاب شده است، تعیین می کند زمان پذیرش سیگنال انتشار رو به جلو از منبع انفجاری به گیرنده TPRAM، طیف سیگنال انتشار رو به جلو را اندازه گیری می کند که بیش از آستانه تشخیص قرار گرفته است، میزان انتشار سیگنال سیگنال را در نوار دستگاه دریافتی تعیین می کند، سیگنال، منعکس شده از هدف، تعیین زمان دریافت سیگنال بازتاب یافته TAHO، اندازه گیری طیف سیگنال منعکس، تعیین نوار جمع و جور طیفی سیگنال منعکس شده از آستانه بیش از حد از آستانه تشخیص فخ، فاصله را با فرمول Dism \u003d K (FPRAM-FAC) تعیین می کند، جایی که K ضرایب کاهش فرکانس طیف سیگنال در طول توزیع، با disp\u003e (techo- TPRIM) با، جایی که - سرعت صدا. 1 IL
این اختراع مربوط به زمینه هیدروکوستیک است و می تواند برای ساخت سیستم ها برای تشخیص سیگنال های صدایی هیدرولیت ها نصب شده بر روی یک حامل متحرک استفاده شود. نتیجه فنی از استفاده از اختراع این است که اطمینان از امکان تعیین تغییر در زاویه نرخ حرکت منبع سیگنال پروب، تغییرات سرعت در جهت حرکت آن را تضمین کند. برای رسیدن به نتیجه فنی مشخص شده، پذیرش پیوسته سیگنال های پروب از منبع متحرک انتخاب شده است، تعیین زمان ورود اولین سیگنال سنجش دریافت شده، مشخص شده در آن عملیات جدید معرفی شده است، یعنی: لحظات زمان TI دریافت n یکی دیگر از سیگنال پروب، که در آن n کمتر نیست 3، تعیین فاصله زمانی TK بین لحظات ورود به هر دو پس از هر یک از دیگر سیگنال های پروب TK \u003d Ti + 1-Ti، تعیین تفاوت بین اندازه گیری شده فواصل زمانی ΔTM \u003d TK + 1-TK، جایی که M تعداد اندازه گیری فواصل زمانی متوالی است، تعیین تفاوت در فواصل زمانی، به یاد داشته باشید اولین تفاوت فاصله زمانی، تعیین تفاوت فاصله زمانی بعد، اگر تفاوت فاصله زمانی یک نشانه منفی است ، کوزین زاویه حرکت دوره منبع را تعیین کنید، به عنوان نسبت هر تفاوت بعدی تا تفاوت فاصله زمانی اول، تعیین دوره کارشناسی منبع منبع سیگنال های صدایی، به عنوان ارزش، معکوس معکوس از رابطه اندازه گیری شده، اگر مقدار اندازه گیری شده از تفاوت مثبت است، پس منبع سیگنال های پروب حذف شده است، و کوزینو زاویه محاسبه شده است نسبت اولین تفاوت به هر یک از پس از آن. 1 Z.P. F-les، 1 yl.
این اختراع مربوط به زمینه هیدروکوستیک است و می تواند در وظایف تعیین کلاس شی در هنگام توسعه سیستم های هیدروکوستیک مورد استفاده قرار گیرد. طبقه بندی سیگنال های هیدروکلتیک انتشار سر و صدا از شیء دریایی پیشنهاد شده است، که شامل سیگنال آنتن دریافتی از انتشار سر و صدا از شیء دریایی در مخلوط افزودنی با تداخل آنتن هیدروکلتیک، تبدیل سیگنال به یک نمایش دیجیتال، پردازش طیفی از سیگنال های دریافت شده، انباشت طیف به دست آمد، طیف به دست آمده، طیف طیف را با فرکانس، تعیین آستانه تشخیص بر اساس احتمال آلارم کاذب احتمالی و زمانی که آستانه تشخیص طیف فعلی در این فرکانس تصمیم گیری در حضور یک جزء گسسته بیش از حد است، با توجه به اینکه شیء دریایی طبقه بندی شده است، که در آن سیگنال های شیء دریایی در مخلوط افزودنی با تداخل، دو نیمه چسب آنتن هیدروکلتیک گرفته می شود، پردازش طیفی سیگنال های دریافت شده در SEITSES SEMI تولید می شود -Tentene طیف های قدرت در خروجی های دو نیمه دوم خلاصه می شوند، تعیین کل طیف قدرت S σ 2 (ω k)، تفاوت S δ 2 (ω k) طیف های قدرت را در خروجی دو نیمه پین \u200b\u200bپیدا می کنند ، تفاوت تعیین شده S 2 (ω k) σ - δ ¯ \u003d s σ 2 (ω k) ¯ - s Δ 2 (ω k) ¯ - s Δ 2 (ω k) ¯ - طیف قدرت انتشار نویز از شیء دریایی و حضور اجزای گسسته توسط انتشار نویز آستانه تشخیص فرکانس از شیء دریایی مورد قضاوت قرار می گیرد. این تضمین می کند که از بین بردن اثر طیف تداخل گرفته شده توسط میدان جانبی مشخص شده از جهت آنتن هیدروکلتیک و تعریف صحیح علائم طیفی طبقه بندی. 1 IL
این اختراع مربوط به رادار، به ویژه برای دستگاه ها برای تعیین مختصات اشیاء انتشار سیگنال های صوتی، با کمک سنسورهای فیبر نوری از لحاظ جغرافیایی - متر فشار صدا. نتیجه فنی افزایش دقت تعیین محل و شناخت نوع شی با برآورد ترکیب طیفی از سر و صدا صوتی و پارامترهای حرکت آن است. نتیجه فنی با معرفی یک حلقه دوم برای انتقال پالس های نوری از طول موج دیگر و یک زنجیره ترتیبی از گره ها: (2n + 3) راهنمای نور، FPU سوم، ژنراتور پالس دوم، دوم منبع تابش نوری، به دست می آید 2n + 4) فیبر. 1 IL
این اختراع مربوط به زمینه هیدروسیتوستیک است و در نظر گرفته شده برای تعیین پارامترهای نویز اشیاء در دریا است. بررسی سیگنال هیدروکلتیک سر و صدا از شیء دریایی، مقایسه آن با یک سیگنال پیش بینی شده، به صورت پویا برای ترکیبی از سر و صدای ادعایی از شی و فاصله به جسم با تعیین ضریب همبستگی شکل گرفته است. در حداکثر، عملکرد وابستگی ضریب همبستگی بر روی سر و صدای مورد نظر جسم و فاصله تخمین زده شده به شی به طور مشترک ارزیابی سر و صدا از جسم را تعیین می کند و فاصله را به جسم تخمین می زند. نتیجه فنی این اختراع، افزایش دقت برآورد صدای شی با کاهش همزمان در کل تعداد عملیات ریاضی در طول ارزیابی سر و صدا شی و فاصله تا جسم است. 2 IL
این اختراع مربوط به تاخیر های صوتی (AP)، مکان های آکوستیک (AL) است و می تواند برای تعیین بلبرینگ منبع صدا (از) استفاده شود. هدف از این اختراع، افزایش دقت جهت پیدا کردن از سطوح زمین تمایل به هواپیما افق، جایی که آنتن آکوستیک واقع شده است و زمان را برای تعریف تحمل این منبع کاهش می دهد. Belayer از B. این روش تعیین به شرح زیر است: اندازه گیری دمای هوا، سرعت باد، زاویه جهت جهت آن در لایه سطحی جو و معرفی آنها به دستگاه محاسبات الکترونیکی، که در امتداد نقشه توپوگرافی مشخص شده است. توجه ویژه (گودال)، جایی که موقعیت های آتشبندی توپخانه و ملات را می توان قرار داد، یک منطقه مسطح تقریبا یک شکل مستطیلی را با طول حداقل سه صد متر و عرض حداقل ده متر انتخاب کنید که تقریبا عمود بر آن است جهت در مرکز تقریبی گودال، زاویه گرایش این زمین های بازی را به هواپیما افق اندازه گیری می کند و با توجه به این زاویه، با استفاده از یک دستگاه مکانیکی نوری و راه آهن RangeFinder، SP را در یک خاص قرار می دهد راه را بر روی زمین، پذیرش سیگنال های صوتی و تداخل، تبدیل آنها به سیگنال های الکتریکی و تداخل، پردازش شده در 1 و 2 کانال پردازش سیگنال های AP یا AL، که در خروجی این کانال ها تعیین شده است، ولتاژ ثابت U1 و U2، که تنها از آن گرفته شده است گودال، از ولتاژ U1 ولتاژ U2، ولتاژ را کاهش می دهد، این ولتاژ را کاهش می دهد، تفاوت تفاوت به مجموع آنها و به طور خودکار بر اساس برنامه به دست می آید، بلبرینگ واقعی منبع صدا α محاسبه می شود. 8 یل
این اختراع مربوط به زمینه هیدروسیتاتیک است و می تواند در توسعه سیستم های تعیین مختصات با توجه به مسیر کاهش نویز مجتمع های هیدروکلتیک مورد استفاده قرار گیرد. این روش شامل دریافت یک سیگنال نویز هیدروکلتیک از آنتن هیدرو اکوستیک، حفظ هدف در حالت بی صدا، تجزیه و تحلیل طیفی سیگنال نویز هیدروکوستیک در یک باند فرکانس گسترده ای، تعیین فاصله تا هدف، پذیرش سیگنال نویز هیدروکوستونی تولید می شود با نیمی از آنتن هیدروکلتیک، طیف متقابل بین سیگنال های نویز هیدروکلتیک را که نیمی از آنتن های هیدروکلتیک را مصرف می کنند، اندازه گیری می کنند؛ اندازه گیری عملکرد خودکار از این طیف متقابل (ACF) را اندازه گیری کنید؛ فرکانس حامل تابع عملکردهای اتوکراتیک اندازه گیری می شود، تفاوت بین فرکانس حامل اندازه گیری شده و فرکانس حامل مرجع سیگنال انتشار نویز هدف از Fetalone اندازه گیری شده در فاصله پایین (FISM FISM) و فاصله تا هدف تعیین شده توسط فرمول D \u003d (Fitalon-Fism) K، جایی که K ضریب تناسب است که به عنوان نسبت تغییرات در فرکانس حامل تابع عملکرد خودکار عملکرد در هر واحد در هنگام تعیین فرکانس مرجع محاسبه می شود. 1 IL
اختراعات مربوط به زمینه هیدروسیتوستیک هستند و می توانند برای کنترل سطح انتشار سر و صدا از شیء زیر آب در اختراع مخزن استفاده شوند. نتیجه فنی به دست آمده از معرفی اختراعات، دستیابی به امکان اندازه گیری سطح سر و صدا شناور آب زیر آب به طور مستقیم از خود فسیبی است. این نتیجه فنی به دست آمده از این واقعیت است که ماژول (ها)، مجهز به هیدروفون، افزایش ماژول اندازه گیری (IM)، و سطح انتشار نویز با استفاده از آن اندازه گیری می شود. این سیستم مجهز به سیستم برای بررسی عملکرد آن بدون از بین بردن دستگاه است. 2n و 11 Z.P. F-LS، 3 YL.
دستگاه (100) برای رفع ابهام از برآورد (105) DOA (φ ^ AMP) حاوی آنالایزر (110) DOA تخمین زده شده برای تجزیه و تحلیل تخمین (105) DOA (φ ^ AMP) برای به دست آوردن مجموعه (115) از پارامترهای تجزیه و تحلیل مبهم (φ ~ i ... φ ~ n؛ f (φ ~ i) ... f (φ ~ n)؛ fenh، i (φ ^ amb) ... fenh، n (φ ^ amb)؛ GP (φ ~ i). ..gp (φ ~ n)؛ d (φ ~ i) ... d (φ ~ n)) با استفاده از اطلاعات (101) جابجایی، و اطلاعات (101) از جابجایی نسبت (φ ^ ↔↔↔) بین آواره (φ ^) و برآورد ناخواسته DOA (φ) و بلوک (120) مجوز ابهام برای حل ابهام در مجموعه (115) پارامترهای تجزیه و تحلیل مبهم ( φ ~ من ... φ ~ n؛ f (φ ~ i) ... f (φ ~ n)؛ فنان، من (φ ^ amb) ... fenh، n (φ ^ amb)؛ gp (φ ~ i) ... gp (φ ~ n)؛ d (φ ~ i) .. .d (φ ~ n)) برای به دست آوردن یک پارامتر مجاز مجاز (φ ~ res؛ fres، 125). 3n و 12 zp f-li، 22 yl.
این اختراع مربوط به زمینه هیدروسیتاتیک است و می تواند به عنوان یک جنگنده هیدرواستاتیک زیردریایی های مقاصد مختلف، و همچنین در طول آثار زمین شناسی و هیدروسیتاتیک زیر آب و تحقیقات مورد استفاده قرار گیرد. این مجتمع شامل مسیرهای کاهش سر و صدای اصلی و اضافی، مسیر تشخیص سیگنال هیدروکلتیک، مسیر هیدرولیکوسی، مسیر ارتباطی و مسیر شناسایی، مسیر وزارتخانه و تشخیص موانع ناوبری، سیستم محاسباتی مرکزی، سیستم نمایش، ثبت نام، مستندات و کنترل و کل تایر. در این مورد، تمام آنتن های رادیویی از مسیر هیدرولیکی به صورت الکترونیکی توسط تعداد پرتوهای ویژگی های جهت گیری و عرض و جهت آنها کنترل می شوند. مسیر اصلی حذف سر و صدا شامل اصلی آنتن دریافت کننده بینی و اولین دستگاه پیش پردازش است. مسیر تشخیص سیگنال های هیدروکلتیک شامل سه آنتن دریافت کننده و دومین دستگاه پیش پردازش است. مسیر هیدرولیک شامل سه آنتن الکترونیکی کنترل شده و دستگاه ژنراتور اول است. مسیر ارتباطی و شناسایی شامل دو آنتن رادیویی و دستگاه ژنراتور دوم است. Ministand Ministand و تعهد تعهدات توسعه آنتن ها را ساخت، انتقال انتقال، گروه تولید و تشنگی از پیش پردازش دستگاه. این دستگاه کاهش نویز اضافی شامل یک آنتن انبساط انعطاف پذیر، کابل کابل، یک دستگاه جمع کننده فعلی و یک دستگاه پیش پردازش چهارم است. نتیجه فنی: بهبود بهره برداری از عملیات گاز و دامنه تشخیص اهداف در حالت GL. 1 IL
فصل 1. تجزیه و تحلیل روش های اصلی برای تعیین محل منبع سیگنال های ناوبری با دانه های فوق العاده موضوع.
1.1. تنظیم مشکل توسعه یک مجموعه ناوبری آبی.
1.1.1 تجربه IPMT در توسعه سیستم های ناوبری Rangefinder.
1.1.2 وظایف توسعه هانس-یچ.
1.2 روش های دامنه برای تعیین اطلاعات روشنایی با آنتن های کوچک (فوق العاده پیشنهاد شده).
1.2.1 آنتن یکسان خطی.
1.2.2 آنتن معادل دایره ای.
1.2.3. پتانسیل دقیق با دقت در دامنه Dailers.
1.3. در اندازه گیری تغییر فاز دو سیگنال تونال Mesvd، نویز تحریف شده.
1.4 پیش بینی شده پیش بینی شده جهت یافتن فرمول در سیستم های با آنتن های پیکربندی ساده.
1.4.1 گیرنده عنصر خلیج
1.4.2 گیرنده چهار عنصر
1.4.3. تاخیر فاز شش کانال.
1.5. روش تخلیه منبع سیگنال های ناوبری با استفاده از آنتن های گسسته دایره ای با تعداد زیادی از موارد.
1.5.1. خروجی فرمول های تخمینی و ارزیابی خطا از UB-Delayer با پایه دایره ای.
1.5.2. الگوریتم های جهت پیدا کردن برای یاب جهت با پایه دایره ای، با توجه به تغییرات در جهت آنتن زاویه.
1.6 نتیجه گیری
فصل 2. پردازش آماری اطلاعات سیستم ناوبری هیدرو سیاتیک با پایه فوق العاده.
2.1. حل وظیفه خرده فروشی بر اساس روش های پردازش آماری.
2.2. معادلات استخراج شده برای آنتن های چند عنصر از پیکربندی های مختلف.
2.2.1 آنتن چند عنصر خطی.
2.2.2 آنتن با تعداد دلخواه عناصر در یک پایگاه داده دایره ای.
2.2.3. آنتن چهار عنصر.
2.2.4 آنتن دایره ای با یک عنصر اضافی در مرکز.
2.2.5. آنتن دو کابین.
2.2.6 نتیجه گیری
2.3. ویژگی های پردازش بسیاری از سیگنال ناوبری فرکانس.
2.4 پیکربندی آنتن و ارزیابی دقت بالقوه.
2.4.1 آنتن ها با فاصله نیمه موج بین عناصر.
2.4.2 آنتن های بازنویسی
2.4.3. بخش بازبینی را بر اساس فاز آنتن انتخاب کنید.
2.5. نتیجه گیری
فصل 3. روش شناسی برای ارزیابی صحت سیستم های ناوبری با پایه فوق العاده پیچ.
3.1 ارزیابی جزء سیستماتیک خطای تعریف بلبرینگ.
3.1.1. عملکرد فاز یک آنتن دریافتی چند عنصری ناقص.
3.1.2. توسعه تجهیزات برای صدور گواهینامه مترولوژیکی از دریافت آنتن های چند عنصر.
3.1.3. مطالعات تجربی از دقت آنتن ها در شرایط آزمایشگاهی.
3.2. برآوردهای دقت یاب پهن باند (مطالعه ویژگی های آنتن برای پردازش یک سیگنال ناوبری چند فرکانس).
3.3. مطالعات تجربی از ویژگی های اصلی سیستم ناوبری فوق العاده مدار در شرایط یک دریای کوچک.
3.3.1 روش صدور گواهینامه سیستم با مقایسه با داده های سیستم ناوبری گواهی شده (بر روی مثال Hans-DB).
3.3.2. روش ها برای ارزیابی دقت اندازه گیری های زاویه ای با داده های Rangefinder.
3.3.3. روش فارغ التحصیلی سیستم ناوبری فوق العاده ولتاژ در شرایط کامل با استفاده از چراغ مرجع.
3.3.4 منطق مترولوژی برای فارغ التحصیلی سیستم ناوبری فوق العاده ولتاژ بر اساس هانس DB و GPS.
3.4. ارزیابی ویژگی های مترولوژی HANS-UBB زیر دریای عمیق.
3.5. نتیجه گیری
فصل 4. روش های ساخت و توسعه عناصر اصلی سیستم ارتباطی هیدرواستاتیک دستگاه زیر آب. 146 4.1. رویکرد کلی به ارزیابی پارامترهای اصلی GASS برای ANCA.
4.1.1 عمومی.
4.1.2 در ساختار نماد اطلاعات.
4.1.3. درباره هماهنگ سازی
4.1.4 در انتخاب پالس برای ارزیابی ویژگی های کانال ارتباطی.
4.1.5. پردازش بلوک داده ها
4.1.6. مدل سازی عددی کانال ارتباطی. 153 4.2.0 توسعه پیزوپراپرترهای پهن باند و آنتن برای گاس.
4.2.1 روشهای پیزو استوانه پهن باند.
4.2.2. پیزوپورتر های استوانه ای با ویژگی های قابل کنترل
4.2.3. پهنای باند پیستون نوع پیزو.
4.2.4 در مورد تطبیق الکتریکی پیزوپراپرترها در یک باند فرکانس گسترده ای.
4.2.5. در بهره وری انرژی مبدل های باند پهن.
4.2.6 ویژگی های آنتن های توسعه یافته.
4.3. گیرنده چند عنصر سیگنال های گاس با کنترل انطباقی HN با توجه به جهت یاب سیستم ناوبری.
4.3.1. پردازش داده ها.
4.3.2. ویژگی های آنتن UBB هنگام دریافت سیگنال های سیستم ارتباطی.
4.4. مطالعه تجربی سیستم ارتباطی چند فرکانس غیر انحصاری با اصلاح دامنه نسبت دنده کانال.
4.4.1 الگوریتم برای پردازش سیگنال چند فرکانس.
4.4.2. طرح ساختاری سیستم های ارتباطی
4.4.3. مطالعات تجربی از عناصر سیستم ارتباطی هیدرواستاتیک در شرایط یک دریای کوچک.
4.5. نتیجه گیری
فصل 5. توسعه تاخیر داپلر به عنوان بخشی از سیستم ناوبری Onboard از دستگاه زیر آب.
5.1. آنتن ها
5.2. پردازش طیفی سیگنال های پالس کوتاه.
5.3. ساختار و مدار.
5.4. مطالعات خارجی از ویژگی های تاخیر به عنوان بخشی از ANCA.
5.5. نتیجه گیری
فصل 6. پیاده سازی فنی و تجربه کاربرد کاربردی کاربرد ابزار هیدروکلتیک برای هدایت روبات زیر آب. 207 6.1 پیاده سازی فنی سیستم ناوبری هیدرواستاتیک با پایه فوق العاده پیچ.
6.1.1. طرح ساختاری هانس-UKB.
6.1.2 ویژگی های ساخت سخت افزار.
6.1.3. سیستم ناوبری آنتن پذیر پذیر.
6.1.4 پردازش داده ها.
6.1.5. رابط کاربر
6.1.6. نرم افزار.
6.1.7. آزمونهای خارجی و عملیات عملی HANS-UKB.
6.2. مشخصات فنی کیت تجهیزات گاس.
6.2.1 ویژگی های اصلی.
6.2.2 اصل عملیات
6.2.3. نمودار ساختاری گیرنده.
6.2.4 ساختار سیگنال GASS.
6.2.5. نتایج آزمایشات دریایی در دریای عمیق.
6.3. مجتمع ناوبری هیدروکلتیک.
6.3.1. ترکیب و هدف مجموعه ناوبری کشتی.
6.3.2. پیشنهادات فنی برای توسعه یک سیستم ناوبری و مدیریت ترکیبی.
6.4. تست های پیچیده ناوبری هیدرواستاتیک و تجربه در استفاده از آنها در طول کار واقعی.
6.4.1 تست های ناوبری پیچیده
6.4.2. تجربه کاربرد عملی ابزارهای ناوبری هیدروکلتیک در موتورهای جستجو واقعی.
لیست توصیه شده از پایان نامه ها
توسعه روش ها و الگوریتم ها برای ناوبری یک طرفه زیردریایی های غیر مسکونی مستقل 2013، کاندیدای علوم فنی Dubrovin، Fedor Sergeevich
روش ها برای پردازش سیگنال های هیدروکلتیک دریافت شده در منطقه Fresnel دریافت و سیستم های انتشار 2010، دکتر علوم فنی Kolmogorov، ولادیمیر Stepanovich
زیر آب و ناوبری با استفاده از میدان الکترومغناطیسی 2006، دکتر علوم فنی Shibkov، Anatoly Nikolaevich
روش ها و سیستم ها برای بهبود ایمنی قایقرانی بر اساس دستگاه های ناوبری هیدروکلتیک با پایه خطی گیرنده های جهت دار 2006، دکتر علوم فنی Zavyalov، ویکتور ولنتینویچ
ناوبری دستگاه زیر آب خودمختار با کمک یک سیستم ناوبری inererial inerial 2017، نامزد علوم فیزیکی و ریاضی Filatova، Gusel Amirovna
پایان نامه های مشابه کار می کند در تخصص "آکوستیک"، 01.04.06 CIFRA VAC
توسعه روش افزایش دقت موقعیت اشیاء زیر آب 2013، نامزد سرپرستی علوم فنی، الکساندر الکساندروویچ
روش پارامتری از تحول کنترل شده از حوزه های هیدرو سیاتیک از انتشار نویز و عروق ماهیگیری، روش ها و سیستم های اندازه گیری آنها بر اساس الگوهای آکوستیک غیر خطی 2002، نامزد علوم فنی Khaliulov، Fargat Amershanovich
توسعه الگوریتم های پردازش اطلاعات در سیستم های چند عنوان با استفاده از تجزیه و تحلیل طیفی سریع سیگنال ها 2005، نامزد علوم فنی Davletkaliyev، رومی Kuanishevich
روش ها و ابزار پشتیبانی ناوبری هواپیما و کنترل ترافیک هوایی بر اساس فن آوری های ماهواره ای 2004، دکتر علوم فنی Sleupchenko، پیتر Mikhailovich
تئوری و روش های طراحی سیستم های آنتن فوق العاده پهنای باند برای نصب و راه اندازی مجدد رادیو و موبایل 2011، دکتر علوم فنی Rebovsky، یوری Anatolyevich
نتیجه گیری از پایان نامه در موضوع "آکوستیک"، Matvienko، یوری Viktorovich
نتایج اصلی:
1. اصول ساخت سیستم های فوق العاده نقطه ای مورد بررسی قرار گرفت و تجزیه و تحلیل روش های اساسی برای تعیین موقعیت زاویه ای منبع سیگنال های ناوبری تونال و پهن باند در طی پردازش اطلاعات آنتن های دریافتی کوچک مورد بررسی قرار گرفت.
عبارات تخمینی به دست آمد و ویژگی های پیدا کردن ویژگی های تاخیرهای دامنه با پردازش داده های کل و تفاوت ها مورد بررسی قرار گرفت.
دقت کم پتانسیل ساده ترین سیستم های پیکربندی حاوی یک، دو یا سه جفت گیرنده های متعامد با روش های پردازش داده فاز و نیاز به عوارض سیستم برای افزایش دقت مشخص شده است.
یک روش برای پیدا کردن منبع سیگنال های تونال بر اساس استفاده از آنتن ها با تعداد زیادی از گیرنده ها به شدت بر پایه دایره ای قرار داده شده با تعریف فاز تجمعی نیز پیشنهاد می شود که خطای آن به طور بالقوه به 0.1gradus کاهش می یابد.
فرمول های محاسبه شده و در مثال آنتن های دایره ای با تعداد زیادی از موارد، ارتباط داده های سنسور دوره، رول و دیفرانسیل و خطاهای آنها بر ارزش پارامترهای ناوبری اندازه گیری شده و خطاهای آنها نشان داده شده است.
بر اساس حداکثر روش درست، وظیفه پردازش آماری داده های ناوبری در هنگام استفاده از آنتن های گسسته پیکربندی دلخواه حل شد. در این مورد، ارزیابی پارامترهای مورد نظر با پردازش مشترک تمام جفت کانال های گرفته شده با مقیاس های مختلف تعیین می شود. ضرایب وزن شامل یک جزء هندسی، برابر مشتق عملکرد فاز با توجه به پارامتر اندازه گیری شده و انرژی برابر با سیگنال سیگنال به عمل در کانال است.
روابط برآورد شده برای تعریف تحمل و خطای محرک برای تعدادی از رایج ترین پیکربندی های آنتن مشتق شده است: خطی، دایره ای، ترکیب شده است.
Finder Direction Face براساس استفاده از آنتن های دایره ای از یک اندازه موج بزرگ با تعداد محدودی از عناصر توسعه داده شد.
تکنولوژی کاهش تعداد کانال های پردازش با حفظ رزولوشن زاویه ای با جدا کردن روش فروشگاهی به دو مرحله اثبات شده است: جهت گیری درشت به منظور تعیین بخش مشاهده و حل دقیق معادله تحمل در یک تقریب اولیه داده شده اثبات شده است.
امکان اجازه ابهامات فاز ناشی از استفاده از آنتن های اسپری توسط روش های یافتن جهت دامنه، توجیه شد.
به لحاظ تئوری، دستاورد رزولوشن زاویه ای 0.1-0.2 درجه با تعداد کانال های 6-8 و اندازه موج آنتن 3-5 از طول موج فرکانس ناوبری را اثبات کرد.
روابط برای محاسبه بلبرینگ یک آنتن گسسته کوچک، زمان انتشار سیگنال صوتی بر روی دیافراگم آن قابل مقایسه با فرکانس متوسط \u200b\u200bطیف دریافت شده است.
2. روش های تحقیق برای ارزیابی صحت دقت Hans UKB و روش های توسعه یافته برای اندازه گیری ویژگی های آنها در شرایط آزمایشگاهی و ابزار.
برای توصیف یک آنتن چند عنصر گسسته، یک تابع بردار پیشنهاد شد، هر جزء آن عنصر اختصاصی وابستگی آنتن فاز سیگنال صوتی را از جهت ورود آن توصیف می کند. تعریف دقیق (تجربی) عملکرد، زمانی که حل وظیفه به تأخیر انداختن شیء ناوبری اجباری است اجباری است.
پایه ای برای صدور گواهینامه آنتن های چند عنصر، که در یک حوضه هیدروکلتیک تخصصی نصب شده است و شامل یک منبع سیگنال های قابل تنظیم و یک سیستم دریافتی با یک پلت فرم دوار دقیق و تجهیزات اندازه گیری فاز چند کاناله برای سیگنال های پالس رادیویی است.
تکنولوژی صدور گواهینامه آنتن توسعه یافته است، که شامل اندازه گیری عملکرد فاز آنتن، تعیین توابع تحلیلی است که تقریبا داده های به دست آمده و استفاده از آنها را در حل معادلات پیدا کردن جهت، با جدول بندی تفاوت منشا بلبرینگ و ارزش واقعی (نصب) آن به صورت ارزیابی جزء سیستماتیک خطا است.
چند عنصر دریافت کننده آنتن برای نمونه های فعال سیستم ها توسعه یافته و مورد بررسی قرار می گیرند، که ارزش یک خطای سیستماتیک حدود 0.5 Aradus را فراهم می کند.
تجزیه و تحلیل تطبیقی \u200b\u200bکار هانس DB و UBB در شرایط یک دریا کوچک با نصب ثابت از آنتن دریافت ACB انجام می شود.
این روش را برای برآورد اندازه گیری های زاویه نسبی بر اساس پردازش داده های سنجش سنجی تجزیه و تحلیل کرد.
روش صدور گواهینامه سیستم UCB در دریای کوچک با استفاده از چراغ مرجع بر اساس پردازش داده های Rangefinder اثبات شده است. نشان داده شده است که با خطای نسبی اندازه گیری محدوده، چند دهم درصد، یک خطا از مقدار طراحی تحمل آنا، که باعث حرکت در اطراف UKB - آنتن و فانوس دریایی در یک مسیر بسته، از یک درجه تجاوز نمی کند .
تجزیه و تحلیل انجام شد و ویژگی های دقت سیستم UCB بر اساس نتایج کار در شرایط دریای عمیق تعیین شد. به عنوان داده های مرجع، داده های DB Hans مورد استفاده قرار گرفت، سیستم ناوبری Onboard و سنسور عمق، داده های Rangefinder. امکان سنجی تجزیه و تحلیل تغییرات دیفرانسیل داده های سنجشگر برای شناسایی قطعات فردی از مسیر حرکت ANPA و امکان میانگین معقول بودن داده های زاویه ای با پردازش مسیر نشان داده شده است. به عنوان یک نتیجه از تجزیه و تحلیل، نتیجه گیری در مورد خطای اندازه گیری زاویه ای حدود 0.5 موجه است.
تکنیک از بین بردن ابهامات فاز ناشی از افزایش اندازه پایه اندازه گیری، اثبات شده و آزمایش شده توسط پردازش آماری سیگنال های چند فرکانس مورد آزمایش قرار گرفته است.
آنتن چند عنصر دریافت کننده و تجهیزات رادیویی (پذیرش) سیگنال های پیچیده توسعه یافته و آزمایشگاهی مورد بررسی قرار گرفت، برآوردهای خطای سیستم ساخته شد که ده ها تاند را تشکیل می دهند.
3. روش ها مورد بررسی قرار می گیرند و به معنای یک سیستم انتقال اطلاعات با سرعت بالا برای کانال هیدروکوستیک از هیئت مدیره ANCPA به کشتی ارائه می شود.
مطالعات ساخت پیزو-مبدل های پهنای باند توسعه یافته و مبدل های تخصصی استوانه ای و میله های تخصصی با ویژگی های جهت گیری ویژه طراحی شده برای کار در تجهیزات سیستم ارتباطی توسعه داده شد: یک مبدل استوانه ای بسیار کارآمد با پهنای باند به سه اکتاو با استفاده از لایه های تطبیق نازک شاخ پیشنهاد شد پیکربندی، که مطابق با الزامات کار در یک دریا کوچک است؛ انواع مبدل رزونانس برای تابش و پذیرش سیگنال های چند فرکانس، ساخته شده به شکل مجموعه ای از پیزوسیلین های کواکسیال پیشنهاد شده است؛ پیستون Piezoproverters با یک نوع HN یک طرفه برای کار در یک کانال پخش سیگنال عمودی پیشنهاد شده است.
ساختار سیستم انتقال داده برای کانال چند منظوره ارتباطات را با سازگاری مدار پردازش از طریق بلوک داده از طول نهایی تجزیه و تحلیل کرد. انتقال بلوک اطلاعاتی پیش از این روش برای تنظیم تنظیمات گیرنده پیش می رود، اندازه بلوک موقت توسط وضعیت فعلی کانال ارتباطی تعیین می شود. روش های مدل سازی عددی، ویژگی های انتخاب سیگنال های متصل را تجزیه و تحلیل کرده و نشان دهنده کاهش استفاده از سیگنال به دستکاری فاز و فرکانس ترکیبی است.
روش شناسی برای برآورد ویژگی های پالس کانال ارتباطی و پالایش لحظه ای هماهنگ سازی با انتقال و پردازش یک سری پالس های فاز متناوب پیشنهاد شده است.
طرح دریافت سیستم سیگنالینگ سیستم ارتباطی یک آنتن ناوبری چند عنصر با اجرای فیلتر فضایی پیشنهاد شده است اشعه مستقیم در شرایط توزیع چندگانه بر اساس داده های مربوط به موقعیت زاویه ای منبع سیگنال ها و تداخل، در طول کار هانس UKB به دست آمده است.
مطالعات انجام شده است و امکان انتقال اطلاعات را در یک کانال ارتباطی چند فرکانس با هماهنگی اولیه از پاسخ فرکانس دامنه کانال کانال و انتخاب پیام فعلی بر اساس تجزیه و تحلیل تطبیقی \u200b\u200bانرژی در هر کانال فرکانس، توجیه کرده است. مطالعات تجربی از چنین سیستم پردازش در یک دریای بسیار کوچک امکان استفاده از تجهیزات برای انتقال را تایید کرد تصاویر گرافیک با سرعت حدود 3000 بیتی / ثانیه با احتمال کم خطاها.
4. برای ناوبری Oneboard، ربات زیر آب طراحی شده و به تاخیر داپلر پیچیده طراحی شده است.
مطالعات انجام شده و توسعه آنتن های تخصصی تخصصی با حساسیت اکو بالا به دست آمده به دست آمده به دست آمده به دست آمده از هماهنگی مکانیکی آکوستیک بهینه از روش های پیزو آنتن با محیط کاری.
برای افزایش سرعت تاخیر، یک روش پردازش طیفی سیگنال های پالس کوتاه پیشنهاد شده و اجرا می شود، با توجه به تشکیل پیاده سازی های شبه منسجم طولانی از سیگنال های منعکس شده، رزولوشن بالا را ارائه می دهد. این روش به شما اجازه می دهد تا اجزای سرعت را با حداقل پراکندگی در یک ثانیه تعیین کنید.
طراحی شده و استفاده شده به عنوان بخشی از Doppler نمونه آزمایشی نمونه ANPA
تکنیک فارغ التحصیلی تاخیر در شرایط کامل در شرایط کامل با محاسبه سرعت ANPA در محدوده یافته های مربوط به هانس توسعه داده شد.
5. طراحی شده، آزمایش شده و آزمایش شده در عملیات واقعی یک مجتمع ناوبری آبی، که باعث ایجاد یک تصویر اطلاعات ناوبری از جنبش ماموریت بر روی ارائه کشتی و ANCA، متشکل از ابزارهای ناوبری هیدرو سیاتیک، انتقال اطلاعات و اندازه گیری مطلق، سرعت.
طراحی شده، آزمایش شده در یک دریای کوچک و عمیق و یکپارچه به مجتمع ناوبری هانس UKB، که شامل: یک منبع هماهنگ از سیگنال ناوبری در تسهیلات، یک مجتمع پردازش کشتی با یک آنتن دریافت شده بر روی کابل کابل، گیرنده GPS. سیستم دارای ویژگی های زیر است: محدوده - 6-10 کیلومتر؛ خطا اندازه گیری تحمل کمتر از 1 درجه است؛ خطای اندازه گیری محدود 0.5٪ است. به طور آزمایشی امکان استفاده از سیستم را در موقعیت موقعیت ANCA تایید کرد، که انتقال طولانی را در امتداد شیء طولانی با حرکت کشتی ارائه می دهد و آنتن دریافت کننده را با سرعت 5 گره دریافت می کند.
طراحی شده، تست شده و مورد استفاده به عنوان بخشی از یک دستگاه پنهان یک سیستم فرکانس بالا از ناوبری UKB با قرار دادن منبع در هیئت مدیره کشتی، و گیرنده در دستگاه.
طراحی و آزمایش شده در ترکیب ابزار هیدرواستاتیک ناوبری و پشتیبانی اطلاعات، تجهیزات انتقال تجهیزات APA برای کنترل عملیاتی وضعیت نظارت و جستجوی کار در شرایط دریای عمیق و کانال ارتباطی عمودی. این تجهیزات انتقال داده ها را با سرعت 4000bit / s فراهم می کند، با احتمال خطا در حدود یک درصد، که انتقال فریم های تصویر را برای 45C تضمین می کند.
طراحی شده، آزمایش شده و یکپارچه به سیستم ناوبری Onboard Doppler Lag، ارائه اندازه گیری سرعت مطلق ANCA در محدوده سرعت 0-2m / s با خطای 1-2 سانتی متر / ثانیه.
تکنولوژی استفاده از مجتمع ناوبری پیشنهاد شده است:
هانس DB - برای چندین اجرا از ANCA در مناطق اختصاص داده شده با جستجو در مناطق با افزایش الزامات برای دقت.
هانس UKB اگر هنگام ورود به سیستم های پیشرفته یا اهداف متحرک، در موارد اضطراری از ANCA، در مورد راه اندازی های مخفیانه، دیگر انتقال وجود نداشته باشد.<
با محاسبه مسیرها بر روی تعداد - هنگامی که ANCA در یک نقطه مشخص منتشر می شود، هنگام اضافه کردن به استفاده از سیستم های تلویزیونی.
کار موفقیت آمیز این مجموعه در ترکیب ANC در هنگام اجرای موتورهای جستجو واقعی در اقیانوس نشان نمی دهد.
حق شناسی.
در نتیجه، من می خواهم قدردانی عمیق را به تمام کارکنان IPMT، که در توسعه و آزمایش سیستم های هیدروکوستاتیک وسایل نقلیه زیر آب شرکت کرده اند، بیان کنید. با تشکر از Academician Ageev M.D.، سر منطقه Kaskin، B. A. و Rylov N.I.
نتیجه
مراجع تحقیقات پایان نامه دکتر علوم فنی Matvienko، یوری Viktorovich، 2004
1. Ageev M.d. وسیله نقلیه بدون سرنشین مستقل مدولار 1.TP. - MTS مجله، 1996، جلد. 30، 1، ص. 13-20.
2. وسایل نقلیه زیر آب غیرقابل انطباق مستقل. تحت ژنرال اد. ACAD. Ageeva M، د - Vladivostok، Dalnawka، 2000، 272C.
4. R.Babb. ناوبری AUV برای نظرسنجی های علمی زیر آب. فن آوری دریایی، 1990، دسامبر، p.25-32.
6. J. Romeo، G. Lester. ناوبری کلیدی برای ماموریت های AUV است. فناوری دریایی، 2001، دسامبر، p.24-29.
7. Borodin V.I.، Smirnov G.E.، Tollova H.A.، Yakovlev G.V. ابزار ناوبری هیدروکلتیک. L.، Shipbuilding، 1983، 262C.
8. Miln P.h. سیستم های موقعیت یابی هیدروکلتیک. L.، Shipbuilding، 1989،316C.
9. Gestone J.A.، Cyr R.J.، Roesler G :، جورج E.S. تحولات اخیر در ناوبری زیر آب آکوستیک. مجله ناوبری، 1977، V.30، 2، p.246-280.
10. Boldrev B.C. روش های دقیق تعاریف مختصات در طول کار هیدروفیزیک در دریای آزاد. کشتی سازی در خارج از کشور، 1980. №2. C.29-42.
11. Kyslov A. F.، Postnikov I.V. ویژگی های دقت سیستم های ناوبری Beacon با یک پایگاه آکوستیک طولانی. tez Dokl 2 اتحادیه همه conf تحقیق و توسعه اقیانوس، L.، 1978. SME.2، P.95-96.
12. Kasatkin B.A.، Kobidze V.V. ویژگی های ناوبری هیدرواستاتیک در منطقه قفسه. در شنبه دستگاه های زیر آب و سیستم های آنها، از DFHA، Vladivostok، 1977، از 84-88.
13. Kasatkin B.A.، Kobidze V.V. سیستم ناوبری همزمان Hydrocoustic ثبت اختراع G01S 9/60، № 713278، 1978.
14. Smirnov G.E.، Tollova N.A. سیستم های ناوبری با چراغ های هیدروکلتیک. کشتی سازی در خارج از کشور. 1980، №9، p.45-54.
15. K. Vestgard، R. Hansen، V. Jalving و H.pedersen. بررسی Hugin 3000 AUV -Design و نتایج زمینه .- مداخله زیر آب 2001 /.
16. T. Martin و G. زائر. چالش های بررسی در موقعیت USBL آکوستیک عمیق آب آشامیدنی وسایل نقلیه زیرزمینی یا کمربند. .- / مداخله زیر آب 2001 /.
17. Hubert توماس، اریک پتی. از وسایل نقلیه زیرزمینی مستقل (AUV) برای نظارت بر وسایل زیر آب تحت نظارت (SUV). اقیانوس ها 97.
18. Paramonov A.A.، Klyuev M.C.، Storozhev P.P. برخی از اصول برای ساخت سیستم های ناوبری آبی با پایگاه داده طولانی. vii interddes مدرسه علمی conf "روش های مدرن و روش های مطالعات اقیانوسی"، Moscow، 2001، p.244-245.
19. Paramonov A.A.، Afanasyev v.N. سیستم ناوبری هانس-متر هیدروکلتیک. vi یک روز مدرسه علمی conf "روش های مدرن و ابزار تحقیقات اقیانوسی"، Moscow، 2000، ص. 100-112.
20. Ageev MD، Blidberg D.R.، Kiselev Ji.B.، Rylov N.I.، Shcherbatyuk A.F. دولت و چشم انداز توسعه رباتیک زیر آب. فن آوری های دریایی، Vladivostok، Dalnalock، 2001، ISK.4، ص .6-23.
21. Ageev MD، Casatkin B.A.، Kiselev L.V.، Molokov Yu.G.، Nikiforov V.V.، Rylebov N.I. وسایل نقلیه اتوماتیک زیر آب. L.، Shipbuilding، 1981.248 p.
22. J. Manley. وسایل نقلیه زیرزمینی مستقل برای اکتشاف اقیانوس. 0CEANS-2003، ص .327-331.
23. Kobidze v.V. سرعت انتشار سیگنال های هیدروکلتیک در محدوده محدوده. Preprint، Vladivostok، که فدرالدار آکادمی علوم اتحاد جماهیر شوروی، 1979، 37C.
24. Kobidze v.V. مطالعه دقت حوزه هیدروکلتیک. - نویسنده پایان نامه KF-M.N. Vladivostok، که DVTC از آکادمی علوم اتحاد جماهیر شوروی، 1981، 26C.
25. Xavier Lurton، نیکلاس W. Millard. امکان سنجی موقعیت مکانی صوتی پایه VAIY-Long Sistem برای AUV. ادامه Ocean-94، Brest-France، 1994، Vol.3، PP. 403-408.
26. Kasatkin B.A.، Kosarv G.V. ویژگی توسعه APS برای محدوده بسیار طولانی AUV. دادرسی Ocean-95، San-Diego، اکتبر 1995، V. من، ص 175-177.
27. Kasatkin B.A. سیستم بلندمدت Hydroacoustic همزمان ثبت اختراع G01S 15/08، № 2084923، 1995.
28. موقعیت آکوستیک. www. mors.fr.product.
29. سنسور ناوبری محدوده و بلبرینگ ترکیبی. مدل NS-031. -www. sonatech.com.Product.
30. Kasatkin B.A. سیستم ناوبری همزمان Hydrocoustic ثبت اختراع G01S 15/08، № 2084924، 1995.
31. D. Thomson، S. Elson. سیستم های موقعیت یابی آکوستیک نسل جدید. 0CEANS-2002، p.1312-1318.
32. فرستنده عمومی قابل برنامه ریزی و Super Sub-Mini Transponder / Responder، انواع 7971/7977 / 7978،7970 / 7973 www.sonardyne.co.uk
33. B. منسون. موقعیت گسترده ای با دقت LM. سیستم های اقیانوس اطلس، دشت 2001، ص. 15-19.
34. Kasatkin B.A.، Kosarv G.V. پایه های فیزیکی محفظه صوتی. بولتن DVO R و 1998، № 3.c.41-50.
35. Kobidze v.V. مدل های خطاهای و الگوریتم ها برای پردازش اطلاعات محدوده ای در سیستم های ناوبری هیدروکلتیک. Predprint، Vladivostok، که DVTC از آکادمی علوم اتحاد جماهیر شوروی، 1979، 42C.
36. Kasatkin B.A. ویژگی های غیرمستقیم میدان صدا در اقیانوس لایه ای. Dokl آکادمی علوم اتحاد جماهیر شوروی، 1986، 291، №6، ص. 1483-1487.
37. M.DeffEnbaugh، J.G. Bellingham، N. Schmidt. رابطه بین موقعیت کروی و هیپربولیک. ادامه Ocean-96،
38. Kasatkin B.A.، Kosarv G.V. تجزیه و تحلیل دقت اندازه گیری مختصات Beacon- پاسخ دهندگان سیستم ناوبری هیدرو سیاتیک. فن آوری های دریایی، شماره 1. Vladivostok، Dalnaka، 1996، P.60-68.
39. Kasatkin B.A.، Kosarv G.V. استفاده از روش عبور برای تعیین مختصات مطلق چراغ های پاسخ دهنده. فن آوری دریایی، vol.2. Vladivostok، Dalnaka، 1998، ص .65-69.
40. J. Opderbecke. کالیبراسیون در دریا یک سیستم پوزیتینگ خودرو زیرزمینی USBL. -Oceans "2000.
41. Posidonia 6000. سیستم موقعیت یابی Acoistic زیر آب. www.ixsea-ceano.com.
42. خبرنامه. Kongsberg Simrad. شماره 2-2000 شماره www.kongsberg-simrad.com.
43. K. Vestgard، R. Hansen، B.Jalving، O.A. pedersen نظرسنجی Hugin 3000 AUV. رفع و نتایج زمینه. 0Ceans "2001.
44. سیستم ردیابی کم هزینه LXT. www.ore.com.
45. توماس سی. آستین، راجر استووی، C. Von Alt، R. Arthur، R. Goldborough. موش ها، یک سیستم ردیابی صوتی نسبی برای اقیانوس عمیق اقیانوس توسعه یافته است - اقیانوس ها "97.
46. \u200b\u200bتوماس سی. آستین، راجر استوویسی. ردیابی آکوستیک نسبی- فناوری دریایی، 1998، مارس، ص 81-27.
47. M. Watson، C. Loggins و Y.T. ochi یک سیستم فوق العاده کوتاه فوق العاده کوتاه خط (SSBL). فن آوری زیر آب، 1998، p.210-215، توکیو، ژاپن.
48. جیمز E. Deveau. سیستم های موقعیت یابی آکوستیک زیر آب. Oceans-95، Vol.1، p. 167-174، سن دیگو، ایالات متحده آمریکا.
49. Nautronix. موقعیت دقیق ATS www.nautronix.com
50. یین دونگمی، آهنگ Xinjian، Feng Haihong. تکنولوژی کلیدی برای پیاده سازی سیستم ردیابی و سیستم موقعیت یابی زیر آب. -The 3-D کارگاه بین المللی Harbin، China، 2002، P.65.
51. یین Dongmei، Song Xinjian، Feng Haihong. طراحی یک سیستم مثبت آکوستیک آکوستیک زیر آب. کارگاه بین المللی 3-D Harbin، China، 2002، P.43.
52. Komulakov B.A. سیستم های هیدروکلتیک با چراغ ها توسط پاسخ دهندگان برای ردیابی مجتمع های زیرزمینی زیرزمینی. - Shipbuilding، 1997، شماره 6، p.39-45.
53. Paramonov A.A.، Nosov A.V.، Kuznetsov V.N.، Dreuchsev S.A.، Klyuev M.S.، من I
54. Storozhev P.P. در بهبود دقت سیستم ناوبری هیدروکلتیک با پایه اصلی هسته ای. VII International تایید می کند به گفته اقیانوس شناسی، M.، 2001، P.80-81.
55. Bogorodsky A.V.، Koryakin Yu.A.، Ostrukhov A.A.، Fomin Yu.P. تکنیک توسعه فن آوری هیدرواستاتیک و تکنیک توسعه اقیانوس. VII International تایید می کند اقیانوس شناسی، M.، 2001، p.266-269.
56. Zlobina N.V.، Kamenev S.I.، Kasatkin B.A. تجزیه و تحلیل خطا سیستم ناوبری هیدرو سیاتیک با پایه فوق العاده پیچ. در شنبه روبات های زیر آب و سیستم های آنها. شماره 5،1992، Vladivostok، IPMT DVO RAS، p.116-123.
57. Kasatkin B.A.، Kulinchenko S.I.، Matvienko Yu.V.، Nurgaliev R.F. مطالعه ویژگی های یاب جهت فاز برای UBB-Hans.- در SAT. روبات های زیر آب و سیستم های آنها. vish.6،1995، vladivostok، dalnawka، p.75-83.
58. Kasatkin B.A. ارزیابی خطا از UB-Delayer با پایه دایره ای. در شنبه فن آوری دریایی جلد 1،1996، Vladivostok، Dalnawka، ص .69-73.
59. Kasatkin B.A.، Matvienko Y.V. روش تعیین بلبرینگ بر روی منبع تابش و دستگاه برای اجرای آن. RF ثبت اختراع شماره 2158430، BUL. iSoble33، 2000
60. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. ، Nurgaliyev R.F.، Rylov R.N. سیستم ناوبری هیدروکلتیک با پایه فوق العاده. فن آوری های دریایی، Vladivostok، Dalnalock، 2000، تخلیه، S. 102-113.
61. Matvienko Yu.V. پردازش داده ها در یک یاب جهت UB بر اساس یک آنتن چند عنصر ناقص. viii interddes مدرسه علمی conf "روش های مدرن و ابزار تحقیقات اقیانوسی" مسکو، 2003، بخش 1، ص 44-25.
62. جان G. Proakis. ارتباطات دیجیتال انتشارات صنعت الکترونیک، چین، پکن، 2000، 928p.
63. M.Stojanovic. پیشرفت های اخیر در ارتباطات آکوستیک با سرعت بالا. IEEE Journal Oceanic Engineering، Vol.2 L، No.2، 1996، p. 125-136.
64. M.Stojanovic، J.Catipovic، J.Proakis. فاز ارتباطات دیجیتال منسجم برای کانال های حسابداری زیر آب. IEEE Journal Oceanic Engineering، Vol. 19، نه 1، 1994، p.100-111.
65. Stojanovic M.، J.A. Catipovic و J.G. طراح کاهش پیچیدگی فضایی و زمان پردازش سیگنال های ارتباطی آکوستیک زیر آب. J. Acoust. SOC من، 98 (2)، pt.l، آگوست. 1995، ص .961-972.
66. J. Labat. زمان واقعی ارتباطات زیر آب. Ocean-94، Brest، France، Vol.3، P.501-506.
67. A.G. Bessios، F.M. caimi جبران چندگانه برای ارتباطات آکوستیک زیر آب. Ocean-94، Brest، France، Vol.1، P.317-322.
68. Lester R. Liblanc. پردازش Spatio-temporaal از داده های ارتباطی منسجم صوتی در آب کم عمق. IEEE J. اقیانوس. مهندس جلد 2005، شماره 1، ژانویه 2000، ص. 40-51.
69. Lester R. Liblanc. Beamformer تطبیقی \u200b\u200bبرای ارتباطات در آب کم عمق
70. B. Geller، V. Capellano، J.M. برتر، A. Essebar و G. Jourdain. اکولایزر برای انتقال ویدئو در ارتباطات چند منظوره زیر آب. IEEE J. اقیانوس. مهندس Vol.21، No 2، Apr.، 1996، p. 150-155.
71. Billon D.، Quellec B. عملکرد سیستم های ارتباطی آکوستیک صوتی با استفاده از پرتوهای تطبیقی \u200b\u200bو برابر شدن. Ocean-94، Brest، France، Vol.3، P.507-512.
72. R. COATES. ارتباطات آکوستیک زیر آب. فناوری دریایی، 1994، نه. 6، ص. 41-47.
73. A. Zielinski، Young-Hoon Yoon، Lixue Wu. تجزیه و تحلیل عملکرد ارتباطات صوتی دیجیتال در کانال آب کم عمق. IEEE Journal Oceanic Engineering، Vol.20، No.4، 1995، p.293-299.
74. L. Wu و A. Zielinski. رد چندپایی با استفاده از پیوند آکوستیک پرتو باریک. -Oceans-88، بالتیمور، p.287-290.
75. Wang C.h.، Zhu Min، Pan Feng، Zhang X.j.، Zhu W.Q. مودم ارتباطی آکوستیک زیر آب MPSK.
76. سری ATM 870. مودم های تله متری صوتی. کتابچه راهنمای کاربر - Datasonics، FeBry 1999.
77. K. Scussel، J.Rice، S. Merriam. مودم آکوستیک جدید MFSK برای عملیات در کانال های زیر آب زیرزمینی. Oceans-97، هالیفاکس.
78. J. Catipovic، M. Deffenbaugh، L.Freitag، D. Frye. سیستم تله متری آکوستیک برای جمع آوری اطلاعات و کنترل اقیانوس عمیق اقیانوس عمیق. Oceans-89، ص. 887-892.
79. F. Caimi، D. Kocak، G. Ritter، M.Schalz. مقایسه و توسعه الگوریتم های فشرده سازی برای تله متری AUV. پیشرفت های اخیر
80. P.I. پنتین، e.a. tsellev در برخی از تقریبی که در محاسبه کانال های ارتباطی آبی استفاده می شود. تدوین آکوستیک شرقی، جلد. 1، Vladivostok، 1975، ص. 15-18.
81. P.I. پنتین، e.a. Tsellev، A.V. shulgin محاسبه انرژی کانال های ارتباطی هیدرواستاتیک. تدوین آکوستیک شرقی، جلد. 1، Vladivostok، 1975، ص. 19-23.
82. Svverkin E.I. تله متری هیدروکلتیک در اقیانوس شناسی. - L. 1978. 149C، انتشارات خانه LenUniversity.
83. V.P. Kodanev، S.P. piskarev روش ها برای بهینه سازی ویژگی های سیستم انتقال اطلاعات دیجیتال در کانال هیدروکلتیک تحت شرایط پذیرش تک تقلید. مجله آکوستیک، 1996، جلد 42، №4، p.573-576.
84. Yu.V. Zakharov، V.P. کدانف مقاومت سر و صدا از پذیرش انطباقی سیگنال های صوتی پیچیده در حضور بازتاب از مرزهای اقیانوس. مجله صوتی، 1996، دوره 42، №2، p.212-219.
85. Yu.V. Zakharov، V.P. کدانف پذیرش انطباقی سیگنال ها در کانال ارتباطی هیدروکلتیک با توجه به مجله آکوستیک پراکندگی داپلر، 1995، جلد 41، شماره 2، ص 2554-259.
86. Yu.V. Zakharov، V.P. کدانف مطالعات تجربی یک سیستم انتقال اطلاعات آکوستیک با سیگنال های مانند سر و صدا. مجله آکوستیک، 1994، دوره 40، №5، p.799-808.
87. Volkov A.V.، Kuryanov B.F.، Penkin M.m. ارتباطات هیدرواستاتیک دیجیتال برای برنامه های اقیانوسی. VII International تایید می کند اقیانوس شناسی، M.، 2001، p.182-189.
88. L.R. LEBLANC و R.R.J. Beaujean پردازش Spatio-temporaal از داده های ارتباطی منسجم صوتی در آب کم عمق. IEEE Journal Oceanic Engineering، Vol.25، NO. 1، 2000، p.40-51.
89. M. Suzuki، K. Nemoto، T. Tsuchiya، T. Nakarishi. تله متری آکوستیک دیجیتال از اطلاعات ویدئویی رنگی. Oceans-89، ص .893-896.
90. R. ROLLENDS. f.kvinn محدودیت سرعت انتقال اطلاعات در تله متری هیدروکلتیک. - در CN. آکوستیک زیر آب، مسکو، جهان، 1970، ص .478-495.
91. رگه ها A.A. متر سرعت کشتی جی، اشتغال، 1978، 286C.
92. K.V. Jorgenson، B.L. Grose، F.a. crandal سونار داپلر برای ناوبری دقیق نامشخص اعمال می شود. Ocean-93، Vol.2، P.469-474.
93. Kasatkin B.A.، Zlobin H.B.، Kasatkin S.B. تجزیه و تحلیل ویژگی های عامل تشکیل پیزو از آنتن فازی از انقباض داپلر. در شنبه فن آوری دریایی جلد 1،1996، vladivostok، dalnawka، p.74-83.
94. R. Pinkel، M. Merrefield و J. Smith. توسعه اخیر در فن آوری سونار داپلر. . Ocean-93، Vol.1، p.282-286.
95. RDI Workhorse Navigator DVL. www.rdinstruments.com.
96. Demidine B.M.، Zolotarev B.B.، Matvienko Yu.V.، Plotsky V.D.، Servetnikov M.I. سیستم ناوبری هیدروکلتیک. TEZ بنیاد 22 علمی و فناوری. konalnevost. polytech inst. Vladivostok، 1974.
97. Demidin v.M.، Matvienko Yu.V.، Plotsky V.D.، Servertovikov M.I. سیستم ناوبری دستگاه زیر آب "Skat". Tez.Donal 1 All-Union. conf با توجه به مطالعه و توسعه منابع اقیانوس جهان. Vladivostok، 1976.
98. Dorokhin K. A. ارائه داده های سیستم ناوبری هیدروکلتیک. در شنبه روبات های زیر آب و سیستم های آنها. شماره 5،1992، Vladivostok، IPMT DVO RAS، P.94-100.
99. Dorokhin K. A. سخت افزار و نرم افزار بلوک کشتی از سیستم ناوبری هیدرو سیاتیک. در شنبه روبات های زیر آب و سیستم های آنها. شماره 5،1992، Vladivostok، IPMT DVO RAS، ص. 101-109.
100. Dorokhin K.A. کنترل کننده سیستم ناوبری هیدروکلتیک. در شنبه روبات های زیر آب و سیستم های آنها. 1990، Vladivostok، IPMT DVO آکادمی علوم اتحاد جماهیر شوروی، ص. 102108
101. Sosalin Yu.G. پایه های نظری ناوبری رادار و رادیویی. M.، رادیو و ارتباطات، 1992، ص. 134
102. Matvienko Yu.V. در صحت آمار دامنه دامنه. Limit Technologies، Vladivostok، Dalnawka، 2003، شماره 5، p.56-62.
103. Smartyshev MD، Dobrovolsky Yu.Yu. آنتن های هیدروکلتیک. دایرکتوری-جی، Shipbuilding، 1984، p. 171
104. YA.D. شیرین، v.N. Manjo تئوری و تکنیک پردازش اطلاعات رادار در زمینه تداخل. M.، رادیو و ارتباطات، 1981، 416C.
105. J. Bendat، A. Pirsol. تجزیه و تحلیل کاربردی داده های تصادفی. مسکو، میر، 1989، 542C.
106. کنت س. میلر، ماروین م. روچرگر. تخصیص آکویواریانس به برآورد لحظه ای متناقض. IeeTransactions در نظریه اطلاعات، سپتامبر 1972، p.588-596.
107. Weiqing Zhu، Wen Xu، Jianyun Yu. برآورد خطا از برآورد فاز دیفرانسیل ضریب همبستگی پالس آرایه سونار. اقیانوس ها 96.
108. Zhu Weiqing، وانگ Changhong، Pan Feng، Zhu Min، ژانگ Xiangjun. برآورد طیفی در ADSP. اقیانوس ها 97.
109. توسعه دستگاه ها، دستگاه ها و اصول ساخت سیستم های آبیاری از دستگاه های زیر آب. - // گزارش OKR "Mayak-IPMT" //، علمی. دست ها. Matvienko Yu.V. Vladivostok، GFC Ngo Delstandart، 1992، 190s.
110. Matvienko Yu.V.، Rylov R.N.، Rylov N.I. توسعه یک آنتن دریافتی از یک هیدرولتور فاز Baaptic از نمای جانبی. vii interddes مدرسه علمی conf "روش های مدرن و تحقیقات اقیانوس شناسی"، مسکو، 2001، ص.
111. توسعه و ایجاد یک دستگاه زیر آب غیر منتظره مستقل با افزایش فاصله و خودمختاری. // علمی دست ها. Academician Ageev MD، P. هنرمند Matvienko Yu.V.، Vladivostok، IPMT DBO RAS، 2001، No. State Ros. 01.960.010861.
112. گزارش های ویژه ای در مورد OCC "K -1R" // شرکت طراح سازنده Academician Ageev MD، معاون GL. const Matvienko Yu.V. Vladivostok، IPMT DVO RAS، 1998-2003.
113. G. Korn، T. ذرت. راهنمای ریاضیات .- مسکو، علم، 1970s، 720s.
114. Matvienko Yu.V. پردازش آماری اطلاعات سیستم ناوبری آبی با پایه فوق العاده پیچ. در شنبه فن آوری دریایی شماره 2،1998، Vladivostok، Dalnawka، P.70-80.
115. RYLOV N.I. در تعریف پارامترهای ناوبری در هانس UKB با توجه به یک آنتن چند عنصر. در شنبه فن آوری های دریایی، Vladivostok، Dalnawka، 2003، شماره 5، ص .46-55.
116. A. Steele، S. Byrne، J. Riley، M. Swift. مقایسه عملکرد الگوریتم های برآورد با وضوح بالا با استفاده از داده های آزمون های شبیه سازی شده و دریایی. IEEE Journal Oceanic Engineering، Vol.L8، No.4، 1993، P.438-446.
117. P. Kraeuther، J. پرنده. پردازش آرایه های اصلی پردازش برای نقشه برداری صوتی Swath. اقیانوس ها 97.
118. مدارهای مجتمع فوق العاده بالا و پردازش سیگنال مدرن. اد. S. Guna، X. Whitehaus. T. Kailat.، مسکو، رادیو و ارتباطات، 1989، 472C.
119. Marple ML. c.ji. تجزیه و تحلیل طیفی دیجیتال و کاربرد آن. M. World.، 1990، 584C.
120. A. Steele، C.Byrne. پردازش آرایه با وضوح بالا با استفاده از تکنیک های وزن سنجی ضمنی. IEEE Journal Oceanic Engineering، Vol. 15، نه 1، 1990، p.8-13.
121. R. Roy و T. Kailath. Esprit- برآورد پارامترهای سیگنال از طریق تکنیک های رونویسی روتاری. معاملات IEEE در پردازش آکوستیک، گفتار و سیگنال، Vol.37، No.7، 1989، P.984-994.
122. Gao Hogze، Xu Xinsheg. تحقیق بر روی روش تشخیص فاز سیستم Bathymetry چند پرتو. Iwaet-99، Harbin، China، 1999، p. 198-203.
123. Kinkulkin I.E.، Rubtsov v.D.، Fabrik M.A. روش فاز برای تعیین مختصات. M.، 1979، 280s
124. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.i.، Rylov R.N.، یک تاخیری از سیگنال های ناوبری پهن باند. در شنبه فن آوری های دریایی، Vladivostok، Dalnalock، 2000، تخلیه، S. 114-120.
125. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I.، Nurgaliyev R.F.، Rylov R.N.، Kasatkin B.A. Dinaerer سیستم ناوبری هیدروکلتیک با پایه فوق العاده پیچ. RF ثبت اختراع №2179730، BUL. iSoble5، 2002
126. V. داگلاس و R. Pietsch. تکنیک های پرتوهای بهینه برای آرایه های کالیبراسیون ناقص. ادامه Ocean-96،
127. MD Ageev، Ageev، A.A. Boreyko، Yu.V. Vaulin، B.E. Gornak، B.B. Zolotarev، Yu.V. Matvienko، A.F. Shcherbatyuk ارتقاء TSL زیردریایی برای کار در قفسه و در تونل ها. - در شنبه فن آوری های دریایی، Vladivostok، Dalnawka، 2000، تخلیه، p.23-38.
128. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. در انتخاب ساختار و ویژگی های تجهیزات کانال ارتباطی هیدرواستاتیک دستگاه زیر آب. - شنبه فن آوری های دریایی، Vladivostok، Dalnawka، 1996، شماره 1، ص .84-94.
129. Matvienko Yu. V. برآورد پارامترهای اصلی سیستم ارتباطی هیدروکلتیک برای دستگاه زیر آب. در شنبه فن آوری دریایی مرحله 4،2001، Vladivostok، Dalnawka، S.53-64.
130. پیش بینی تحقیق در مورد ایجاد طیف وسیعی از دستگاه های خودمختار مدیریت شده به منظور افزایش کارایی سیستم های نورپردازی زیر آب، ناوبری، ضد زیردریایی و مبارزه ضد معدن
131. نیروی دریایی // گزارش NIR "Centurion-Dvo" //، علمی. دست ها. Academician Ageev MD، P. هنرمند Matvienko Yu.V.، Vladivostok، IPMT DVO RAS، 1996
132. مبانی نظری رادار. اد. v.E. Dulevich.، مسکو، رادیو شوروی، 1978، 608C.
133. Kasatkin B.A.، Matvienko Yu.V. به ارزیابی پهنای باند پیزو های استوانه ای استوانه ای کم فرکانس. مجله آکوستیک، 1983، جلد 29، №1، ص .60-63.
134. Balabaev S.M.، Ivin N.F. مدل سازی کامپیوتری نوسانات و انتشار اندازه های محدود. Vladivostok، Dalnaka، 1996، 214 p.
135. مبدل های پیزوسیک. دایرکتوری اد. Pugacheva S.I. -Leningrad، Shipbuilding، 1984، 256s.
136. Matvienko Yu.V. روش های توسعه و تحقیق برای توصیف و ساخت پیزورهای استوانهای پهنای باند. خلاصه k.f.-m.n. اردک فدرال فدرال آکادمی علوم اتحاد جماهیر شوروی، 1985، 22C.
137. Matvienko Yu.V.، Yermolenko Yu.G.، Kirov I.B. ویژگی های توسعه آنتن های محدوده فرکانس متوسط \u200b\u200bبرای سیستم های هیدروکلتیک دستگاه های عمیق آب. tez Dokl برهم زدن Conf ، ed، tovvmu، vladivostok، 1992، p.78-83.
138. V.A. Kasatkin، Ju.G. لارنوف، Matvienko Y.V.D توسعه آرایه های عمیق آب برای Subbottom Profiler.- روند Oceans-94، Brest-France، 1994.
139. Kasatkin B.A.، Matvienko Yu.V. طیف فرکانس خود را از پیزایروتر استوانه ای. مجله آکوستیک، 1979، جلد 25، شماره 6، ص .932-935.
140. Kasatkin B.A. ، Yermolenko Yu.G.، Matvienko Yu.V. پیزوپورتر چند منظوره برای تحقیقات زیر آب. نشسته روبات های زیر آب و سیستم های آنها، IPMT DVO RAS، IP.5،1992، ص. 133-140. "
141. Ermolenko Yu.G.، Kasatkin B.A.، Matvienko Yu.V. امیتر هیدروکلتیک. ثبت اختراع فدراسیون روسیه № 20022381، 1993.
142. Kasatkin B.A.، Matvienko Yu.V. مبدل الکتریکی -. خودکار svid № 1094159، BUL. ایزولار، №19،1984.
143. Matvienko Yu.V، در مورد اثر ساختار پر شدن داخلی بر ویژگی های عوامل تشکیل دهنده پیزو استوانه ای. در کتاب: استفاده از روش های فیزیکی در تحقیقات و کنترل غیر مخرب، Khabarovsk، 1981، قسمت 2، ص. 125-126.
144. Kasatkin B.A.، Matvienko Yu.V. پیزو تبدیل استوانه ای با معکوس معکوس در کتاب: استفاده از روش های فیزیکی مدرن در تحقیقات و کنترل غیر مخرب، Khabarovsk، 1981، قسمت 2، p.131-132.
145. Kasatkin B.A.، Matvienko Yu.V. اندازه گیری رادیاتور از محدوده صدا فرکانس صدا. ابعاد آکوستیک روش ها و روش ها. جلسه IV انجمن آکوستیک روسیه، Moscow، 1995، P.4.
146. Kasatkin B.A.، Matvienko Yu.V. مبدل الکتریکی استوانه ای استوانه ای. خودکار svid № 10666665، BUL. ترمز، № 12،1984.
147. Kasatkin B.A.، Matvienko Yu.V. پیزوپورتر استوانه ای با ویژگی های کنترل شده. مجله آکوستیک، 1982، جلد 28، №5، ص .648-652.
148. Kasatkin B.A.، Matvienko Yu.V. دستگاه برای تابش صوتی پهنای باند. خودکار svid № 794834، 1982.
149. تجزیه و تحلیل و توسعه آنتن های آبیاری باند پهن بر اساس مبدل های پیزوکائیک. // گزارش ها در NIR "Thinker -1" //، علمی گزارش شده است. دست ها. Matvienko Yu.V.، Vladivostok، GFC Ngo Delstandart، 1983-1985.
150. توسعه و آزمایش یک مسیر رادیویی سیگنال خاص.
151. گزارش های مربوط به جزء NIR "Evolvent -Polos" //، علمی. دست ها. Matvienko Yu.V.، Vladivostok، GFC Ngo Dalstandart، 1988-1990.
152. بررسی عملکرد انتقال موجبر آکوستیک و آنتن.
153. گزارشات در Nir Aquamarine //، علمی. دست ها. Kasatkin B.A.، P. هنرمند Matvienko Yu.V.، Vladivostok، GFC Ngo Delstandart، 1989. .94c، هیچ شماره دولتی وجود ندارد 01.890.073426.
154. Kasatkin B.A.، Matvienko Yu.V. ویژگی های پالس از روش های پیزو استوانه ای. tez Dokol All-Union Conf. اقیانوس جهانی، Vladivostok، 1983، ص. شانزده
155. RYLEV N.I. ، Matvienko Yu.V.، Rylov R.N. آنتن پذیرش آنتن فاز Baaptic Side Hydroleetor. ثبت اختراع فدراسیون روسیه № 2209530، 2003
156. R.A. Monzingo، TU میلر شبکه های آنتن تطبیقی. M.، رادیو و ارتباطات، 1986، 446s.
157. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. بر روی یک روش ساخت یک گیرنده GASS برای یک دریا بسیار کوچک Sat. تحقیق و توسعه اقیانوس جهان، 6 چشم پوشی. Akust Conf.، Vladivostok، 1998، p. 162-163.
158. Matvienko Y.V.، Makarov V.N.، Kulinchenko S. I. سیستم ساده ارتباطات هیدرو اکوسیتیک در دریای کم عمق برای AUV. کشتی سازی و مهندسی اقیانوس، مشکلات و چشم انداز، Vladivostoc، 2001، p. 495-498.
159. Matvienko Yu.V.، Makarov B.H.، Kulinchenko S.I. یک سیستم ارتباطی ساده هیدرواستاتیک در یک دریا کوچک برای ANCPA به SAT. مشکلات و روش های توسعه و بهره برداری از سلاح ها و تجهیزات نظامی نیروی دریایی، شماره 32، Vladivostok، Tovmi، 2001. C.268-275.
160. K.V. Jorgenson، B.L. Grose، F.a. crandal H. Allegret. نسل جدیدی از کنترلهای پروفیل صوتی آکوستیک. -Oceans-94، vol.1، p.429-434.
161. B.C. burdick تجزیه و تحلیل سیستم های هیدرو اکوستیک. جی، Shipbuilding، 1988، 358 پ.
162. T. Lago، P. Eriksson و M. Asman. روش Symmiktos: روش تخمینی Robast و دقیق برای برآورد جریان داپلر ثابت. Oceans-93، Vol.2، P.381-386.
163. T. Lago، P. Eriksson و M. Asman. برآورد طیفی کوتاه مدت داده های فعلی داپلر داپلر. اقیانوس 96
164. H. Susaki. یک الگوریتم سریع برای اندازه گیری فرکانس دقت بالا. کاربرد به سونار داپلر اولتراسونیک. 0Ceans-2000، ص. 116-121.
165. H. Susaki. یک الگوریتم سریع برای اندازه گیری فرکانس بالا. کاربرد به سونار داپلر اولتراسونیک. IEEE Journal Oceanic Engineering، Vol.27، NO. 1، 2002، p.5-12.
166. Matvienko Yu.V.، Kulinchenko S.I.، Kuzmin A.B. تجمع شفاهی از سیگنال های پالس کوتاه برای افزایش سرعت تاخیر داپلر. در شنبه فن آوری های دریایی، Vladivostok، Dalnawka، 1998، Issu.2، ص .81-84.
167. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. ، Kuzmin A.V. دریافت دستگاه ثبت اختراع داپلر با دقت بالا از فدراسیون روسیه №2120131، 1998.
168. Matvienko Yu.V.، Kuzmin A.V. تاخیر دوپلر زیرزمینی برای ANPA. - پنجمین کنفرانس علمی و فنی روسیه "وضعیت فعلی و مشکلات ناوبری و اقیانوس شناسی" (اما 2004، سنت پترزبورگ).
169. Matvienko Yu.V.، Nurgaliev R.F.، Rylebov N.I. سیستم ردیابی هیدروکلتیک برای محل زیردریایی مستقل (ANPA). - اقیانوس آکوستیک، DOKL. 9 shk.-sem. ACAD. ji.m. Brehov Moscow، 2002، P.347-350.
170. Matvienko Yu.V.، Makarov V.N.، Nurgaliyev R.F ماژول ناوبری و پشتیبانی اطلاعات ANA. tez Dokl ، Tovvmu، Vladivostok، 1998.
171. Zolotarev V.V.، Casatkin B.A.، Kosarv G.V.، Kulinchenko S.I.، Matvienko Yu.V. مجتمع هیدروکلتیک برای دستگاه های زیر آب غیر قابل تشخیص غیر قابل تشخیص عمیق آب. نشسته کار جلسه X Rao، Moscow، 2000 S.59-62.
172. Ageev MD، Kasatkin B.A.، Matvienko Yu.V.، Rylov R.N.، Rylov N.I. ابزارهای هیدروسیتتیک از ربات زیر آب استفاده می شود. viii interddes مدرسه علمی conf "روش های مدرن و ابزار تحقیقات اقیانوسی"، مسکو، 2003، بخش 2، P.40-41.
173. Ageev MD، Vaulin Yu.V.، Kiselev Ji.B.، Matvienko Yu.V.، Rylebov N.I.، Shcherbatyuk A.F. سیستم های ناوبری زیر آب برای ANA. رابط کاربری -VIII مدرسه علمی conf "روش های مدرن و ابزار تحقیقات اقیانوس شناسی"، مسکو، 2003، بخش 2، ص. 13-22.
لطفا توجه داشته باشید که متون علمی ارائه شده در بالا برای آشنایی نوشته شده اند و به رسمیت شناختن متون اصلی پایان نامه ها (OCR) به دست آمده است. در این ارتباط، آنها ممکن است حاوی خطاهای مرتبط با ناقص الگوریتم های تشخیص باشند. در PDF پایان نامه و خلاصه نویسنده که ما چنین خطاها را ارائه می دهیم.


