Principi di costruzione attivi complessi idroacustici e sistemi soggetti: Domande: 1) Principi per la costruzione del gas attivo 2) Principi per la costruzione di gas di comunicazione e identificazione 3) Principi di costruzione di gas ministand Scopo educativo: 1. Studiare i principi di costruire il gas attivo 2. Esaminare i principi del lavoro sui regimi strutturali del gas attivo II. Obiettivo educativo 1. Attivazione delle attività cognitive del cadetto. 2. Formazione di cadetti di abilità metodiche di comando (KMN) e abilità educative (NVR). uno
 Letteratura: 1. Standard di stato dell'URSS e della Federazione Russa. GOST 2. Sistema unificato di documentazione di progettazione (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Nave macchinari idroacustici: condizione e problemi effettivi. - San Pietroburgo. : Scienza, 2004. - 410 s. 177 il. 4. I. V. Solovyov, G. N. Korolkov, A. A. Barangenko e altri. Sea Radio Electronics: directory. - San Pietroburgo. : Politecnico, 2003. - 246 p. : I L. 5. G. I. KAZANTSEV, G. G. KOTOV, V. B. Lokshin et al. Tutorial Hydroacience. - m.: Militare. Modificare. 1993. 230 s. I l. 2.
Letteratura: 1. Standard di stato dell'URSS e della Federazione Russa. GOST 2. Sistema unificato di documentazione di progettazione (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Nave macchinari idroacustici: condizione e problemi effettivi. - San Pietroburgo. : Scienza, 2004. - 410 s. 177 il. 4. I. V. Solovyov, G. N. Korolkov, A. A. Barangenko e altri. Sea Radio Electronics: directory. - San Pietroburgo. : Politecnico, 2003. - 246 p. : I L. 5. G. I. KAZANTSEV, G. G. KOTOV, V. B. Lokshin et al. Tutorial Hydroacience. - m.: Militare. Modificare. 1993. 230 s. I l. 2.
 A seconda del metodo per ottenere informazioni idroacustiche (secondo il metodo di utilizzo dell'energia), i sistemi idroacustici sono suddivisi in sistemi idroacustici attivi A) Sistemi idroacustici passivi Sistemi idroacustici attivi (mezzi) - Un dispositivo che forma e emette segnali idroacustici in Aquatic Ambiente e sui confini della sua partizione, accetta segnali riflessi o emessi da oggetti sott'acqua e superfici. I termini equivalenti del sistema idroacustico attivo sono hydrolections attivi, rimozione eco, posizione echo o solo idrolezione).
A seconda del metodo per ottenere informazioni idroacustiche (secondo il metodo di utilizzo dell'energia), i sistemi idroacustici sono suddivisi in sistemi idroacustici attivi A) Sistemi idroacustici passivi Sistemi idroacustici attivi (mezzi) - Un dispositivo che forma e emette segnali idroacustici in Aquatic Ambiente e sui confini della sua partizione, accetta segnali riflessi o emessi da oggetti sott'acqua e superfici. I termini equivalenti del sistema idroacustico attivo sono hydrolections attivi, rimozione eco, posizione echo o solo idrolezione).
 Idrogeno attivo - un metodo per rilevare e determinare le proprietà degli oggetti subacquei basati sulla radiazione dei segnali idroacustici in un mezzo acquoso, nonché la ricezione e la lavorazione dei segnali di eco, che sorgono a causa della riflessione (o della dispersione) onde acustiche da oggetti sottomarini. I mezzi idroacustici (sistemi) che forniscono idrolitici attivi sono chiamati idrocolati, stazioni di idrogeno (GLS) o percorsi di idrolizia (CH), percorsi di rimozione ECHO (EP) e misurazioni della distanza (ID) per il gas. Di solito sotto i sistemi GLAS comprensibili destinati a rilevare e misurare la distanza da PL e altri importanti oggetti sott'acqua
Idrogeno attivo - un metodo per rilevare e determinare le proprietà degli oggetti subacquei basati sulla radiazione dei segnali idroacustici in un mezzo acquoso, nonché la ricezione e la lavorazione dei segnali di eco, che sorgono a causa della riflessione (o della dispersione) onde acustiche da oggetti sottomarini. I mezzi idroacustici (sistemi) che forniscono idrolitici attivi sono chiamati idrocolati, stazioni di idrogeno (GLS) o percorsi di idrolizia (CH), percorsi di rimozione ECHO (EP) e misurazioni della distanza (ID) per il gas. Di solito sotto i sistemi GLAS comprensibili destinati a rilevare e misurare la distanza da PL e altri importanti oggetti sott'acqua

 Lo schema che riflette il principio di rilevamento e determinazione della distanza dal bersaglio della ricezione della radiazione del segnale G / A riflessa G / A segnale D \u003d CT / 2 riflessione G / A segnale
Lo schema che riflette il principio di rilevamento e determinazione della distanza dal bersaglio della ricezione della radiazione del segnale G / A riflessa G / A segnale D \u003d CT / 2 riflessione G / A segnale
 R Tratto di trasmissione (generatore) A D PULSE AVVISO SISTEMA DISPLAY SYSTEM SISTEMA SISTEMA SISTEMA SISTEMA PULSE B IN ALIMENTAZIONE SISTEMA DI ALIMENTAZIONE A B C D E E IT Formazione del dispositivo Caratteristiche ANTENNA Tratto remoto (dispositivo di ricezione) E Distanza D \u003d (C · T) / 2 Antenna acustica radiazione di ricezione
R Tratto di trasmissione (generatore) A D PULSE AVVISO SISTEMA DISPLAY SYSTEM SISTEMA SISTEMA SISTEMA SISTEMA PULSE B IN ALIMENTAZIONE SISTEMA DI ALIMENTAZIONE A B C D E E IT Formazione del dispositivo Caratteristiche ANTENNA Tratto remoto (dispositivo di ricezione) E Distanza D \u003d (C · T) / 2 Antenna acustica radiazione di ricezione

 L'antenna acustica (AA) è progettata per convertire l'energia elettrica in acustico e ritorno. I dispositivi di input vengono utilizzati per pre-migliorare i segnali ricevuti, nonché per la commutazione dell'antenna acustica con il generatore e la ricezione di dispositivi. Il generatore forma impulsi di radiazione con parametri specificati. I canali del percorso di rilevamento della ricezione risolvono i problemi di rilevare oggetti subacquei e una definizione approssimativa delle loro coordinate. I canali di chiarimenti delle coordinate sono progettati per determinare con precisione le coordinate di oggetti sottomarini, seguiti da emettendoli al sistema di controllo delle armi.
L'antenna acustica (AA) è progettata per convertire l'energia elettrica in acustico e ritorno. I dispositivi di input vengono utilizzati per pre-migliorare i segnali ricevuti, nonché per la commutazione dell'antenna acustica con il generatore e la ricezione di dispositivi. Il generatore forma impulsi di radiazione con parametri specificati. I canali del percorso di rilevamento della ricezione risolvono i problemi di rilevare oggetti subacquei e una definizione approssimativa delle loro coordinate. I canali di chiarimenti delle coordinate sono progettati per determinare con precisione le coordinate di oggetti sottomarini, seguiti da emettendoli al sistema di controllo delle armi.
 I sistemi di supporto semi-automatico degli obiettivi consentono di eseguire il supporto per i bersagli in modalità semi-automatica con rimozione automatica delle coordinate correnti. Il canale di ascolto consente di ascoltare i segnali delle voci ricevuti per la classificazione del contatto idroacustico con l'obiettivo. Il sistema di visualizzazione è un dispositivo di uscita ed è necessario per la visualizzazione visiva delle informazioni ricevute e rimuovere i dati di destinazione. Il sistema di gestione e sincronizzazione è un collegamento tra tutti i dispositivi e i sistemi GLS.
I sistemi di supporto semi-automatico degli obiettivi consentono di eseguire il supporto per i bersagli in modalità semi-automatica con rimozione automatica delle coordinate correnti. Il canale di ascolto consente di ascoltare i segnali delle voci ricevuti per la classificazione del contatto idroacustico con l'obiettivo. Il sistema di visualizzazione è un dispositivo di uscita ed è necessario per la visualizzazione visiva delle informazioni ricevute e rimuovere i dati di destinazione. Il sistema di gestione e sincronizzazione è un collegamento tra tutti i dispositivi e i sistemi GLS.
 Il dispositivo di formazione incorporato (VUCU) ha lo scopo di elaborare le competenze dell'operatore da parte del bersaglio, nonché le competenze sulla gestione di GLS in varie modalità. Sistema di controllo automatico integrato (ACC) consente di controllare il principale specifiche tecniche GLS, identifica i suoi difetti. Il GLS è incluso nell'operazione fornendo le tensioni di alimentazione a tutti i dispositivi, per questo, la stazione ha uno scudo di distribuzione su cui viene visualizzato il sistema di controllo del sistema di alimentazione del sistema di alimentazione.
Il dispositivo di formazione incorporato (VUCU) ha lo scopo di elaborare le competenze dell'operatore da parte del bersaglio, nonché le competenze sulla gestione di GLS in varie modalità. Sistema di controllo automatico integrato (ACC) consente di controllare il principale specifiche tecniche GLS, identifica i suoi difetti. Il GLS è incluso nell'operazione fornendo le tensioni di alimentazione a tutti i dispositivi, per questo, la stazione ha uno scudo di distribuzione su cui viene visualizzato il sistema di controllo del sistema di alimentazione del sistema di alimentazione.
 Secondo il metodo di recensito della zona idrica della revisione circolare (Ko) 360 Sector Review (CO) 25 0 Recensione di riunione (SHO) 0 360 Sectory Sector Review (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0.
Secondo il metodo di recensito della zona idrica della revisione circolare (Ko) 360 Sector Review (CO) 25 0 Recensione di riunione (SHO) 0 360 Sectory Sector Review (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0.


 Fico. 4. Vista dell'indicatore con un riso a scansione a spirale. 9. Visualizza i segni dagli obiettivi sull'indicatore con una riga di riso di scansione. 5. Vista dell'indicatore con una linea di scansione di riso. 10. Vista dell'indicatore con campane e distanze
Fico. 4. Vista dell'indicatore con un riso a scansione a spirale. 9. Visualizza i segni dagli obiettivi sull'indicatore con una riga di riso di scansione. 5. Vista dell'indicatore con una linea di scansione di riso. 10. Vista dell'indicatore con campane e distanze



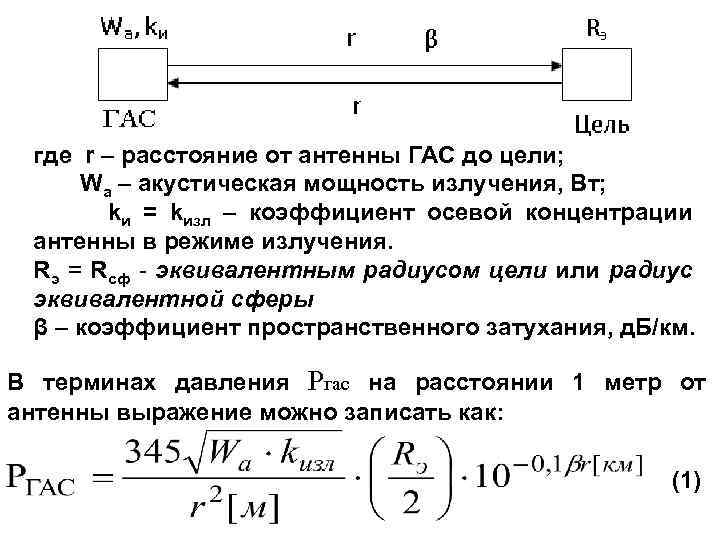 dove r è la distanza dall'antenna del gas all'obiettivo; Wa - potenza acustica radiazione, w; Ki \u003d kizl - il coefficiente di concentrazione assiale dell'antenna in modalità radiazione. RE \u003d RSF - Raggio o raggio di destinazione equivalente o raggio della sfera equivalente β è il coefficiente di attenuazione spaziale, d. B / km. In termini di pressione di RGAS ad una distanza di 1 metro dall'antenna, l'espressione può essere scritta come: (1)
dove r è la distanza dall'antenna del gas all'obiettivo; Wa - potenza acustica radiazione, w; Ki \u003d kizl - il coefficiente di concentrazione assiale dell'antenna in modalità radiazione. RE \u003d RSF - Raggio o raggio di destinazione equivalente o raggio della sfera equivalente β è il coefficiente di attenuazione spaziale, d. B / km. In termini di pressione di RGAS ad una distanza di 1 metro dall'antenna, l'espressione può essere scritta come: (1)
 Definiamo il livello di un segnale di eco dal target relativo al livello zero P 0, usando la relazione (1) e lo prologò con un algoritmo decimale: introduciamo la notazione: - il livello del segnale di eco nel punto del punto Disposizione dell'antenna del gas, nel d. B; - livello di radiazione, in d. B; - Questo è il valore espresso nel d. B e caratterizzando la riflettività dell'oggetto.
Definiamo il livello di un segnale di eco dal target relativo al livello zero P 0, usando la relazione (1) e lo prologò con un algoritmo decimale: introduciamo la notazione: - il livello del segnale di eco nel punto del punto Disposizione dell'antenna del gas, nel d. B; - livello di radiazione, in d. B; - Questo è il valore espresso nel d. B e caratterizzando la riflettività dell'oggetto.
 PR - Perdite standard in propagazione, in d. B, tenendo conto dell'indebolimento del segnale quando si propaga dall'antenna del gas all'obiettivo e indietro tenendo conto della legge sferica della distribuzione. Tenendo conto delle designazioni introdotte, l'espressione prende il modulo: Ngas \u003d UI + CC - 2 PR (2) della formula (2) viene utilizzato per stimare il livello del segnale eco dall'obiettivo al punto di ricezione in un illimitato in modo omogeno Ambiente senza interferenze.
PR - Perdite standard in propagazione, in d. B, tenendo conto dell'indebolimento del segnale quando si propaga dall'antenna del gas all'obiettivo e indietro tenendo conto della legge sferica della distribuzione. Tenendo conto delle designazioni introdotte, l'espressione prende il modulo: Ngas \u003d UI + CC - 2 PR (2) della formula (2) viene utilizzato per stimare il livello del segnale eco dall'obiettivo al punto di ricezione in un illimitato in modo omogeno Ambiente senza interferenze.
 Considerando l'elaborazione del segnale di utilità di RGAS \u003d PC e interferenza con RP in gas e considerando il coefficiente di riconoscimento Δ, è possibile registrare la seguente espressione del RGAS \u003d PC \u003d Δ RP Intervallo di energia Equazione della modalità CH (EE): \u003d dove k è il coefficiente di concentrazione assiale dell'antenna; ΔF - banda di frequenza (intervallo) del percorso della ricezione del gas, Hz; F 0 è la frequenza media della gamma, a. Hz; β \u003d 0, 036 f 03/2 [k. Hz] - Coefficiente di attenuazione spaziale, d. B / km.
Considerando l'elaborazione del segnale di utilità di RGAS \u003d PC e interferenza con RP in gas e considerando il coefficiente di riconoscimento Δ, è possibile registrare la seguente espressione del RGAS \u003d PC \u003d Δ RP Intervallo di energia Equazione della modalità CH (EE): \u003d dove k è il coefficiente di concentrazione assiale dell'antenna; ΔF - banda di frequenza (intervallo) del percorso della ricezione del gas, Hz; F 0 è la frequenza media della gamma, a. Hz; β \u003d 0, 036 f 03/2 [k. Hz] - Coefficiente di attenuazione spaziale, d. B / km.
 Gas on PN ANTENNA GAS UI PR SKU UP POP OND INGLIC DESTRICI Affitto di carica di CHA (EP) in forma simbolica può essere registrato (tenendo conto del segno "-") come: EP \u003d - (UI + SC-up - PO + PN) \u003d 2 PR EP \u003d UE (livello di interferenza) \u003d
Gas on PN ANTENNA GAS UI PR SKU UP POP OND INGLIC DESTRICI Affitto di carica di CHA (EP) in forma simbolica può essere registrato (tenendo conto del segno "-") come: EP \u003d - (UI + SC-up - PO + PN) \u003d 2 PR EP \u003d UE (livello di interferenza) \u003d
 Software (soglia di rilevamento) \u003d lun (indicatore di direzione) \u003d gas attivo: - Misurazioni a distanza a gas - Comunicazione a gas - Gas imective - Gas ministance - Gas di ritmo siuroso - Gas di Develisci Fornitura Sworts e Gas aggiuntivo - Gas - Gas-Gas - Gas di illuminazione e sviluppo - Idroacustico GALS - Revisione del lato del gas
Software (soglia di rilevamento) \u003d lun (indicatore di direzione) \u003d gas attivo: - Misurazioni a distanza a gas - Comunicazione a gas - Gas imective - Gas ministance - Gas di ritmo siuroso - Gas di Develisci Fornitura Sworts e Gas aggiuntivo - Gas - Gas-Gas - Gas di illuminazione e sviluppo - Idroacustico GALS - Revisione del lato del gas

 L'armamento idroacostico dell'NK è composto da: Øgak MGK-335 "Platinum" - un complesso idroacustico di rilevamento, targeting e comunicazione; ØGAK MGK-345 "Bronzo" - un complesso idroacustico di rilevamento, targeting e comunicazioni; Øgak MGK-355 "Polynom" è un complesso idroacustico di rilevamento del PL e dell'emissione della designazione target di bracci anti-sottomarini; Ø Tags MG-332 "Arun", Gas MG-332 T "ARGUN-T" - Una stazione idroacustica di rilevamento e targeting per navi antiche; Ø Tags MG-329 "OKA", Gas mg-329 m "OKA-M" - Una stazione idroacustica abbassata; Ø Tags MG-339 "Stemon" o Gas MG-339 T "Schend-T" - Una stazione di rilevamento idroacustica, determinazione delle coordinate, della comunicazione e dell'identificazione;
L'armamento idroacostico dell'NK è composto da: Øgak MGK-335 "Platinum" - un complesso idroacustico di rilevamento, targeting e comunicazione; ØGAK MGK-345 "Bronzo" - un complesso idroacustico di rilevamento, targeting e comunicazioni; Øgak MGK-355 "Polynom" è un complesso idroacustico di rilevamento del PL e dell'emissione della designazione target di bracci anti-sottomarini; Ø Tags MG-332 "Arun", Gas MG-332 T "ARGUN-T" - Una stazione idroacustica di rilevamento e targeting per navi antiche; Ø Tags MG-329 "OKA", Gas mg-329 m "OKA-M" - Una stazione idroacustica abbassata; Ø Tags MG-339 "Stemon" o Gas MG-339 T "Schend-T" - Una stazione di rilevamento idroacustica, determinazione delle coordinate, della comunicazione e dell'identificazione;
 Ø Tags MG-79 o Gas MG-89 "Sulna" - Una stazione idroacouata di rilevamento di ancore e miniere di fondo; Ø Tags MG-7 "Braccialetto" e Gas MG-737 "Amulet-3" - Una stazione idroacustica di scoperta di forze e mezzi di sabotaggio sott'acqua; ØGAS mg-26 "host" o gas mg-45 "backgammon" - apparecchiature idroacustiche e identificative. Ø Tags KMG-12 "Cassandra" - lo strumento di classificazione degli obiettivi per le stazioni idroacustiche delle navi superficiali quando funzionano in modalità attiva. Ø Tag MG-409 C è un sistema di rilevamento passivo di BUTO HYDROACOSTIC. Ø Tag "Altyn" - Attrezzature per misurare la distribuzione verticale della velocità del suono in acqua dalla nave della superficie; ØGAS MI-110 km - lo strumento di rilevamento della traccia di fissaggio dell'APL.
Ø Tags MG-79 o Gas MG-89 "Sulna" - Una stazione idroacouata di rilevamento di ancore e miniere di fondo; Ø Tags MG-7 "Braccialetto" e Gas MG-737 "Amulet-3" - Una stazione idroacustica di scoperta di forze e mezzi di sabotaggio sott'acqua; ØGAS mg-26 "host" o gas mg-45 "backgammon" - apparecchiature idroacustiche e identificative. Ø Tags KMG-12 "Cassandra" - lo strumento di classificazione degli obiettivi per le stazioni idroacustiche delle navi superficiali quando funzionano in modalità attiva. Ø Tag MG-409 C è un sistema di rilevamento passivo di BUTO HYDROACOSTIC. Ø Tag "Altyn" - Attrezzature per misurare la distribuzione verticale della velocità del suono in acqua dalla nave della superficie; ØGAS MI-110 km - lo strumento di rilevamento della traccia di fissaggio dell'APL.
 Fico. 1. Project Rocket Cruiser 1164 in servizio del progetto 1164 Armi idroacustiche: Q GAK MGK-335 "PLATINUM"; Q Gas MG-7 "Braccialetto" - 2 set; Q Gas MG-737 "Amulet-3"; Q Gas KMG-12 "Cassandra". C'è il seguente
Fico. 1. Project Rocket Cruiser 1164 in servizio del progetto 1164 Armi idroacustiche: Q GAK MGK-335 "PLATINUM"; Q Gas MG-7 "Braccialetto" - 2 set; Q Gas MG-737 "Amulet-3"; Q Gas KMG-12 "Cassandra". C'è il seguente
 Fico. 2. Grande nave anti-sottomarino del progetto 1155 (1155. 1) Il seguente armamento idroacustico è in servizio con progetto 1155: Gak MGK-335 "Platinum"; Gas mg-7 "Braccialetto" - 2 set; Gus "Altyn"; Gas MI-110 km. In servizio del progetto 1155. 1 è la seguente arma idroacustica: Gak MGK-355 "Polin"; Gas mg-7 "Braccialetto" - 2 set; Gus "Altyn"; Gas MI-110 km.
Fico. 2. Grande nave anti-sottomarino del progetto 1155 (1155. 1) Il seguente armamento idroacustico è in servizio con progetto 1155: Gak MGK-335 "Platinum"; Gas mg-7 "Braccialetto" - 2 set; Gus "Altyn"; Gas MI-110 km. In servizio del progetto 1155. 1 è la seguente arma idroacustica: Gak MGK-355 "Polin"; Gas mg-7 "Braccialetto" - 2 set; Gus "Altyn"; Gas MI-110 km.
 Fico. 3. Project Ship 956. Classe: razzo-artiglieria, sottoclasse: missione squarciata. 1 grado in servizio del progetto 956 è le seguenti armi idroacustiche: Gak MGK-355 "Polin"; Gas mg-7 "Braccialetto" - 2 set; Gas KMG-12 "Cassandra".
Fico. 3. Project Ship 956. Classe: razzo-artiglieria, sottoclasse: missione squarciata. 1 grado in servizio del progetto 956 è le seguenti armi idroacustiche: Gak MGK-355 "Polin"; Gas mg-7 "Braccialetto" - 2 set; Gas KMG-12 "Cassandra".
 Fico. 4. Project Rocket Boat 1241. 2 In servizio del progetto 1241. 2 Esistono le seguenti armi idroacustiche: GAK MGK-345 "Bronzo"; Gas mg-45 "backgammon";
Fico. 4. Project Rocket Boat 1241. 2 In servizio del progetto 1241. 2 Esistono le seguenti armi idroacustiche: GAK MGK-345 "Bronzo"; Gas mg-45 "backgammon";
 Fico. 5. La barca torpedica del progetto 1241 in servizio del progetto 1241 è le seguenti armi idroacustiche: Gak MGK-345 "Bronzo"; Gas mg-45 "backgammon";
Fico. 5. La barca torpedica del progetto 1241 in servizio del progetto 1241 è le seguenti armi idroacustiche: Gak MGK-345 "Bronzo"; Gas mg-45 "backgammon";
 Fico. 6. Piccola nave anti-sottomarina del progetto 1124 In servizio del progetto 1124 ci sono le seguenti armi idroacustiche: gas MG-339 "Stemone" o Gas MG-339 T "Schend-T"; Alcuni progetti sono armati con GAC MGK-335 "Platinum"; Gas mg-322 "argun" o gas mg-322 T "argun-t"; Gas MG-329 "OKA" o Gas mg-329 m "OKA-M"; Gas mg-26 "host" o gas mg-45 "backgammon"; Gas KMG-12 "Cassandra". Gas mg-409 S.
Fico. 6. Piccola nave anti-sottomarina del progetto 1124 In servizio del progetto 1124 ci sono le seguenti armi idroacustiche: gas MG-339 "Stemone" o Gas MG-339 T "Schend-T"; Alcuni progetti sono armati con GAC MGK-335 "Platinum"; Gas mg-322 "argun" o gas mg-322 T "argun-t"; Gas MG-329 "OKA" o Gas mg-329 m "OKA-M"; Gas mg-26 "host" o gas mg-45 "backgammon"; Gas KMG-12 "Cassandra". Gas mg-409 S.
 Fico. 7. Project BTSCH Trailer BSCH 1265 (AVE. 260, 270) In servizio del progetto 1265 contiene le seguenti armi idroacustiche: gas MG-79 o gas MG-89 "Sulna"; GUS "KABARGA";
Fico. 7. Project BTSCH Trailer BSCH 1265 (AVE. 260, 270) In servizio del progetto 1265 contiene le seguenti armi idroacustiche: gas MG-79 o gas MG-89 "Sulna"; GUS "KABARGA";
 Fico. 8. Una grande nave di atterraggio del progetto del progetto 775 775 in servizio del progetto 775 è le seguenti armi idroacustiche: Braccialetto MG-7 "Gas"; Gas mg-26 "host" o gas mg-45 "backgammon".
Fico. 8. Una grande nave di atterraggio del progetto del progetto 775 775 in servizio del progetto 775 è le seguenti armi idroacustiche: Braccialetto MG-7 "Gas"; Gas mg-26 "host" o gas mg-45 "backgammon".
 Stazioni idroacustiche "Tamir-11" (1953) Gas per navi superficiali di piccolo spostamento Il numero totale di dispositivi - 17 massa degli strumenti - 1000 kg. Progettista capo Vovochnoe B. N.
Stazioni idroacustiche "Tamir-11" (1953) Gas per navi superficiali di piccolo spostamento Il numero totale di dispositivi - 17 massa degli strumenti - 1000 kg. Progettista capo Vovochnoe B. N.
 Stazioni idroacustiche Ercole (1957) Gas per navi superficiali di spostamento medio e grande Numero totale di dispositivi - 30 massa di strumenti - 5800 kg Progettista capo Umikov z.n.
Stazioni idroacustiche Ercole (1957) Gas per navi superficiali di spostamento medio e grande Numero totale di dispositivi - 30 massa di strumenti - 5800 kg Progettista capo Umikov z.n.
 Stazioni idroacustiche "Mezen-2" (1963) Rilevamento del gas del fondo min. Numero totale di dispositivi Massa di strumenti - 12 - 2100 kg Capo Designer Basso Novo I. I.
Stazioni idroacustiche "Mezen-2" (1963) Rilevamento del gas del fondo min. Numero totale di dispositivi Massa di strumenti - 12 - 2100 kg Capo Designer Basso Novo I. I.
 Stazioni idroacustiche "Kashalot" (1963) Gas per la ricerca di navi affondate Il numero totale di strumenti - 22 massa degli strumenti - 4000 kg (senza zip) capo designer Timokov N. A.
Stazioni idroacustiche "Kashalot" (1963) Gas per la ricerca di navi affondate Il numero totale di strumenti - 22 massa degli strumenti - 4000 kg (senza zip) capo designer Timokov N. A.
 Complessi idroacostici "Rubin" (1964) Gak per il Progettista principale dei sottomarini multiuso Ayalashka E. I. Numero totale di dispositivi - 56 massa di strumenti - 54747 kg
Complessi idroacostici "Rubin" (1964) Gak per il Progettista principale dei sottomarini multiuso Ayalashka E. I. Numero totale di dispositivi - 56 massa di strumenti - 54747 kg
 Stazioni idroacustiche "Titan-2" (1966) Gas per grandi navi anti-sottomarini Dispositivi totali Massa di strumenti - 37 - 16000 kg Progettista capo Designer HARAT G. M.
Stazioni idroacustiche "Titan-2" (1966) Gas per grandi navi anti-sottomarini Dispositivi totali Massa di strumenti - 37 - 16000 kg Progettista capo Designer HARAT G. M.
 Stazioni idroacustiche "argun" (1967) Gus per piccole navi anti-sottomarini dispositivi totali massa di strumenti - 30 - 7600 kg con capo designer zip Ivanchenko V. P.
Stazioni idroacustiche "argun" (1967) Gus per piccole navi anti-sottomarini dispositivi totali massa di strumenti - 30 - 7600 kg con capo designer zip Ivanchenko V. P.
 Stazioni idroacustiche "Sulna" (1969) Rilevamento del gas delle miniere di ancoraggio e fondo Il numero totale di dispositivi Massa di strumenti - 20 - 3900 kg Progettista capo Lyashenko G. G.
Stazioni idroacustiche "Sulna" (1969) Rilevamento del gas delle miniere di ancoraggio e fondo Il numero totale di dispositivi Massa di strumenti - 20 - 3900 kg Progettista capo Lyashenko G. G.
 Stazioni idroacustiche "Beech" (1971) Gas per i tribunali di ricerca Numero totale di strumenti Massa di strumenti - 30 - 11.000 kg Progettista capo Klimenko J. P.
Stazioni idroacustiche "Beech" (1971) Gas per i tribunali di ricerca Numero totale di strumenti Massa di strumenti - 30 - 11.000 kg Progettista capo Klimenko J. P.
 Complessi idroacostici "Platinum" (1972) Gak per navi superficiali di Designer Capo di spostamento medio e grande Klimovitsky L. D. Numero di strumenti - 64 massa di strumenti - 23 tonnellate
Complessi idroacostici "Platinum" (1972) Gak per navi superficiali di Designer Capo di spostamento medio e grande Klimovitsky L. D. Numero di strumenti - 64 massa di strumenti - 23 tonnellate
 Complessi idroacostici "Polynom" (1979) Gak per il NC di grande designer di spostamento SOLOVIEV V. G. Numero totale di strumenti - 152 massa di strumenti - 72.000
Complessi idroacostici "Polynom" (1979) Gak per il NC di grande designer di spostamento SOLOVIEV V. G. Numero totale di strumenti - 152 massa di strumenti - 72.000
 Complessi idroacustici "Star-M 1" (1986) Digital Guincy per NK Designer Capo di Displacement Medio Alessandro Numero totale di dispositivi - 64 Dispositivi di massa - 23000 kg
Complessi idroacustici "Star-M 1" (1986) Digital Guincy per NK Designer Capo di Displacement Medio Alessandro Numero totale di dispositivi - 64 Dispositivi di massa - 23000 kg
 Complessi idroacustici di "Kabarga" (1987) Gus Miniscovers per sentieri marini, base e raid Numero totale di dispositivi - 42 massa di strumenti - 8500 kg Progettista capo Lyashenko G. G.
Complessi idroacustici di "Kabarga" (1987) Gus Miniscovers per sentieri marini, base e raid Numero totale di dispositivi - 42 massa di strumenti - 8500 kg Progettista capo Lyashenko G. G.
 Complessi idroacustici "Star m 1 -01" (1988) Gas digitale per navi superficiali di piccolo designer di spostamento Alessanno Alessaryko O. M. Numero totale di dispositivi - 60 massa di strumenti - 16.500 kg
Complessi idroacustici "Star m 1 -01" (1988) Gas digitale per navi superficiali di piccolo designer di spostamento Alessanno Alessaryko O. M. Numero totale di dispositivi - 60 massa di strumenti - 16.500 kg
 Complessi idroacustici "Star-2" (1993) Digital Guck per NC Grande Designer Chief Designer Borisenko N. N. Numero totale di dispositivi - 127 Dispositivi di massa - 77742 kg
Complessi idroacustici "Star-2" (1993) Digital Guck per NC Grande Designer Chief Designer Borisenko N. N. Numero totale di dispositivi - 127 Dispositivi di massa - 77742 kg

 Prospettiva Complexes Corvette Project 12441, che prevede l'installazione di gas "Zarya-2"
Prospettiva Complexes Corvette Project 12441, che prevede l'installazione di gas "Zarya-2"
Soviet Diesel-Electric Sottomarini del Building post-War Gagin Vladimir Vladimirovich
Complessi idroacustici PL nella lotta anti-sottomarina
Le barche diesel-elettriche dei primi progetti postbellici "pavimentarono la strada" per gli equipaggi dei moderni sottomarini, nelle campagne dell'oceano, ottenendo il funzionamento di funzionamento delle attrezzature militari, padroneggiando le tecniche di nuoto trattato, studiando la situazione idrologica e idrografica di aree strategicamente importanti dell'oceano, praticando le tattiche di anti-trimestre e anti-wortr.
Le tattiche della lotta anti-sottomarina sono spesso ridotte alla ricerca e alla rilevazione dell'Aquila PL usando i mezzi idroacustici prima del nemico.
Allo stesso tempo, lo stato del mezzo circostante acquisisce il valore più importante, in particolare tali parametri, come le zone della convergenza acustica e la posizione del sottomarino relative alla "Termocline".
Le zone di convergenza sono aree a forma di anello intorno alla nave subacquea. Il suono che si dirige dal punto di convergenza situato nella zona di convergenza è rivolta a seconda della pressione e della temperatura dell'acqua, si muove su e giù rispetto alla superficie della spirale attraverso intervalli irregolari, che dipendono anche dallo stato dei dintorni ambiente.
Il comandante della nave, cercando di non cadere in queste aree - per quanto riguarda la sua opinione, l'obiettivo è, può evitare il rilevamento. Per fare ciò, ha bisogno di essere all'interno delle aree in cui si applica il suono alla sua fonte è semplicemente radialmente.
Il modo più semplice è prendere una posizione sopra lo strato di salto della temperatura (Termocline) o sotto di esso in modo che condivide i sottomarini - allora i suoni pubblicati dal suo motore si rifletterà molto probabilmente dallo strato e la barca nemica non lo rileverà .
Il salto della temperatura è uno strato di confine di spazio subacqueo, che separa calda acqua superficiale e aree profonde più fredde.
I sottomarini diesel insieme ad atomici, occupano un posto di rilievo nei piani aggressivi del blocco della NATO dei paesi della NATO. Secondo il libro di riferimento "Jane", a metà del 1980, nelle flotte dell'Unione Nord Atlantico, c'erano 186 barche diesel.
I sottomarini Diesel hanno alcuni vantaggi dell'Atomico, sono collegati, in particolare, meno rumore, che migliora le condizioni per il funzionamento delle stazioni idroacustiche (gas) durante la risoluzione dei problemi della lotta anti-sottomarina.
Attualmente, secondo la stampa straniera, l'integrazione della tecnologia idroacostico con i sistemi di gestione del BIU e dell'arma che si verificano sulla base di un ampio uso dei computer. Di conseguenza, le capacità tattiche dell'attrezzatura idroacustica sono cambiate qualitativamente. La probabilità di rilevare obiettivi e classificazione del contatto ricevuto è aumentata. Inoltre, è diventato reale allo stesso tempo di monitorare diversi (fino a sei) bersagli e rilevare rapidamente i cambiamenti nella loro manovra, ottenere automaticamente le informazioni e rilasciano continuamente in tutti i sistemi di coniugazione e chiaramente, in una comoda applicazione comodamente, da visualizzare in modo conveniente Schermi e schermi e, se necessario, registrati.
L'elaborazione del segnale digitale ha permesso ai sistemi di localizzazione passiva del sottomarino per determinare solo il rumore del portatore e la distanza ad esso.
Finalmente integrazione vari sistemi Sulla base del controllo semplificato EMM sul lavoro e sulla manutenzione del gas e ha permesso di ridurre il personale di servizio, che è importante per lo spostamento idrico relativamente piccolo dei sottomarini diesel.
Il tratto principale della stazione acustica è la noisalessness con una gamma di diverse decine di chilometri. Nella bassa frequenza (220 Hz - 7 kHz) il range di ricezione del segnale avviene su un conformario (combinato con le parti del corpo dell'alloggiamento) un'antenna acustica costituita da idrofoni piezoceramici e in alta frequenza (8 kHz) - su a Antenna cilindrica con idrofoni di zirconato di piombo, posizionato vicino a Kiel. L'antenna cilindrica serve anche a tracciare diversi (fino a quattro) bersagli. Entrambi i canali di ridondanza del rumore si completano a vicenda. Lo spazio circostante è trascurato da un rapido sondaggio coerente di un gran numero di petali staticamente formati dell'orientamento direzionale. Rilevati Tariffe rumorose sbucciate con un metodo equivalente ad alta precisione.
Il tratto attivo ha permesso di condurre una revisione circolare con la radiazione omnidirezionale di un pacco o quando la serie di pacchi in sequenzialmente cambiano le indicazioni, oltre a emettere singoli pacchi in una direzione specifica. I segnali ECHO accettati vengono visualizzati sulla schermata Indicatore e possono essere registrati per misurare il turno di frequenza Doppler.
Il percorso della posizione passiva ha tre antenne riceventi, installati a filo con l'alloggiamento in nasale, centrale e a poppa, per ciascun lato del sottomarino. Prendono obiettivi di rumore che sono soggetti a elaborazione di correlazione, il che consente di determinare il luogo di destinazione per tre linee di posizione con una precisione sufficiente. Le antenne del percorso possono essere utilizzate come ulteriore rimozione del rumore per il percorso.
La stazione fornisce comunicazioni soeree dirette e non direzionali.
Il percorso di rilevamento del segnale degli idrolizzatori consente di rilevare segnali di impulsi di varie origini ad una distanza di diverse decine di chilometri, determinare la loro frequenza, durata e direzione alla fonte del segnale.
Nella costruzione della stazione, i circuiti integrati sono ampiamente utilizzati, a causa della cui dimensione e peso sono ridotti, l'affidabilità è aumentata. I dati sugli obiettivi vengono visualizzati su due schermate, passano automaticamente all'auto-packer AUM di un sistema di ripresa del Torpedo in cui i comandi sono prodotti per la cottura.
È stata sviluppata una stazione idroacustica più semplice. Include percorsi di rumore, echi e posizione passiva. La ricerca e il rilevamento degli obiettivi vengono eseguiti in modalità rilevante utilizzando il metodo di correzione del metodo di elaborazione del segnale. Dopo che lo scopo viene rilevato, la distanza da esso è misurata dalla radiazione del singolo pacco direzionale o dal metodo della posizione passiva.
Al fine di aumentare l'efficienza dell'uso di strumenti di osservazione idroacustica sui sottomarini, gli strumenti hanno anche dispositivi per misurare la velocità della propagazione del suono in acqua e per segnalare circa l'inizio del verificarsi della cavitazione delle viti di canottaggio, dispositivi per il controllo del livello del proprio rumore .
Per aumentare l'efficienza dell'uso del gas, c'è un dispositivo per la costruzione di dipinti radiali in base ai dati di input sulla distribuzione effettiva della velocità di propagazione del suono con una profondità crescente. Il sistema è in grado di funzionare nella modalità del simulatore con la simulazione dei segnali che entrano nel suo ingresso da vari scopi. Tutte le informazioni correnti inserite nel sistema nel processo di lavoro di combattimento e prodotte da esso possono essere registrate per la successiva riproduzione e analisi. Il sistema è servito da uno o due operatori.
Il gas di altri tipi ha antenne partizionate cilindriche. Per un punto di vista circolare, 96 petali del modello di radiazione sono formati staticamente.
La determinazione delle coordinate degli obiettivi rilevati e del monitoraggio è eseguita simultaneamente in tutte le modalità utilizzando un computer. In modalità attiva, per ottenere una gamma massima di azione, è fornita per il coordinamento dei parametri di radiazione (potenza emessa, frequenza, tipo di modulazione del pacco) con effetti idrauliche effettive nell'area di osservazione.
Nella modalità di rilevamento dei segnali. I sistemi idrolocatori sono determinati dal cuscinetto sulla fonte del segnale, la sua frequenza e ampiezza, la durata degli impulsi, la frequenza di loro seguente e classificare le fonti di radiazione lungo la totalità di tutte queste caratteristiche.
La stazione può anche lavorare nelle modalità ausiliarie: simulatore, inserimento e controllo automatico della condizione tecnica che garantisce il rilevamento dei moduli difettosi.
Tutti i controlli e due schermi si trovano sulla console del gas. Su uno di loro con un'indicazione tricolore, che rappresenta un indicatore di revisione circolare, simultaneamente visualizzato nella parte centrale. Impostazione completa con la sua nave nel centro e sulla scala circolare delle campane e sui bordi - Informazioni di testo complete sugli obiettivi accompagnati ( Distanze, portatore, i valori di Doppler Frequency Shifts, Corsi, velocità), dati sul corso e la velocità della tua nave, sulla modalità e sui parametri di funzionamento del gas. Le matrici gerarchiche del testo vengono visualizzate sulla seconda schermata, il cui trattamento consente di ottimizzare il processo di controllo dell'apparecchiatura. Tale presentazione di informazioni semplifica in modo significativo il servizio e il funzionamento della stazione e consente di eseguire questo a un operatore.
Nel novembre 1983, l'APL di Victor-III ha ricevuto un compito per rimuovere il rumore e altre caratteristiche del quarto razzo americano di tipo Ohio.
Secondo l'equipaggio, il giovane ambizioso capitano del nostro sottomarino, ispirato agli esempi dei sottomarini degli eroi della guerra patriottica, ha deciso quasi di andare alla baia della base di Sugostite.
Per il travestimento acustico, il K-324 nel mare di Sargasso è venuto sotto una piccola nave, che ha seguito il corso appropriato. Tutto è andato bene, come all'improvviso la velocità del nostro PL. Ha iniziato a cadere rapidamente, nonostante l'aumento della turbina si trasforma al massimo.
Nessun innesco e indovina dell'equipaggio ai risultati positivi a LED - la velocità è scesa a tre nodi.
Possiamo fare qualsiasi cosa - ho dovuto galleggiare. Per apparire quasi in mente le banche statunitensi, nel "tana" stessa, per così dire.
Per l'ispezione della vite principale, i serbatoi nasali compilati, la barca ha acquisito un differenziale decente sul naso e una squadra di emergenza, armata di due "Kalashnikov" e due PM (tutto l'Arsenal esistente sul sottomarino sovietico) ha esaminato il feed parte. Così è, un cavo si è scoperto per essere avvolto sull'albero, molto resistente, non andarsene, né code automatiche: tutti gli sforzi erano vaniti.
Il comandante ha accettato la decisione - andare a Cuba in una posizione notturna. Fu allora il suo e catturato piloti americani, marinai e turisti su yacht di piacere.
Con un dolore a metà a Cuba, Delzli. Il comandante ha immediatamente chiamato al "tappeto". Ma, contrariamente alle tristi ipotesi sul suo destino, il capitano "a cavallo" è tornato, il capitano ferita sulla vite dal disperato sottomarino è stato restituito, si è rivelato essere nient'altro che l'antenna idroacustica americana più recente che gli americani non avevano testato una nave sgradevole.
I nostri scienziati e tecnologi hanno ricevuto materiali preziosi per esplorare ...

Emergency PL K-324 in Sargasso Sea
Dal libro di battaglia per Stars-2. Confronto dello spazio (parte II) Autore Perhearsh Anton Ivanovich.Complesso di combattimento orbitale per "Burana" ricordiamo che il rucolamento e il complesso spaziale di Energy-Buran è stato creato su richiesta del Ministero della Difesa per risolvere i problemi militari nello spazio vicino. È chiaro che in una volta i carichi complessi sono stati sviluppati con il complesso per
Dalla gestione della qualità del libro Autore Shevchuk Denis Aleksandrovich.1.2. Gestione della qualità come fattore nel successo dell'impresa nell'economia del mercato della lotta concorrenziale come uno di delle caratteristiche più importanti Include la concorrenza tra soggetti e oggetti di mercato. Sotto la concorrenza comprendi la rivalità tra individui o
Dal libro navi marziali del mondo al turno dei secoli XX - XXI, parte III Frigates Autore Apalkov Yuri Valentinovich.Sistemi di sistemi missili anti-aereo USA Composizione e TTX "STANDARD * SM-1" standard "SM-1" SM-1 MK 57 NATO "Sea Sparrow" "Sea Chapparel" Sviluppatore del paese Stati Uniti d'America Generale Dinamics Corporation, Air Defense Division USA General Dinamics Corporation, Air Defense Divisione USA. NATO Raytheon Sistemi elettronici, Hughes Missile Systems Company USA Lockheed Martin Aeronutronic
Dal libro Soviet Soviet Diesel-Electric Sottomarine della costruzione del dopoguerra Autore Gagin Vladimir Vladimirovich.Complexs missilismi anti-sottomarino Composizione e TTX "Misel" "Floor-B" "Cascata" "Medveda" ASROC CY-1 Figli di MilaStrastrance della Russia Raduboga Russia "Novatore" Russia "Mirteplyekheni-Ka" US Lockheed Martin Tactical Defense Systems CMTEC Adozione Gie Milas.
Dal libro. Armi del razzo domestico Autore Primo, Mikhail AndreevichAlcuni aspetti della lotta anti-sottomarina Le forze sottomarine dopo la seconda guerra mondiale hanno subito cambiamenti qualitativi fondamentali. Sottomarini trasformati da immersioni in navi veramente subacquee, autonomia, profondità di immersione, velocità e intervallo
Dal libro. Complessi antistravi nazionali Autore Angel Rostislav Dmitrievich.Sistemi di missili antiaerei Land Anti-Aircraft R-101R -101 (P-102) Experient Anti-Aircraft Controlled Rocket. Dotato di sollievo. Progettato nella seconda metà degli anni '40. In NII-88 basato sul missile anti-aereo del trofeo tedesco "Wasserfal". I test hanno avuto luogo nel 1948. Capo designer - Eugene
Dal libro Auto segrete dell'esercito sovietico Autore Kochnev Evgeniy Dmitrievich.Sea Anti-Aircraft Missile Systems B-753 "Volkhov" M-2. B-753 (13dm) Un complesso missilistico anti-aereo sperimentale M-2 M-2 con un razzo controllato a due fasi equipaggiato con Marshus EDD e Avvio RDTT. Creato sulla base del terreno S-75 SPC. Sviluppatore complesso - CKB
Dall'aviazione del libro nelle guerre locali di Babich V.K.Sistemi missili anti-aereo portatili "Ago" (foto della rivista "Military Parade") "Strela-2" "Strela-2m" "Strela-2" 9k32. 9M32 Complesso missilistico anti-aeromobile 9M32 9K32 con un solido razzo minerario combustibile controllato. Il primo SPC portatile domestico. Progettato
Dal libro. Homemakes elettronici di Kashkarov A. P.Complessi anti-missili A. Sistema B-1000opped (Polygon) di difesa anti-missile "A" con una difesa missilistica in 1000. Il primo sistema domestico pro. È stato schierato presso il Poligono Sarah Shagan. A condizione che la sconfitta di un singolo missile balistico monoblocco di intervallo medio.
Dal libro di metallo secolo Autore Nikolaev Grigory Iyich.Complessi anti-serbatoio della seconda generazione "Fagot" adottati nel 1963, il complesso anti-serbatoio di Maltka rispose principalmente ai requisiti delle truppe e nel futuro si è dimostrato positivamente come un'arma efficace durante le guerre locali. Tuttavia, e
Dal libro Evoluzione dei sistemi anti-sottomarini di navi domestiche di Kazakin Leonid.Sistemi missili anti-serbatoio di Novanies a metà degli anni ottanta, insieme al lavoro sulla modernizzazione dei complessi anti-serbatoi creati in precedenza, diretti principalmente a garantire la possibilità di sconfiggere gli scopi moderni con elevati
Dal libro dell'autoreComplessi mobili missili e artiglieria Il primo launcher del BR-264 per il montaggio sul chassis dell'auto è stato creato nell'impianto di barricata nel settembre del Settembre 1961 e faceva parte del PCC sperimentale 9K71 "Temp" con un solido rubinetto di combustibile 9m71, che è stato sviluppato con
Dal libro dell'autore3. Nella lotta per la sopravvivenza nelle guerre locali, come notato, il tasso di sopravvivenza è stato valutato da esperti stranieri in termini di perdita - il rapporto tra il numero di aeromobili abbattuti al numero di partenze aeronautici disposte. Ad esempio, il livello della perdita di squadrone tattico,
Dal libro dell'autore4.8.2. Tecniche efficaci Nella lotta contro le interferenze nella lotta contro il rumore che attraversa la linea, è meglio combinare filtri RF lineari e soppressitori dei processi transitori nella linea AC. Questo metodo può essere ottenuto da 60 dB interferenze alle frequenze a
Dal libro dell'autoreCapitolo 1. Nella lotta contro la corrosione della scienza dei metalli nel mondo non c'è nulla eterno - tutti sanno questa verità non accompagnata per molto tempo. Ciò che sembra per sempre è incrollabile - montagne, blocchi di granito, continenti interi, - alla fine distrutti, sparsi in polvere, vanno sotto l'acqua, cadono in profondità.
Dal libro dell'autoreI complessi di razzo anti-sottomarino sono già stati menzionati, con la comparsa di sottomarini nucleari negli anni '50, erano necessari nuovi sistemi di armi, in grado di colpire bersagli subacquei su una vasta gamma. Nell'URSS, il lavoro in questa direzione è stato avviato secondo
Nel prossimo futuro, i sottomarini e gli aeromobili anti-sottomarini della marina russa dovranno ottenere i sistemi idroacustici del nuovo tipo. Secondo gli ultimi rapporti, fino alla fine del decennio, il Dipartimento militare intende acquisire un gran numero di mezzi di monitoraggio per la situazione subacquea. Tali acquisti consentiranno di fornire mezzi moderni di rilevamento di molti sottomarini in costruzione o sottomarini modernizzati, aeroplani, ecc.
Alla fine di marzo, un nuovo ordine è stato inserito sul sito ufficiale di approvvigionamento dello Stato dal Ministero della Difesa per quanto riguarda l'ulteriore sviluppo della parte materiale della Marina. Secondo le informazioni di gara pubblicate, il Ministero prevede di acquistare 55 complessi idroacustici (Gak) della famiglia MHK-335EM-03 di "Kryakva" in diverse modifiche. Per l'acquisto di tutti i prodotti richiesti, il dipartimento militare spenderà non più di 194,6 milioni di rubli - in media oltre 5,3 milioni per complessi. I primi complessi come parte dell'ordine futuro devono essere già forniti quest'anno. Il completamento delle consegne è previsto per il 2019.
Schema generale del complesso MGK-335EM-05
Secondo i dati pubblicati, le forze armate intendono acquistare complessi di "Kryakva" di tre modifiche, che consentiranno loro di equipaggiare sottomarini, aeromobili anti-sottomarini e sistemi fissi. Per le forze subacquee, vengono acquistati 16 krykva-a complessi. Lo stesso numero di sistemi dovrebbe ricevere l'aviazione marina. I 23 set della versione KRYAKVA-B saranno acquistati per le stazioni di esplorazione idroacustica.
Le domande per l'offerta sono accettate fino al 17 aprile. Poco dopo, verrà firmato un contratto per la fornitura dei prodotti richiesti, dopo di che inizia la loro produzione. Come accennato, il dipartimento militare vuole ottenere i primi complessi idroacustici dei tipi richiesti quest'anno.
Secondo i rapporti, il complesso idroacustico MGK-335EM-03 "KRYAKVA" è stato creato dalla preoccupazione "OceanPibor" (San Pietroburgo). Questo complesso è destinato all'installazione su veicoli di piccole e medie dimensioni. È possibile installare tutte le apparecchiature necessarie sia durante la costruzione di navi che durante la riparazione e gli aggiornamenti. In quest'ultimo caso, il sistema KRYAKVA è un sostituto per il più vecchio complesso MGK-355MS. Secondo i rapporti, sono state create nuove modifiche progettate per il funzionamento su altri media sulla base del complesso della nave. Di conseguenza, il gas familiare KRYAKVA può essere utilizzato anche da sottomarini, aeroplani e sistemi di intelligence stazionarie.
Indipendentemente dal corriere, i complessi hanno compiti simili e sono il più uniforme possibile. Il loro compito principale è quello di cercare i sottomarini. Il rilevamento degli obiettivi viene eseguito nella modalità attiva utilizzando EcoLocation o in Passive - In questo caso, il proprio rumore è monitorato. Inoltre, è possibile rilevare segnali di altri complessi che operano nella modalità attiva. Inoltre, l'automazione dei "Germanards" è in grado di accompagnare in modo indipendente l'obiettivo e rilasciare i dati alla designazione del target sul controllo dell'arco anti-sottofressione del vettore. È possibile automatizzare la classificazione dell'oggetto rilevato. I complessi MGK-335EM-03 "KRYAKVA" hanno una funzione del legame idroacustico a bassa e alta frequenza. Fornisce inoltre l'uso della comunicazione e dell'identificazione del codice.

Architettura gak mgk-335em-03
Al fine di aumentare le caratteristiche operative, i complessi hanno una serie di caratteristiche e funzioni importanti. Durante il funzionamento del complesso idroacustico, viene effettuato il controllo automatico del livello di interferenza acustica. L'automazione è in grado di prevedere l'intervallo previsto del sistema a seconda delle condizioni correnti. Esistono controlli automatizzati per il funzionamento di tutti i componenti del complesso e traccia il loro stato. L'automazione traccia in modo indipendente il funzionamento degli aggregati e rende la diagnostica. In caso di rilevamento dei problemi in modalità automatica, viene eseguita la loro localizzazione. Esiste una funzione degli operatori di formazione, durante i quali vengono utilizzati obiettivi mimici.
NEL configurazione baseDestinato per l'installazione su navi superficiali, GAK MGK-335EM-03 "KRYAKVA" contiene diversi dispositivi principali nella sua composizione che risolve vari compiti. Il principale e unico mezzo per osservare e rilevare gli obiettivi in \u200b\u200bquesto caso è un'antenna attiva-passiva dall'oblio. È fatto sotto forma di un corpo cilindrico dotato di un gran numero di elementi sensibili. Per preservare la posizione dell'antenna desiderata durante il funzionamento, viene utilizzato un sistema di sospensione speciale con dispositivi di stabilizzazione. L'antenna ha un'altezza di 1 m e un diametro di 1 m. Il cerchio del cilindro si trova a 36 pilastri con 12 elementi su ciascuno.
Anche a bordo della nave portante, il dispositivo del generatore, il dispositivo di ricezione e l'amplificazione e il dispositivo di abbinamento, nonché i dispositivi di elaborazione del segnale digitale e i dispositivi di controllo e controllo di controllo e di controllo di stabilizzazione sono montati. Tutti questi elementi del complesso sono interconnessi. L'offerta di energia elettrica a tutti i componenti del complesso viene eseguita con l'aiuto di un dispositivo di alimentazione separato collegato ai sistemi elettrici generali di quadro.
Nel posto di lavoro del complesso operatore, si propone di montare un telecomando con tutti i controlli necessari. I dati sulla situazione subacquea, scopi rilevati e il funzionamento dei fondi idroacustici vengono visualizzati in due monitor di colori. I principali corpi di controllo sono la tastiera e la trackball posizionati sulla console anteriore. Parte dei pulsanti e degli interruttori sono posizionati accanto ai monitor. Si propone anche lo sviluppatore del sistema KRYAKVA per utilizzare un indicatore remoto. A una certa distanza dalla console principale, è possibile installare un monitor aggiuntivo che visualizza le informazioni sull'impostazione corrente.

Antenna plugal "Mallard"
Secondo i rapporti, la famiglia KRYAKVA comprende complessi idroacustici di diversi modelli, diversi dall'altro con la composizione di attrezzature speciali, principalmente antenne e altri mezzi di rilevamento. Pertanto, nel progetto MGK-335EM-01, l'antenna Podloile è completata da un'antenna estesa flessibile trainata. Il complesso MGK-335EM-02 ha un'estensione emessa e flessibile estensione toccata e flessibile. Il prodotto MGK-335EM-04 è caratterizzato da un intervallo di frequenza esteso quando si opera in modalità attiva, che consente il rilevamento di siluri e le versioni "Mallard" di MGK-335EM-05 ha abbassato la ricezione ed emettono antenne.
Secondo i dati ufficiali della preoccupazione "OceanPibor", MGK-335EM-03 Gak "Kryakva" è in grado di rilevare un sottomarino con un raggio equivalente di RE \u003d 10 m a distanze fino a 10-12 km. Le coordinate obiettivo sono determinate con una precisione di 30 'su un cuscinetto. La precisione della distanza raggiunge l'1% della distanza della distanza. Nella modalità di depleting rumore, il complesso è in grado di catturare i suoni con una frequenza da 1,5 a 7 kHz. Dopo aver rilevato lo scopo e portarlo all'accompagnamento, l'accuratezza della definizione del cuscinetto è di 30 '. La modalità di rilevamento dei segnali idroacustici, che implica il rilevamento del gas attivo che funziona in modalità attiva, consente di controllare l'intervallo di frequenza di 1,5-7 kHz. Il cuscinetto sulla fonte del segnale rilevato è determinato con una precisione fino a 10 °.
Analizzando la natura dei segnali riflessi o intercettati ricevuti, il complesso MGK-335EM-03 è in grado di determinare l'appartenenza dell'oggetto rilevato a una o un'altra classe di tecnologia. Con un aiuto dell'operatore, il complesso idroacustico è in grado di distinguere un sottomarino dal siluro. Allo stesso tempo, è possibile emettere simultaneamente una designazione del bersaglio ai sistemi di armi anti-sottocompleti.
Il complesso KRYAKVA è caratterizzato da una caratteristica abbastanza elevata della comunicazione idroacustica, e ha anche alcune caratteristiche speciali. La comunicazione a bassa frequenza o ad alta frequenza viene eseguita nell'intervallo fino a 20 km. Comunicazione del codice, identificazione di un oggetto rilevato o un cambiamento di distanza può essere eseguito a distanze fino a 30 km. Con MHK-335EM-03 GAK, l'equipaggio della nave da trasporto può supportare comunicazione telefonica Entrambi con sottomarini russi e navi che utilizzano la gamma di frequenze della NATO.

Complesso del pannello di controllo
Secondo l'ultimo, nel 2017-19, la Marina dovrà ricevere 55 kit della famiglia MHK-335EM-03 di "Kryakva" in diverse configurazioniDestinato per l'installazione sui media di varie classi. La maggior parte di questa apparecchiatura è prevista per essere installata nelle stazioni di esplorazione idroacouata, mentre altri complessi saranno utilizzati da sottomarini e aerei. Informazioni accurate sui futuri portatori di complessi ordinati, per ovvi motivi, questo momento Non mancano. Mentre rimane solo per costruire previsioni e cercare di prevedere esattamente quale tecnica sarà dotata di tali apparecchiature.
Nel caso di aviazione anti-sottomarina, il-38 e il TU-142 delle ultime modifiche possono essere considerati possibili portatori. Ora questa tecnica è riparata e modernizzazione, durante la quale riceve varie nuove attrezzature. I prossimi aggiornamenti del progetto possono anche utilizzare gli ultimi sistemi idroacustici.
16 complessi nella configurazione per i sottomarini saranno acquistati. Probabilmente, questa attrezzatura sarà utilizzata nella riparazione futura delle navi esistenti di progetti relativamente vecchi. Data l'età e l'equipaggiamento dei sottomarini costituiti da sottomarini, si può presumere che eventuali sottomarini atomici e diesel nazionali di tutti i progetti esistenti possano diventare potenziali portatori di sistemi "Kryakva". Non tutte le navi delle forze sottomarine russe sono dotate di mezzi moderni di osservazione della situazione subacquea, motivo per cui i nuovi prodotti simili hanno bisogno. Come riparato, saranno in grado di ricevere nuovi dispositivi con caratteristiche elevate.
È curioso che nelle condizioni dell'apparenza attuale non vi è alcun punto per l'acquisto di complessi idroacustici destinati all'installazione su navi superficiali. Il prodotto MGK-335EM-03 è stato inizialmente progettato con precisione come una nave di osservazione e solo quindi sviluppata, come risultato della quale è stato possibile installare su altri vettori. Secondo alcuni motivi non interamente comprensibili nei piani più vicini del dipartimento militare, l'acquisto della Gas Guck della nave di Kryakva.

Schema del complesso della nave MGK-335EM-05 con un'antenna inferiore aggiuntiva
Secondo i media domestici, è già noto dove andranno i complessi idroacustici acquistati. Il ministero della difesa dei prodotti risultante distribuisce tra diversi composti della navica e aviazione marina responsabile dell'attuazione della difesa di Antotheine. L'attrezzatura andrà a Kronstadt, Severomorsk e Novorossiysk, così come su alcune basi del territorio Primorsky. Altri dettagli del futuro funzionamento dei sistemi promettenti non sono ancora comunicati.
Dai dati disponibili che ne consegue che l'apparecchiatura di sottomarini, aeroplani e sistemi idroacustici stazionari con nuovi complessi della famiglia MGK-335EM-03 di "Kryakva" avrà conseguenze positive per l'intera difesa anti-sottomarina della flotta nel suo complesso. Durante la costruzione o la modernizzazione di sottomarini, aeromobili, ecc. Riceverà attrezzature moderne per il monitoraggio degli oggetti sottomarini, che appariranno di conseguenza sull'efficienza del loro lavoro. Di conseguenza, la gamma e la probabilità di rilevare oggetti potenzialmente pericolosi aumentano notevolmente.
Oltre alle attività principali associate al rilevamento e alla manutenzione di vari oggetti, il nuovo gas può essere utilizzato per identificare gli scopi trovati, emettere sistemi di gestione targeting, ecc. Previsto anche il regime di allenamento che facilita la preparazione degli operatori idroacustici.
Secondo i dati ufficiali, a metà aprile, il Dipartimento militare completerà l'accettazione delle domande per la gara di recente lanciata e iniziare a scegliere il fornitore dell'attrezzatura richiesta. Presto dovrebbe esserci un accordo per la fornitura, dopo di che inizierà il problema seriale delle modifiche richieste Gak. I primi campioni di tali apparecchiature sono già pianificati nell'anno in corso, quest'ultimo - non oltre la fine del 2019. Ovviamente, la fornitura di tali prodotti sarà effettuata simultaneamente con la costruzione / modernizzazione dei loro vettori. Ciò significa che non oltre l'inizio del prossimo decennio, la difesa anti-sottomarino domestica riceverà nuove attrezzature e con esso nuove opportunità. Tutto ciò influenzerà positivamente il potenziale della Marina in generale.
Secondo i materiali dei siti:
http://zakupki.gov.ru/
http://i-mash.ru/
http://oceanpribor.ru/
http://armsdata.net/
http://flot.com/
L'invenzione riguarda il campo dell'idroacostica e può essere utilizzata come armamento idroacustico dei sottomarini di vari scopi, nonché durante le opere e la ricerca geologiche e idroacustiche sottomarine.
I complessi idroacustici (gas) sono la base del supporto informativo dei sottomarini. Il gas tipico include i seguenti percorsi (stazioni idroacustiche) e sistemi:
Noisalessness (SP), solisi, principalmente i compiti di rilevare sottomarini e navi superficiali;
IDROLEZIONI (CH), operando nella modalità attiva del rilevamento del bersaglio subacqueo ad alta distanza;
Rilevazione dei segnali idroacustici (OGS) progettati per rilevare quelli che operano in vari intervalli di idrolizzatori;
Suono e identificazione;
Minisstands (MI), che si esibisce allo stesso tempo le caratteristiche di rilevamento degli ostacoli vicino al sottomarino;
Centrale sistema di calcolo (Ccc);
Visualizzazione, registrazione, documentazione e sistema di gestione (SORPP).
La composizione di ciascun percorso include antenne acustiche. I dispositivi del generatore sono collegati alle antenne radianti e con ricezione di dispositivi di pre-elaborazione.
Il sottomarino GSU 90 è noto, sviluppato da STN Atlas Electronic (Germania), contenente HP, CP, OGS, comunicazione e MI, e CVS, SORG e un pneumatico totale.
I segni, comune con il gas rivendicato, sono tutti componenti elencati di questo analogico.
Le ragioni che impediscono il conseguimento in questo analogo del risultato tecnico raggiunto nell'invenzione sono un livello relativamente alto di interferenze idrodinamiche e il rumore della barca e la mancanza della possibilità di lavoro indipendente e simultaneamente dei gestori e della comunicazione e dell'identificazione del suono , così come una gamma di frequenza relativamente stretta di segnali collegati.
Da queste carenze, il gas è gratuito, protetto dal certificato della Federazione russa n. 20388 per un modello di utilità, IPC G01s 3/80, 15/00 del 2001. Questo analogico contiene tutte le componenti del primo analogo, tuttavia, il Antenna a banda larga non direzionale emessa e viene inoltre introdotta nel suo percorso di distribuzione e identificazione. Il dispositivo del generatore e nel tratto OGS - antenne ad alta frequenza e banda larga e un dispositivo pre-trattamento, mentre tutte le antenne acustiche sono collocate nella carenatura del naso o nella recinzione del taglio.
Tutti i componenti di questo analogico, così come i componenti del primo analogico, sono inclusi nella composizione del gas proposto.
Le ragioni che impediscono il conseguimento in questo analogo del risultato tecnico raggiunto invenzione sono le seguenti:
Una panoramica limitata dell'antenna principale del tratto HP, a causa dell'oscurità degli angoli dell'alimentazione con il caso;
Le dimensioni limitate dell'antenna nasale principale non consentono di localizzare le fonti di segnali, la gamma di frequenze di cui è inferiore a 0,8-1,0 kHz;
L'unica antenna emettante del percorso della mano ha un settore limitato e relativamente ristretto di irradiazione dello spazio nel compartimento del naso;
L'antenna emettante nasale del percorso di comunicazione e l'identificazione è ombreggiata dal corpo, che elimina il collegamento con i corrispondenti nel settore degli angoli dei mangimi;
La ricezione dei segnali del tratto OGS su un'antenna con una caratteristica multi-trattamento della direzione (XN) impedisce il design della carenatura nasale;
L'antenna focalizzata ad alta frequenza del percorso OGS sfumato il design del recinto del recinto.
Il più vicino nell'essenza tecnica al reclamo (prototipo) è un gas sottomarino, protetto dal brevetto della Federazione russa n. 24736 per un modello di utilità, cl. G01S 15/00, 2002. Contiene i percorsi del PR principale e della SP, il tratto OGS, il tratto HL, il tratto di comunicazione e identificazione, il percorso del ministero e il rilevamento degli ostacoli di navigazione (MI), CVS, Sorg e una gomma totale.
Il principale tratto SP contiene l'antenna della ricezione nasale principale, realizzata con la possibilità di formare caratteristiche di federazione statica in aerei orizzontali e verticali e il primo dispositivo di pretrattamento posto nella capsula all'interno dell'antenna.
Il tratto di Ulteriori SP contiene un'antenna rimasta estesa flessibile (GPBA), cavo cavo, un dispositivo di collezione corrente e un dispositivo di pre-elaborazione.
Il percorso OGS contiene tre antenne di ricezione e dispositivo di pre-elaborazione. La prima antenna è posta nella parte nasale del recinto del taglio e ha un multipath xn. La seconda antenna è posta nella parte del feed della recinzione del taglio ed è omnidirezionale e ad alta frequenza. La terza antenna è a banda larga e i suoi blocchi sono collocati nella carena nasale, nella parte severa del recinto del taglio e sui lati del sottomarino.
Il percorso dell'idrolezione contiene un'antenna di emissione di macellazione, posizionata nella parte del naso del recinto del taglio, due antenne emette a bordo, situate su entrambi i lati del sottomarino, e sul dispositivo del generatore.
Il percorso di comunicazione e l'identificazione contiene un'antenna ad emissione nasale, posizionata in un naso-usura, alimentazione antenna radiante, posizionata nella recinzione del taglio e del dispositivo del generatore.
Il tratto contiene un'antenna di trasmissione ricevente, realizzata con la possibilità di rotazione dell'HN nel piano verticale e nel dispositivo di generazione, l'interruttore "ricezione" e il dispositivo di pre-elaborazione.
L'apparecchio Sorf è realizzato in rimove a doppio slittamento con dispositivi periferici collegati. Ingressi e uscite è collegato direttamente al CVS.
Attraverso il pneumatico totale, i dispositivi del generatore e i dispositivi di pre-elaborazione di tutti i percorsi sono collegati al CVC e al conorto.
Segni, comuni con i segni del gas proposto, sono tutti componenti elencati del complesso prototipo e la relazione tra di loro.
La ragione per cui il conseguimento del risultato tecnico raggiunto nel complesso prototipo raggiunto nell'invenzione è un segreto relativamente basso del complesso.
Un altro motivo che impedisce il risultato del risultato indicato è una gamma insufficiente di bersagli subacquei in modalità HL.
Entrambi questi motivi sono dovuti al fatto che le antenne del percorso HL emettono simultaneamente un segnale in quasi tutte le direzioni, anche se il segnale stesso e il polso. Il fatto è che tutte e tre le antenne del percorso CL hanno un XN abbastanza ampio per bloccare il settore del lavoro, ad eccezione degli angoli dei mangimi. Ciò consente di rilevare la radiazione da quasi qualsiasi parte, che aumenta significativamente la probabilità di rilevamento sottomarino. D'altra parte, una grande larghezza del HN dell'antenna conduce a una diminuzione del suo coefficiente di guadagno, e quindi la potenza del segnale emesso, il che significa la portata al bersaglio su cui questo potere sarà sufficiente per il suo rilevamento sicuro .
L'attività tecnica, sulla soluzione di cui l'invenzione è diretta, è aumentare la larghezza del funzionamento del gas e l'intervallo di rilevamento degli obiettivi in \u200b\u200bmodalità HL.
Il risultato tecnico è ottenuto dal fatto che nel GA conosciuto, tutte le antenne radianti del tratto HL vengono rese controllate elettronicamente sia dal numero di raggi Xn sia dalla loro larghezza e della direzione, mentre gli ingressi di controllo di queste antenne sono collegati attraverso il totale BUS collegato al CSW e al Sorg, il numero di raggi XN ciascuno dalle antenne per unità, più del numero di accompagnati questi obiettivi dell'antenna, e la loro larghezza è minimamente possibile, ma sufficiente per la cattura e la manutenzione sicura del bersaglio, mentre uno Dei raggi HN ha una larghezza sufficiente per catturare l'obiettivo di Escort e scansiona l'angolo nelle antenne del settore di responsabilità specificate, e i restanti raggi delle antenne HN accompagnano il target rilevato rilevato.
Per raggiungere un risultato tecnico nel gak contenente il percorso della Principale SP, il tratto di SP ULTER, il percorso OGS, il percorso HL, il tratto della comunicazione e l'identificazione, il percorso di MI, CVS, SORF e il totalney, mentre L'apparecchiatura è soddisfatta con le rimove dual-slip con dispositivi periferici collegati e delimitati con CV, il percorso HP principale contiene l'antenna della ricezione nasale principale, realizzata con la possibilità di formare una federa statica in aerei orizzontali e verticali e il primo dispositivo di pre-elaborazione , posizionato nella capsula all'interno dell'antenna e collegata direttamente all'uscita dell'antenna, e l'uscita - attraverso il pneumatico totale con CV e Sorg, il percorso OGS contiene la prima antenna posizionata nella parte del naso del recinto del taglio e di avere a HN multi-trattamento, la seconda antenna, posata nella parte del feed della recinzione del taglio ed è un'antenna ad alta frequenza e omnidirezionale, terza antenna, i cui blocchi sono collocati nel naso coerente, nella parte della recinzione del taglio e sui lati La barca a due vie, che è a banda larga e il secondo dispositivo di pre-elaborazione, gli ingressi del segnale sono collegati direttamente alle uscite delle antenne appropriate del percorso OGS e dell'ingresso di controllo e dell'output - attraverso un pneumatico totale con CVS E FORSORE, il percorso CL contiene una slammazione dell'antenna emettante nasale posizionata nelle recinzioni di taglio del naso, due antenne radianti di bordo, posizionate su entrambi i lati del sottomarino, e il dispositivo del primo generatore, le cui uscite sono collegate al segnale ingressi delle antenne emette corrispondenti del percorso HL e l'ingresso di controllo - attraverso un pneumatico totale con CVS e SORG, il percorso di comunicazione e l'identificazione contiene una nasale l'antenna irradiante collocata nel Cooper basato sul naso, l'antenna di emissione di alimentazione, collocata Nella recinzione del taglio e nel dispositivo del secondo generatore, le cui uscite sono collegate agli ingressi del segnale delle antenne emette del percorso e dell'identificazione del percorso di comunicazione e dell'ingresso di controllo, attraverso una gomma totale con CV e Sorg, il tratto contiene Antenna di trasmissione ricevente eseguita Uh con la possibilità di rotazione dell'HN nel piano verticale e il terzo generatore posto nel naso, il terzo generatore, collegato all'uscita di ingresso dell'antenna del percorso tramite l'interruttore di ricezione e l'ingresso di controllo - attraverso a Pneumatico totale con CVS e SORG, e il terzo dispositivo di pre-elaborazione, il cui ingresso è collegato direttamente all'uscita dell'antenna di trasmissione ricevente e dell'uscita - attraverso la gomma totale con il CCC e il Sorp, il percorso del Sorp, il percorso del Sorp L'SPP aggiuntivo contiene il GPB, attraverso il cavo del cavo e il dispositivo del collegamento corrente collegato al quarto dispositivo di pre-elaborazione collegato alla sua uscita attraverso un pneumatico totale con un ccl e un Sorg, tutte le antenne radianti del percorso di idrolezione sono rese controllate elettronicamente Con il numero di raggi XN e la loro larghezza e direzione, mentre gli ingressi di controllo di queste antenne sono collegati attraverso il bus totale collegato a CSW e Sorrod, il numero di raggi HN ciascuno di ciascuna antenna per unità è maggiore del numero di accompagnati da questo antenna, e la loro larghezza è minimamente possibile, ma È accurato per la cattura e la manutenzione sicura del bersaglio, mentre uno dei raggi dell'XN ha una larghezza sufficiente per catturare l'obiettivo di Escort e scansisce un'antenna nel settore di responsabilità civiletato dell'antenna, e i restanti raggi dell'HN Accompagnamento gli obiettivi rilevati rilevati.
Gli studi del Gak rivendicato su brevetti e letteratura scientifica e tecnica hanno mostrato che l'insieme di caratteristiche di recente introduzione delle antenne del tratto HL e dei nuovi collegamenti insieme al resto degli elementi e dei collegamenti del complesso non sono suscettibili di auto-classificazione . Allo stesso tempo, non dovrebbe essere esplicitamente dalla tecnica nota. Pertanto, il gas proposto dovrebbe essere considerato soddisfacente il criterio "novità" e avere un livello inventivo.
L'invenzione è illustrata dal disegno, su cui la figura 1 presenta il diagramma strutturale del gas proposto.
Il complesso include percorsi del PR principale e della SP, il tratto HL, il percorso OGS, il tratto di comunicazione e identificazione, percorso di MI, CSS e Sorg e una gomma totale.
Il percorso SP principale contiene la principale antenna di ricezione nasale 1 e il dispositivo di pre-elaborazione 2, collegato sequenzialmente all'antenna 1. Il dispositivo 2 è posizionato in una capsula ermetica all'interno dell'antenna 1 (il composto antenna 1 con il dispositivo 2 è mostrato in Fig. 1 freccia tratteggiata). L'antenna 1 e il dispositivo 2 sono multicanale e consistono in canali n × m, dove n è la quantità di xn (canali spaziali) nel piano orizzontale, una m è la quantità di xn (canali spaziali) nel piano verticale. Attraverso il BUS totale 3 del complesso, il principale dispositivo SP TRACT 2 è associato a CVS 4 e SORG 5.
Il tratto di una SP addizionale (a bassa frequenza) SP contiene GPB 6, tramite cavo-cavo 7 e un dispositivo di collezione corrente (in fig. 1 non è mostrato) collegato al dispositivo pretrattativo 8. Attraverso il bus totale 3 del complesso, il dispositivo 8 del percorso dell'Ulteriori SPP è associato al CVS 4 e SORG 5.
Il tratto HL contiene un'antenna ad emissione di naso vagabondaggio 9, due antenne radianti a bordo 10 e 11 e il dispositivo generatore 12. L'antenna 9 è collocata nella recinzione del taglio 13 e dell'antenna 10 e 11 - su entrambi i lati del sottomarino. Antenne 9, 10 e 11 sono gestibili elettronicamente. I loro ingressi del segnale sono collegati direttamente alle output corrispondenti del dispositivo 12 e gli ingressi di controllo - attraverso il bus totale 3 del complesso con CVS 4, nonché l'ingresso di controllo del dispositivo 12.
Il percorso OGS contiene antenne 14, 15, 16 e un dispositivo di pre-elaborazione 17. L'antenna 14 ha un multipath xn e si trova nella parte nasale del recinto del taglio. L'antenna 15 si trova nella parte del feed della recinzione del taglio ed è omnidirezionale e ad alta frequenza. L'antenna 16 è la banda larga e i suoi blocchi 16.1, 16.2, 16,3 e 16.4 sono collocati nel morsetto del naso 18, sui lati e nella parte del feed della recinzione del recinto 13. Le uscite delle antenne 14, 15 e 16 sono collegate direttamente Agli ingressi corrispondenti del dispositivo 17 collegato con la sua uscita attraverso un pneumatico totale di 3 complessi con CVS 4 e Sorcha 5.
Percorso di comunicazione e identificazione contiene un'antenna radiante nasale 19, l'antenna di emissione di alimentazione 20 e il dispositivo del generatore 21. L'ingresso di controllo del generatore 21 attraverso il bus totale 3 del complesso è collegato al CVS 4 e la prima e la seconda uscita sono direttamente con le antenne e 20 ingressi, rispettivamente.
Il tratto contiene un'antenna di trasmissione ricevente 22, il dispositivo generatore 23, l'interruttore di ricezione (non mostrato) e il dispositivo di pre-elaborazione 24. L'antenna 22 è posizionata nella carena nasale 18 ed è configurata per ruotare l'HN nel piano verticale, la sua uscita di ingresso tramite l'interruttore di ricezione è collegato all'uscita del dispositivo 23 e l'ingresso del dispositivo 24. L'ingresso di controllo di Il dispositivo 23 e l'output del dispositivo 24 attraverso il complesso totale del pneumatico 3 collegato a CVS 4 e SORG 5.
Oltre al pneumatico totale, 3 complessi tra il CVS 4 e Sorud 5 contengono un numero di connessioni dirette.
CCS 4 è una combinazione di processori universali e processori speciali e ha la struttura del computer di controllo.
Ordina 5 Consiste di due console, ognuna delle quali ha due display nella sua composizione, controlli (tastiera, pulsanti, prese). La struttura delle console è simile alla struttura di un personal computer. I dispositivi periferici tipici sono collegati alle porte delle console: telefono, altoparlante, stampante, registratore, registratore magnetico e ottico.
Il lavoro del gas proposto viene effettuato come segue.
Le antenne riceventi 1, 6, 14, 15 e 16 svolgono la trasformazione delle oscillazioni elettriche (acustiche) in meccanico. L'antenna 22 è reversibile.
Nel tratto HL, la ricezione ECHO viene eseguita dall'antenna 1. Nel percorso di comunicazione e l'identificazione della ricezione dei segnali di comunicazione e dei segnali di eco eseguono anche l'antenna 1.
Nei dispositivi generatori 12, 21 e 23, un segnale di impulso della potenza richiesta è formato per la successiva amplificazione e radiazione come un segnale di suono con antenne 9, 10 e 11 del percorso della mano, antenne 19 e 20 del percorso di comunicazione e identificazione e antenna 23 tratto. I segnali di controllo dei parametri dei segnali generati sono formati per ordinare 5 e il CCS 4.
I dispositivi 2, 8, 17 e 24 di pretrattamento sono segnali ricevuti pre-elaborazione, cioè la loro amplificazione, filtraggio, elaborazione di frequenza e conversione dalla vista analogica in Digital.
CCS 4 e SORG 5 sono sistemi coinvolti nel lavoro di tutti i percorsi HAC. Lavorano con i dati digitali. La base del lavoro di questi sistemi è gli algoritmi di elaborazione delle informazioni implementati dal software. Questi fondi sono effettuati:
La formazione completa dei parametri del segnale di impulso, che quindi nei dispositivi del generatore è formata e amplificata per alimentazione;
La formazione dell'HN delle antenne controllate del tratto HL, tenendo conto della necessità di scansionare i loro raggi;
Elaborazione secondaria delle informazioni che rilevano la struttura del segnale fine;
Prendere una decisione sul rilevamento dell'obiettivo;
Obiettivo di supporto automatico.
Il funzionamento del gas è gestito da operatori posizionati dietro le console. Ordina 5. La modalità principale del funzionamento è la reception, con la SP, le SP, OGS, la comunicazione. I percorsi HL e MI, così come la modalità "lavoro attivo" del percorso di comunicazione, sono inclusi nella radiazione sui comandi dal SORPP. 5. I canali riceventi funzionano simultaneamente e indipendentemente l'uno dall'altro. I segnali ricevuti tramite antenne 1, 14, 15, 16, 6 Immettere i dispositivi 2, 8, 17, 24, sono basati su intervalli di frequenza, viene eseguita la loro elaborazione di frequenza. Inoltre, i segnali ricevuti ed elaborati attraverso il Bus Total 3 sono iscritti al CCC 4, in cui il software sulla base degli algoritmi prelevati negli algoritmi del gas ha prodotto l'elaborazione del segnale secondaria. Gli elementi del movimento e delle coordinate degli obiettivi sono determinati, i dati ottenuti dallo stesso obiettivo di vari percorsi sono generalizzati. L'operatore decide sull'assegnazione degli obiettivi per il supporto automatico e trasmette il comando appropriato.
Se è presente un comando dell'operatore appropriato da Sorud 5 sull'inclusione delle principali modalità attiva, questo comando entra nel CSW 4 e elaborato. Un comando completo contenente codici di parametri della modalità radiazione è prodotto in CVS 4. Secondo il pneumatico totale 3, questo comando viene trasmesso al dispositivo generatore 12 (21, 23), in cui viene generata la formazione di un potente segnale di impulso della radiazione fornita all'antenna 9, 10, 11 (19, 20.22).
Durante il funzionamento del telefono nella modalità attiva, a causa del controllo elettronico delle antenne in ciascuna delle antenne 9, 10 e 11, uno dei raggi del suo HN ha una larghezza sufficiente per una cattura sicura dell'obiettivo alla scorta e scansiona l'angolo nel settore specificato del lavoro di questa antenna. Nel caso della presenza in questo settore, questi ultimi vengono rilevati dal raggio di scansione e vengono trasmessi a supporto. Allo stesso tempo, la scansione del raggio "Search" non è interrotto, ma è formata un ulteriore fascio di HN, orientato verso il bersaglio appena scoperto. Questo raggio è accompagnato dallo obiettivo appena scoperto. La sua larghezza dipende dall'intervallo al bersaglio, alle sue dimensioni e alla velocità del movimento nella direzione perpendicolare alla direzione "sottomarino - target". Questa larghezza è stata definita praticamente. Dovrebbe essere il minimo possibile, ma sufficiente per accompagnamento sicuro dell'obiettivo. Con l'avvento di ogni nuovo obiettivo nella nuova direzione, il processo descritto viene ripetuto e si forma un altro HN dell'antenna, che è stabilito sul mantenimento di questo scopo. Questo processo verrà ripetuto fino a quando tutti gli obiettivi che si trovano nell'area di responsabilità dell'antenna non saranno accompagnati dai raggi corrispondenti dell'antenna HN.
Pertanto, durante il funzionamento del percorso della mano, la radiazione del segnale di sondaggio viene eseguita da diversi raggi stretti (il numero di raggi per unità supera il numero di scopi, e se gli scopi sono in una direzione, è ancora inferiore) . Questo complesso proposto differisce significativamente dal prototipo, in cui il controllo delle antenne del GL tratto. Nella linea della mano del prototipo, la larghezza della HN di ciascuna delle antenne dovrebbe essere almeno la larghezza del settore della responsabilità dell'antenna, altrimenti in termini di questo settore, l'obiettivo non può essere rilevato affatto.
Nel prototipo in modalità HL, la radiazione del segnale di sondaggio viene eseguita continuamente durante il settore della responsabilità delle antenne, quindi questa radiazione può essere rilevata da qualsiasi direzione. Nel gak proposto nella maggior parte del settore esplorativo, la radiazione è mancante o eseguita con grandi interruzioni. Ciò riduce significativamente la probabilità di rilevamento delle radiazioni e determinando le coordinate della sua origine quando si utilizza il gas proposto rispetto al prototipo.
Inoltre, il raggio "Search" nel gas proposto ha un GN piuttosto stretto, che consente di focalizzare tutta l'energia del dispositivo generatore nel settore ristretto, in cui esiste un obiettivo irradiato, che è equivalente ad un aumento di La potenza del bersaglio del segnale rispetto al prototipo, in cui la larghezza dell'antenna è grande e la maggior parte dell'energia emessa passa dall'obiettivo irradiato.
Un aumento della potenza del destinatario del segnale porta ad un aumento del suo intervallo di rilevamento.
Pertanto, il divario proposto fornisce un aumento della sicurezza del complesso e dell'intervallo di rilevamento del target nella modalità camino rispetto al prototipo.
Il gas inventivo è abbastanza facile da implementare. Le antenne del tratto GL possono essere implementate in conformità con le raccomandazioni fornite nel libro [L.K. Samolov. Controllo elettronico delle caratteristiche di orientamento delle antenne. - l.: Labuilding navale. - 1987]. I dispositivi rimanenti possono essere eseguiti come dispositivi prototipo corrispondenti.
Il complesso idroacostico del sottomarino contenente il percorso della principale riunito, il percorso di ulteriore disgraziatezza, il percorso di rilevamento dei segnali idroacustici, il percorso di idrolizia, il tratto di comunicazione e identificazione, il percorso del ministero e il rilevamento degli ostacoli di navigazione, Il sistema di calcolo centrale, il display, la registrazione, la documentazione e il sistema di controllo, e il pneumatico totale, in questo caso, l'apparecchiatura del sistema di visualizzazione, la registrazione, la documentazione e il controllo è costituita da rimove a due dimensioni con dispositivi periferici collegati ed è collegato Al sistema di elaborazione centrale, il percorso principale di rilevamento del rumore contiene l'antenna della ricezione nasale principale, configurata per formare una caratteristica di messa a fuoco statica in piani orizzontali e verticali e il primo dispositivo di pre-elaborazione posizionato nella capsula all'interno dell'antenna e collegata direttamente al Uscita dell'antenna e dell'uscita - attraverso la gomma totale con il centro Sistema di elaborazione Allen e sistema di visualizzazione, registrazione, documentazione e controllo, il percorso di rilevamento dei segnali idroacustici contiene la prima antenna posta nella parte nasale del recinto del taglio e con una caratteristica multi-trattamento dell'orientamento, la seconda antenna posta Nella parte del feed della recinzione del taglio ed è una terza antenna ad alta frequenza e omnidirezionale, la terza antenna i cui blocchi sono collocati nella coordinata del naso, nella parte del nucleo della recinzione del taglio e sui lati del sottomarino, che è a banda larga, e il secondo dispositivo di pre-elaborazione, gli ingressi del segnale sono collegati direttamente alle uscite delle antenne corrispondenti del percorso di rilevamento dei segnali idroacustici e dell'ingresso di controllo e dell'output - attraverso il totale del pneumatico con il sistema di calcolo centrale e Il sistema di visualizzazione, registrazione, documentazione e sistema di controllo, il percorso di idrolezione contiene un'antenna di emissione nasale slave, posizionata nella parte del naso della recinzione del taglio, due emissione a bordo Antenne collocate su entrambe le schede del sottomarino e sul dispositivo del primo generatore, le cui uscite sono collegate agli ingressi del segnale delle antenne radianti corrispondenti del percorso di idrolicazione e dell'ingresso di controllo - attraverso il bus totale con il sistema di calcolo centrale e Il sistema di visualizzazione, la registrazione, la documentazione e la gestione, il percorso di comunicazione e l'identificazione contiene un'antenna radiante nasale posizionata in un coordinatore del naso, un'antenna di radiazione di alimentazione, posta nella recinzione del taglio, e il dispositivo del secondo generatore, le quali sono Collegato agli ingressi del segnale delle antenne emettendo del percorso di comunicazione e dell'identificazione e dell'ingresso di controllo, attraverso un pneumatico totale con il sistema di calcolo centrale e il sistema di visualizzazione, registrazione, documentazione e gestione, il percorso del ministero e il rilevamento degli ostacoli di navigazione contiene un'antenna a ricetrasmettitore, realizzata con la possibilità di rotazione delle caratteristiche di orientamento nel piano verticale e collocata nella carena nasale, il terzo generatore Dispositivo di apertura, il cui output è collegato all'uscita di ingresso dell'antenna del percorso del ministano e il rilevamento degli ostacoli di navigazione tramite l'interruttore "Ricezione - trasmissione" e l'ingresso di controllo - attraverso il bus totale con il sistema di elaborazione centrale e il sistema di visualizzazione, la registrazione, la documentazione e il controllo e il terzo elaborazione del dispositivo preliminare, l'input dei quali è collegato direttamente all'uscita dell'antenna del ricetrasmettitore e l'uscita avviene tramite un bus totale con un sistema di elaborazione centrale e il sistema di visualizzazione , registrazione, documentazione e controllo, il percorso di ulteriore rilevamento del rumore contiene un'antenna rimasta estesa flessibile, attraverso il cavo del cavo e il dispositivo di collezione corrente collegato all'ingresso il quarto dispositivo di pre-elaborazione collegato dalla sua uscita attraverso una gomma totale con a Sistema di calcolo centrale e sistema di visualizzazione, registrazione, documentazione e controllo, caratterizzato dal fatto che tutte le antenne radianti del percorso di idrolezione sono fatte ONG controllata sia dal numero di caratteristiche dei raggi delle caratteristiche di orientamento e dalla loro larghezza e della loro direzione, mentre gli ingressi di controllo di queste antenne tramite il bus totale sono collegati al sistema di calcolo centrale e al sistema di visualizzazione, registrazione, documentazione e controllo, il numero di raggi delle caratteristiche di riferimento di ciascuna delle antenne per unità più del numero di accompagnati da questo gol antenna, e la loro larghezza è minimamente possibile, ma sufficiente per la cattura e l'accompagnamento sicuro del bersaglio, mentre uno dei raggi dell'orientamento Le caratteristiche hanno una larghezza sufficiente per catturare l'obiettivo di Escort e scansiona l'angolo nel settore della responsabilità della antenna specificata, e i restanti raggi delle caratteristiche di orientamento dell'antenna sono accompagnati da questo obiettivo dell'antenna.
Brevetti simili:
L'invenzione riguarda le stazioni del suono-bevande (complessi prodotti sani) e può essere utilizzato per determinare la rimozione della sorgente audio (da) da un localizzatore acustico, il suo angolo di produzione del suono corretto e coordinate topografiche (TC) di questo.
Dispositivo per rilevare i segnali e determinare la direzione alla loro fonte. Il risultato tecnico dell'invenzione è quello di creare un nuovo dispositivo per rilevare i segnali e determinare la direzione alla loro sorgente (fonti) con il numero di operazioni non lineari nel percorso di lavorazione, pari a 2.
L'invenzione riguarda il campo dell'idroacustica. Entità: nel metodo di determinare la direzione del faro idroacostico, il convenuto in condizioni di propagazione multipath del segnale di navigazione determinano la direzione simultaneamente nei piani orizzontali e verticali al rispondente della perdita idroacustica ricevendo l'array dell'antenna Beacon-Rispondente Rinforzo del segnale ricevuto da preamplificatori collegati all'uscita di ciascun reticolo antenna convertitore, digitalizzazione con frequenza del campionamento FS.
L'invenzione riguarda le tecniche di test e può essere utilizzata in prove intrinseche degli oggetti sottomarini. Il risultato tecnico è una diminuzione dell'errore di determinare le coordinate del posizionamento e gli angoli di orientamento dell'oggetto di posizionamento nello spazio del poligono mobile.
L'invenzione riguarda il campo dell'idroacostica e può essere utilizzato in idrolitici passivi, così come in acustica atmosferica e radar passivo. Il risultato tecnico raggiunto è garantire l'osservazione visiva delle sorgenti di radiazioni sulla schermata dell'indicatore, la loro posizione direttamente nelle coordinate desiderate del campo di osservazione "Gamma di direzione" con la determinazione delle loro coordinate sulle scale del campo dell'indicatore al massimo immunità del rumore, Raggiungibile in questo sistema di ricezione e in termini di processo di elaborazione e di elaborazione e aumenti computazionali limitati.
Utilizzo: in radar, comunicazioni radio e radio astronomia. Entità: il rilevatore di correlazione dei segnali contiene un determinato array di dispersione (regalo) realizzato in un certo modo, che include n dei trasduttori elettro-acustici attivi passivi passivi e m, corrispondenti a loro canali canali di trasmissione, un controllo caratteristico di radiazioni Unità, l'unità di calcolo dei relativi elementi di coordinata del regalo, soglia, soluzione di soglia di soglia, indicatore, elementi attivittivi del regalo, nonché di una caratteristica dell'attore di correlazione con un ritardo di segnali.
L'invenzione riguarda il campo dell'idroacustica e può essere utilizzato per rilevare l'oggetto nell'ambiente marino e la misurazione delle coordinate. Il risultato tecnico dell'uso dell'invenzione è di misurare la distanza dall'oggetto di riflessione in un tempo sconosciuto di radiazioni e del luogo di produzione, che aumenta l'efficienza dell'utilizzo degli agenti idroacustici. Per ottenere questo risultato tecnico, un segnale esplosivo viene irradiato nell'ambiente marino, ricevendo il segnale riflesso da un ricevitore a banda larga, un'analisi di frequenza multicanale del segnale riflesso, mapping sull'indicatore degli spettri dall'uscita del canale, produrre un'installazione autonoma e minare La fonte del segnale esplosivo, misurare la dipendenza della velocità del suono dalla profondità, misurata il livello di interferenza nella striscia di ricezione è determinata dalla soglia di rilevamento, riceve un segnale di propagazione del segnale sprippico in avanti, che ha superato la soglia di rilevamento selezionata, determinare il Tempo di ricezione del segnale di propagazione in avanti Dalla fonte esplosiva al ricevitore TPRAM, misurare lo spettro del segnale di propagazione in avanti, che ha superato la soglia di rilevamento, determinare la larghezza dello spettro del segnale di propagazione diretta nella striscia del dispositivo ricevente, il segnale, riflesso dal Oggetto, determinare il tempo di ricezione del segnale taho riflesso, misurare lo spettro del segnale riflesso, determinare la striscia di Spectral Compact Il segnale riflesso di Avid ha superato la soglia di rilevamento Fakho determina la distanza dall'oggetto dalla formula Dorm \u003d K (FPRAM-Fac), dove K è un coefficiente che determina l'attenuazione della frequenza dello spettro del segnale durante la distribuzione, con la Dispensione\u003e (Techo- Tprim) con, dove - velocità del suono. 1 il.
L'invenzione riguarda il campo dell'idroacustica e può essere utilizzata per costruire sistemi per il rilevamento dei segnali di suono di idroliti installati su un corriere mobile. Il risultato tecnico dell'uso dell'invenzione è quello di garantire la possibilità di determinare la modifica nell'angolo di velocità del movimento della sorgente del segnale della sonda, la velocità cambia nella direzione del suo movimento. Per ottenere il risultato tecnico specificato, è stata selezionata una ricezione sequenziale dei segnali di sondaggio della sorgente di spostamento, la determinazione del tempo dell'arrivo del primo segnale di rilevamento ricevuto, caratterizzato da tali nuove operazioni sono state introdotte, vale a dire: i momenti del tempo TI Ricezione di un altro n del segnale di sondaggio, dove n non è inferiore a 3, determinare l'intervallo di tempo TK tra i momenti dell'arrivo di ciascuno due seguendo l'uno dell'altro dei segnali di sondaggio TK \u003d TI + 1-TI, determinare la differenza tra il misurato Intervalli di tempo ΔTM \u003d TK + 1-TK, dove M è il numero di misurazione di intervalli di tempo sequenziale, determinare la differenza degli intervalli di tempo, ricordare la prima differenza di intervallo di tempo, determinare la differenza di intervallo di tempo seguente, se la differenza di intervallo ha un segno negativo , determinare il coseno dell'angolo di movimento del corso della fonte, come rapporto di ciascuna differenza successiva per la prima differenza di intervallo di tempo, determinare i corsi La fonte della fonte dei segnali del suono, come valore, inversa coseno della relazione misurata, se il valore misurato della differenza è positivo, la sorgente dei segnali di sondaggio viene rimossa e il coseno dell'angolo è calcolato come il rapporto tra la prima differenza per ciascuna successiva. 1 z.P. F-Lies, 1 yl.
L'invenzione riguarda il campo dell'idroacostica e può essere utilizzata nei compiti di determinare la classe dell'oggetto durante lo sviluppo di sistemi idroacustici. La classificazione dei segnali idroacustici è proposto l'emissione di rumore dell'oggetto marino, che include il segnale di antenna ricevente dell'emissione del rumore dell'oggetto marino nella miscela additiva con un'interferenza dell'antenna idroacustica, conversione del segnale in una vista digitale, elaborazione spettrale di Segnali ricevuti, Accumulo degli spettri ottenuti, livellando lo spettro per frequenza, determinazione della soglia di rilevamento in base ai falsi allarmi di probabilità e quando la soglia per rilevare lo spettro corrente viene superato a questa frequenza di decisione sulla presenza di un componente discreto, Secondo il quale è classificato l'oggetto marino, in cui i segnali dell'oggetto marino nella miscela additivi con un'interferenza sono presi da due semi-adesivi dell'antenna idroacustica, la lavorazione spettrale dei segnali ricevuti è prodotta presso il semi-semi -tentenene Gli spettri di potenza alle uscite di due semitentteni sono riepilogati, determinando lo spettro di potenza totale s σ 2 (Ω k), trova la differenza s Δ 2 (Ω k k) di spettro elettrico alle uscite di due semi-bypand , determinata differenza S 2 (Ω k) σ - Δ ¯ \u003d s σ 2 (Ω k) ¯ - s Δ 2 (Ω k) ¯ - s Δ 2 (Ω k) ¯ - lo spettro di potenza delle emissioni di rumore dell'oggetto marino e La presenza di componenti discreti è giudicata dalle emissioni di rumorosità della soglia di rilevamento della frequenza dell'oggetto marino. Ciò garantisce l'eliminazione dell'effetto dello spettro di interferenza prelevato dalla caratteristica del campo laterale della direzione dell'antenna idroacustica e della corretta definizione dei segni spettrali di classificazione. 1 il.
L'invenzione riguarda il radar, in particolare ai dispositivi per determinare le coordinate di oggetti che emettono segnali acustici, con l'aiuto di sensori in fibra ottica separati geograficamente - contatori di pressione del suono. Il risultato tecnico è un aumento dell'accuratezza della determinazione della posizione e del riconoscimento del tipo di oggetto stimando la composizione spettrale dei suoi parametri acustici del rumore e del movimento. Il risultato tecnico è ottenuto introducendo un secondo anello per trasmettere impulsi ottici di un'altra lunghezza d'onda e una catena sequenziale di nodi: (2N + 3) -Hay Guida alla luce, la terza FPU, il secondo generatore di impulsi, la seconda fonte di radiazione ottica, ( 2N + 4) -H fibra. 1 il.
L'invenzione riguarda il campo dell'idroacustica e ha lo scopo di determinare i parametri del rumore dei oggetti nel mare. Indagare sul segnale idroacustico del rumore dell'oggetto marino, confrontandolo con un segnale di previsione, formato dinamicamente per la combinazione del presunto rumore dell'oggetto e delle distanze all'oggetto determinando il coefficiente di correlazione. Al massimo, la funzione della dipendenza del coefficiente di correlazione sul rumore previsto dell'oggetto e della distanza stimata dell'oggetto determina congiuntamente la valutazione del rumore dell'oggetto e stimare la distanza dall'oggetto. Il risultato tecnico dell'invenzione è quello di aumentare l'accuratezza della stima del rumore dell'oggetto con una diminuzione simultanea del numero totale di operazioni aritmetiche durante le valutazioni del rumore dell'oggetto e della distanza dall'oggetto. 2 il.
L'invenzione riguarda i ritardati acustici (AP), i localizzatori acustici (AL) e possono essere utilizzati per determinare il cuscinetto della sorgente sonora (da). L'obiettivo dell'invenzione è quello di aumentare la precisione della direzione che si trova dalle superfici della Terra inclinata al piano dell'orizzonte, dove si trova l'antenna acustica e riducendo il tempo per la definizione del cuscinetto di questa fonte. Assayer da B. questo metodo Determinare come segue: misurare la temperatura dell'aria, la velocità del vento, l'angolo direzionale della sua direzione nello strato superficiale dell'atmosfera e presentarli alla macchina di elaborazione elettronica, delineata lungo la mappa topografica. attenzione speciale (Fossa), dove possono essere posizionate posizioni antincendio di artiglieria e mortai, scegliere un'area piatta di circa una forma rettangolare con una lunghezza di almeno trecento metri e una larghezza di almeno dieci metri, che sarebbe approssimativamente perpendicolare a La direzione sul centro approssimativo del fossato, misurare l'angolo di inclinazione di questo il parco giochi al piano dell'orizzonte e, tenendo conto di questo angolo, utilizzando un dispositivo ottico-meccanico e una guida di rangefinder, imposta la SP in uno speciale il modo a terra, accettare segnali acustici e interferenze, trasformularli in segnali elettrici e interferenze, elaborati in 1 e 2 canali di elaborazione segnali AP o AL, determinati all'uscita di questi canali le tensioni costante u1 e U2, che è venuta solo da Il fossato, sottrarre dalla tensione di tensione U1 U2, piegare queste tensioni, la differenza la differenza è ottenuta alla loro somma e automaticamente in base al programma, viene calcolato il vero cuscinetto della sorgente audio α. 8 yl.
L'invenzione riguarda il campo dell'idroacustica e può essere utilizzato nello sviluppo dei sistemi di determinazione delle coordinate in base al percorso della riduzione del rumore dei complessi idroacustici. Il metodo comprende la ricezione di un segnale acustico idroacustico dell'antenna idroacustica, mantenendo il bersaglio in modalità disgraziata, analisi spettrale del segnale di rumore idroacustico in un'ampia banda di frequenza, determinazione della distanza dal bersaglio, viene generata la ricezione del segnale idroacustico del rumore. Dalla metà dell'antenna idroacustica, misurare lo spettro reciproco tra i segnali di rumore idroacustico assunto metà delle antenne idroacustiche; Misurare la funzione di autocorrelazione di questo spettro reciproco (ACF); La frequenza del corriere del fischio della funzione di autocorrelazione è misurata, la differenza tra la frequenza del corriere misurata e la frequenza del supporto di riferimento del segnale di emissione del rumore è l'obiettivo del fetolone misurato a bassa distanza (fetoon-fismo) e la distanza dal L'obiettivo è determinato dalla formula D \u003d (Fetalon-Fism) K, in cui K il coefficiente di proporzionalità calcolato come rapporto di cambiamenti nella frequenza del corriere della funzione di autocorrelazione per distanza dell'unità quando si determina la frequenza di riferimento. 1 il.
Le invenzioni riguardano il campo dell'idroacustica e possono essere utilizzate per controllare il livello di emissione del rumore dell'oggetto subacqueo nell'invenzione del serbatoio. Il risultato tecnico ottenuto dall'introduzione delle invenzioni è quello di ottenere la possibilità di misurare il livello di rumorosità della floutognessione sottomarina direttamente dalla fossilizzazione stessa. Questo risultato tecnico è ottenuto dal fatto che i moduli (s), dotati di idrofoni, aumentano il modulo di misurazione (IM) e il livello di emissione del rumore viene misurato usandolo. È dotato di un sistema per controllare le sue prestazioni senza smantellare il dispositivo. 2N. e 11 z.P. F-LS, 3 YL.
Il dispositivo (100) per risolvere l'ambiguità dalla stima (105) DOA (φ ^ AMB) contiene un analizzatore (110) di stime DOA per analizzare la stima (105) DOA (φ ^ AMB) per ottenere un set (115) di Parametri analisi ambigui (φ ~ i ... φ ~ n; f (φ ~ i) ... f (φ ~ n); fenh, i (φ ^ amb) ... fenh, n (φ ^ amb); GP (φ ~ i). ..gp (φ ~ n); d (φ ~ i) ... d (φ ~ n)) utilizzando informazioni (101) dello spostamento e delle informazioni (101) del Lo spostamento è il rapporto (φ ^ ↔φ) tra gli sfollati (φ ^) e una stima non formata della DOA (φ) e il blocco (120) dell'autorizzazione dell'ambiguità per risolvere l'ambiguità nel set (115) dei parametri di analisi ambigui ( φ ~ i ... φ ~ n; f (φ ~ i) ... f (φ ~ n); fenh, i (φ ^ amb) ... fenh, n (φ ^ amb); gp (φ ~ I) ... GP (φ ~ n); d (φ ~ i) .. .d (φ ~ n)) per ottenere un parametro consentito non ambiguo (φ ~ res; fres, 125). 3n. e 12 zp. F-Li, 22 yl.
L'invenzione riguarda il campo dell'idroacostica e può essere utilizzata come armamento idroacustico dei sottomarini di vari scopi, nonché durante le opere e la ricerca geologiche e idroacustiche sottomarine. Il complesso include i percorsi della riduzione del rumore principale e aggiuntivo, il percorso di rilevamento del segnale idroacustico, il percorso di idroacicolazione, il percorso di comunicazione e il percorso di identificazione, il percorso del ministero e il rilevamento degli ostacoli di navigazione, il sistema di elaborazione centrale, il sistema di visualizzazione, la registrazione, Documentazione e controllo e la gomma totale. In questo caso, tutte le antenne irradianti del percorso di idrolezione sono rese controllate elettronicamente sia dal numero di raggi delle caratteristiche di orientamento che dalla loro larghezza e direzione. Il percorso di rimozione del rumore principale contiene l'antenna della ricezione nasale principale e il primo dispositivo di pre-elaborazione. Il percorso di rilevamento dei segnali idroacostici contiene tre antenne riceventi e il secondo dispositivo di pre-elaborazione. Il percorso di idrolezione contiene tre antenne controllate elettronicamente e il dispositivo del primo generatore. Il percorso di comunicazione e l'identificazione contiene due antenne radianti e il dispositivo del secondo generatore. Ministand Ministand e Development Oblight Distribuzione costruita antenne, trasferimento di trasferimento, reparto generativo e sete di pre-elaborazione dispositivo. Il tratto di riduzione del rumore aggiuntivo contiene un'antenna rimasta estesa flessibile, cavo via cavo, un dispositivo di collezione corrente e un quarto dispositivo di pre-elaborazione. Risultato tecnico: migliorare il funzionamento del funzionamento del gas e l'intervallo di rilevamento di obiettivi in \u200b\u200bmodalità GL. 1 il.
Capitolo 1. Analisi dei metodi principali per determinare la posizione della fonte dei segnali di navigazione con perline ultra-filo.
1.1. Impostare il problema dello sviluppo di un complesso di navigazione idroacustica.
1.1.1. Esperienza dell'IPMT nello sviluppo dei sistemi di navigazione del RangeFinder.
1.1.2. I compiti di sviluppare Hans-uch.
1.2. Metodi di ampiezza per determinare le informazioni di illuminazione con antenne di piccole dimensioni (ultra-proposte).
1.2.1. Antenna equidistante lineare.
1.2.2. Antenna equidistante circolare.
1.2.3. Potenziale per affrontare accuratamente i ritardatori di ampiezza.
1.3. Sulla misurazione dello spostamento di fase del MESVD due segnali tonali, rumore distorto.
1.4. Direzione di fase stimata Ricerca di formule in sistemi con impianti antenne di configurazione.
1.4.1. Ricevitore di baia-elemento.
1.4.2. Ricevitore a quattro elementi.
1.4.3. Ritardo di fase a sei canali.
1.5. Il metodo di esaurimento della fonte dei segnali di navigazione utilizzando antenne circolari discrete con un gran numero di elementi.
1.5.1. L'output delle formule stimate e la valutazione dell'errore dell'UB-TITALER con una base circolare.
1.5.2. Gli algoritmi di ricerca della direzione per il cercatore di direzione con una base circolare, tenendo conto dei cambiamenti nell'orientamento dell'antenna angolare.
1.6. CONCLUSIONI.
Capitolo 2. Elaborazione statistica delle informazioni del sistema di navigazione idroacustica con base UltraShort.
2.1. Risolvere il compito di pannolini in base ai metodi di lavorazione statistica.
2.2. Equazioni di pannolini per antenne multi-elemento di varie configurazioni.
2.2.1. Antenna multi-elemento lineare.
2.2.2. Antenna con un numero arbitrario di elementi su un database circolare.
2.2.3. Antenna a quattro elementi.
2.2.4. Antenna circolare con un elemento aggiuntivo al centro.
2.2.5. Antenna a due cabina.
2.2.6. CONCLUSIONI.
2.3. Caratteristiche dell'elaborazione di un sacco di segnale di navigazione di frequenza.
2.4. Configurazione dell'antenna e potenziale valutazione dell'accuratezza.
2.4.1. Antenne con una distanza mezza-onda tra gli elementi.
2.4.2. Antenne riscritto.
2.4.3. Seleziona il settore della revisione basato sull'antenna Phasing.
2.5. CONCLUSIONI.
Capitolo 3. Metodologia per valutare l'accuratezza dei sistemi di navigazione con base ultra-viti.
3.1. Valutazione della componente sistematica dell'errore della definizione di cuscinetto.
3.1.1. Funzione di fase di un'antenna di ricezione imperfetta multi-elemento.
3.1.2. Sviluppo di attrezzature per la certificazione metrologica della ricezione di antenne multi-elemento.
3.1.3. Studi sperimentali dell'accuratezza delle antenne in condizioni di laboratorio.
3.2. Stime della precisione del Finder in direzione a banda larga (lo studio delle caratteristiche dell'antenna per l'elaborazione di un segnale di navigazione multi-frequenza).
3.3. Studi sperimentali delle principali caratteristiche del sistema di navigazione ultra-circuito-base nelle condizioni di un piccolo mare.
3.3.1. Il metodo di certificazione del sistema confrontando con i dati del sistema di navigazione certificato (nell'esempio di HANS-DB).
3.3.2. Metodi per valutare l'accuratezza delle misurazioni angolari tramite dati di rangefinder.
3.3.3. Metodo di laurea del sistema di navigazione ad ultra-tensione-base in condizioni di grande scala utilizzando il faro di riferimento.
3.3.4. Razionale metrologica per la laurea del sistema di navigazione ad ultra-tensione-base secondo Hans DB e GPS.
3.4. Valutazione delle caratteristiche metrologiche di Hans-UBB sotto il mare profondo.
3.5. CONCLUSIONI.
Capitolo 4. Metodi per la costruzione e lo sviluppo degli elementi principali del sistema di comunicazione idroacostico dell'apparato sottomarino. 146 4.1. L'approccio generale alla valutazione dei principali parametri del Gass per l'ANCA.
4.1.1. Generale.
4.1.2. Sulla struttura del simbolo delle informazioni.
4.1.3. Sulla sincronizzazione.
4.1.4. Sulla selezione del polso per valutare le caratteristiche del canale di comunicazione.
4.1.5. Elaborazione del blocco dati.
4.1.6. Modellazione numerica del canale di comunicazione. 153 4.2.0 Sviluppo di piezoropertori a banda larga e antenne per Gass.
4.2.1. Metodi cilindrici a banda larga Piezo-Metodi.
4.2.2. Piegioli cilindrici con caratteristiche controllabili
4.2.3. Formatori a banda a banda larga Piezo-Formas.
4.2.4. A proposito della corrispondenza elettrica dei piezopropertori in un'ampia banda di frequenza.
4.2.5. Sull'efficienza energetica dei trasduttori a banda larga.
4.2.6. Caratteristiche delle antenne sviluppate.
4.3. Ricevitore multi-elemento dei segnali con gass con controllo adattivo dell'HN in base al cercatore di direzione del sistema di navigazione.
4.3.1. Elaborazione dati.
4.3.2. Caratteristiche dell'antenna UBB quando si ricevono segnali del sistema di comunicazione.
4.4. Studio sperimentale del sistema di comunicazione multifrequenza non coerente con correzione dell'ampiezza del rapporto del cambio del canale.
4.4.1. Algoritmo per l'elaborazione di un segnale multifrequenza.
4.4.2. Schema strutturale Sistemi di comunicazione.
4.4.3. Studi sperimentali degli elementi del sistema di comunicazione idroacustica nelle condizioni di un piccolo mare.
4.5. CONCLUSIONI.
Capitolo 5. Sviluppo del ritardo di Doppler come parte del sistema di navigazione di bordo dell'apparato sottomarino.
5.1. Antenne.
5.2. Elaborazione spettrale dei segnali a impulsi corti.
5.3. Struttura e circuiteria.
5.4. Studi stranieri delle caratteristiche del ritardo come parte dell'anca.
5.5. CONCLUSIONI.
Capitolo 6. Implementazione tecnica ed esperienza della pratica applicazione dei mezzi idroacustici per la navigazione del robot sottomarino. 207 6.1. Implementazione tecnica del sistema di navigazione idroacustica con base ultra-viti.
6.1.1. Schema strutturale di Hans-UKB.
6.1.2. Caratteristiche dell'hardware della costruzione.
6.1.3. Sistema di navigazione dell'antenna di ricezione.
6.1.4. Elaborazione dati.
6.1.5. Interfaccia utente.
6.1.6. Software.
6.1.7. Test stranieri e funzionamento pratico di Hans-UKB.
6.2. Specifiche Gass dell'attrezzatura del kit.
6.2.1. Caratteristiche principali.
6.2.2. Principio di funzionamento.
6.2.3. Diagramma strutturale del ricevitore.
6.2.4. La struttura del segnale del gass.
6.2.5. I risultati dei test marini nel mare profondo.
6.3. Complesso di navigazione idroacustica.
6.3.1. La composizione e lo scopo del complesso di navigazione della nave.
6.3.2. Proposte tecniche per lo sviluppo di un sistema di navigazione e di gestione combinati.
6.4. Test complessi della navigazione e dell'esperienza idroacustica nel loro uso durante il vero lavoro.
6.4.1. Test di navigazione complessi.
6.4.2. Esperienza applicazione pratica Strumenti di navigazione idroacustica durante i veri motori di ricerca.
Elenco raccomandato di dissertazioni
Sviluppo di metodi e algoritmi per la navigazione a senso unico dei sottomarini inabitati autonomi 2013, candidato delle scienze tecniche Dubrovin, Fedor Sergeevich
Metodi per la lavorazione dei segnali idroacustici ricevuti nella zona di Fresnel che riceve ed emettere sistemi 2010, dottore di scienze tecniche Kolmogorov, Vladimir Stepanovich
Sott'acqua e navigazione utilizzando un campo elettromagnetico 2006, Doctor of Technical Sciences Shibkov, Anatoly Nikolaevich
Metodi e sistemi per migliorare la sicurezza della navigazione basata su dispositivi di navigazione idroacustica con una base lineare di ricevitori direzionali 2006, Doctor of Technical Sciences Zavyalov, Viktor Valentinovich
Navigazione dell'apparato sottomarino autonomo con l'aiuto di un sistema di navigazione inerziale inerziale 2017, candidato di scienze fisiche e matematiche Filatata, Gusel Amirovna
Lavoro di dissertazione simile nella specialità "Acoustics", 01.04.06 Cifra Vac
Sviluppo del metodo per aumentare la precisione del posizionamento degli oggetti sott'acqua 2013, candidato di teste di scienze tecniche, Alexander Alexandrovich
Metodo parametrico di trasformazione controllata di campi idroacustici di emissione di rumorosi di ricerca e pescherecci, metodi e sistemi della loro misura basati su modelli di acustica non lineare 2002, candidato di Scienze tecniche Khaliulov, Fargat Amershanovich
Sviluppo di algoritmi di elaborazione delle informazioni in sistemi multi-titolo utilizzando un'analisi spettrale rapida dei segnali 2005, candidato di scienze tecniche davletkaliyev, romano kuanishevich
Metodi e mezzi di supporto per la navigazione di aeromobili e controllo del traffico aereo basato su tecnologie satellitari 2004, Doctor of Technical Sciences Slepchenko, Peter Mikhailovich
Teoria e metodi per la progettazione di sistemi di antenna a banda ultra-fascia media per il radiodiffusione di radio e basamento mobile 2011, dottore di scienze tecniche Rebovsky, Yuri Anatolyevich
Conclusione della dissertazione sull'argomento "Acoustics", Matvienko, Yuri Viktovich
Risultati principali:
1. I principi di costruzione di sistemi ultra-tratteggiati sono stati studiati e un'analisi dei metodi di base per determinare la posizione angolare della fonte di segnali di navigazione tonale e della banda larga durante l'elaborazione delle informazioni di antenne di ricezione di piccole dimensioni sono state studiate.
Sono state ottenute espressioni stimate e la direzione che trova le caratteristiche delle caratteristiche di ampiezza è stata studiata in totale e la differenza di elaborazione dei dati.
La bassa potenziale accuratezza dei sistemi di configurazione più semplici contenenti una, due o tre coppie di ricevitori ortogonali sono annotati con metodi di elaborazione dei dati di fase e la necessità di complicazione dei sistemi per aumentare la precisione è annotato.
Un metodo per la regia Trovare la fonte dei segnali tonali in base all'uso di antenne con un gran numero di ricevitori strettamente posizionati su una base circolare con la definizione della fase cumulativa, il cui errore può essere ridotto a 0,1 gradus.
Le formule calcolate e sull'esempio di antenne circolari con un gran numero di elementi sono mostrate la connessione dei dati del sensore del corso, del rotolo e del differenziale e dei loro errori sul valore dei parametri di navigazione misurati e dei loro errori.
Sulla base del metodo massimo veritiero, il compito di elaborazione statistica dei dati di navigazione è stata risolta quando si utilizzano antenne discrete di configurazione arbitraria. In questo caso, la valutazione dei parametri desiderati è determinata mediante elaborazione congiunta di tutte le coppie di canali prese con scale diverse. I coefficienti di ponderazione contengono un componente geometrico, uguale al derivato della funzione di fase in base al parametro misurato e all'energia uguale al segnale del segnale-recitazione nel canale.
Le relazioni stimate derivano per la definizione di cuscinetto e l'errore di smorzamento per un numero delle configurazioni antenne più comuni: lineare, circolare, combinata.
Un cercatore di riferimento di fase è stato sviluppato in base all'uso di antenne circolari di dimensioni di grandi dimensioni con un numero limitato di elementi.
La tecnologia di riduzione del numero di canali di lavorazione con la conservazione della risoluzione angolare viene motivata separando la procedura di pannolini in due fasi: direzione grossolana trovata per determinare il settore della visione e la soluzione esatta dell'equazione del cuscinetto in una data approssimazione iniziale.
La possibilità di il permesso delle ambiguità fase derivante durante il funzionamento di antenne sparse da parte dei metodi di ampiezza della ricerca della direzione è stata giustificata.
Teoricamente ha dimostrato il conseguimento della risoluzione angolare di 0,1-0,2 gradi con il numero di canali 6-8 e la dimensione dell'onda dell'antenna 3-5 delle lunghezze d'onda della frequenza di navigazione.
Rapporti per il calcolo del cuscinetto di un'antenna discreta di piccole dimensioni, il tempo di propagazione del segnale acustico sull'apertura di cui è paragonabile alla frequenza media dello spettro ricevuto.
2. Metodi di ricerca per la valutazione dell'accuratezza della precisione di Hans UKB e dei metodi sviluppati per misurare le loro caratteristiche in condizioni di laboratorio e utensili.
Per descrivere un'antenna multi-elemento discreta, è stata proposta una funzione vettoriale, ogni componente di cui descrive l'elemento dedicato della dipendenza dell'antenna della fase del segnale acustico dalla direzione del suo arrivo. La definizione esatta (sperimentale) della funzione è obbligatoria quando risolve il compito di ritardare l'oggetto di navigazione.
Un supporto per la certificazione di antenne multi-elemento, che è installata in un bacino idroacustico specializzato e include una fonte di segnali regolabili e un sistema ricevente con una piattaforma rotante di precisione e apparecchiature di misurazione di fase multicanale per segnali di tipo a impulsi radio.
È stata sviluppata una tecnologia di certificazione dell'antenna, il che consiste nella misurazione sperimentalmente della funzione di fase dell'antenna, la determinazione delle funzioni analitiche che approssimazione dei dati ottenuti e dell'uso di risolvere le equazioni di ricerca di direzione, con la tabulazione della differenza di L'origine del cuscinetto e del suo valore reale (installazione) sotto forma di una valutazione del componente sistematico dell'errore.
Le antenne di ricezione multiple elemento per campioni attivi di sistemi sono sviluppati e studiati, che forniscono il valore di un errore sistematico intorno a 0,5 Aradus.
Un'analisi comparativa del lavoro di Hans DB e UBB nelle condizioni di un piccolo mare con un'installazione fissa dell'antenna di ricezione ACB viene eseguita.
Analizzato il metodo per stimare le misurazioni angolari relative in base al trattamento dei dati di rangefinder.
Il metodo di certificazione del sistema UCB nel Mare piccolo utilizzando il faro di riferimento basato sul trattamento dei dati di rangefinder è stato motivato. Si dimostra che con il relativo errore di misurazione del raggio, alcuni decimi percento, un errore del valore di progettazione del cuscinetto per Annea, che rende il movimento attorno all'UKB - antenna e un faro su una traiettoria chiusa, non supera un grado .
È stata effettuata un'analisi e le caratteristiche di precisione del sistema UCB in base ai risultati del lavoro nelle condizioni del mare profondo sono state determinate. Come dati di riferimento, i dati DB Hans sono stati utilizzati, il sistema di navigazione di bordo e il sensore di profondità, i dati del telemetro. La fattibilità di analizzare la variabilità differenziale dei dati del rangefinder per identificare i singoli frammenti della traiettoria del movimento dell'ANPA e la possibilità di una media ragionevole dei dati angolari con l'elaborazione della traiettoria viene mostrata. A seguito dell'analisi, la conclusione è giustificata sull'errore delle misurazioni angolari di circa 0,5.
La tecnica di eliminare le ambiguità di fase derivante dall'aumentare delle dimensioni della base di misurazione è stata motivata e provata sperimentalmente dall'elaborazione statistica dei segnali multi-frequenza.
L'antenna ricevente multi-elemento e l'attrezzatura della radiazione (ricezione) dei segnali complessi sono stati sviluppati e studiati sperimentalmente, sono state fatte stime dell'errore del sistema, che costituiscono il decimo di grandine.
3. I metodi sono studiati e mezzi di un sistema di trasmissione delle informazioni ad alta velocità per il canale idroacustico dal consiglio di amministrazione di ANCPA alla nave che fornisce la nave.
Studi di costruzione di convertitori a banda larga sono stati sviluppati e convertitori cilindrici e asta specializzati sono stati sviluppati con caratteristiche di orientamento speciali progettate per funzionare nelle apparecchiature di sistema di comunicazione: un convertitore cilindrico altamente efficiente è stato proposto con una larghezza di banda a tre ottava utilizzando sottili strati corrispondenti del corno configurazione, che soddisfa i requisiti per il lavoro in un piccolo mare; Viene proposta una varietà di convertitore di risonanza per le radiazioni e la ricezione di segnali multi-frequenza, realizzati sotto forma di un insieme di piezocilinder coassiali; Piston Piezopraverrters sono proposti con un tipo side lato hn per lavorare in un canale di propagazione del segnale verticale.
Analizzato la struttura del sistema di trasmissione dei dati per il canale multipath di comunicazione con l'adattamento del circuito di elaborazione attraverso il blocco dati della lunghezza finale. La trasmissione del blocco informativo è preceduto dalla procedura per l'impostazione delle impostazioni del ricevitore, la dimensione del blocco temporaneo è determinata dallo stato corrente del canale di comunicazione. I metodi di modellazione numerica hanno analizzato le caratteristiche della selezione dei segnali collegati e mostra l'opportunità di utilizzare il segnale alla fase combinata e la manipolazione della frequenza.
Una metodologia per stimare le caratteristiche dell'impulso del canale di comunicazione e la raffinatezza del momento della sincronizzazione trasmettendo e elaborando una serie di impulsi della fase alternata è proposta.
Lo schema di ricezione del sistema di segnalazione del sistema di comunicazione di un'antenna di navigazione multi-elemento con l'implementazione del filtro spaziale è proposto raggio diretto In condizioni di distribuzione multipata sulla base dei dati sulla posizione angolare della fonte di segnali e interferenze, ottenuta durante il lavoro di Hans UKB.
Studi sono stati effettuati e giustificati la possibilità di trasmettere informazioni in un canale di comunicazione multi-frequenza con un allineamento preliminare della risposta della frequenza di ampiezza attraverso il canale e la selezione del messaggio corrente basato su un'analisi comparativa di energia in ciascun canale di frequenza. Studi sperimentali di un tale sistema di elaborazione in un mare molto piccolo hanno confermato la possibilità di applicare attrezzature per la trasmissione immagini grafiche ad una velocità di circa 3000 bit / s con una bassa probabilità di errori.
4. Per la navigazione a bordo, il robot subacqueo è progettato e integrato nel complesso Doppler GAL.
Studi completati e sviluppati antenne specializzate in ritardo con elevata sensibilità eco ottenuta a causa del coordinamento meccanico acustoso ottimale dei metodi Piezo-Metodi dell'antenna con un ambiente di lavoro.
Per aumentare la velocità del GAL, viene proposto un metodo di elaborazione spettrale dei segnali a impulsi spettrali e implementati, fornendo una risoluzione ad alta frequenza a causa della formazione di lunghe implementazioni quasi coerenti dei segnali riflessi. Il metodo consente di determinare i componenti della velocità con la dispersione minima in un secondo.
Progettato e usato come parte del Gesso Doppler di esempio sperimentale ANPA
Una tecnica di laurea del ritardo in condizioni di grande scala è stata sviluppata calcolando la velocità dell'ANPA sulla gamma che trova i dati di Hans.
5. Progettato, testato e testato in operazioni reali Un complesso di navigazione idroacustica, che garantisce la formazione di un'immagine di informazioni sulla navigazione del movimento della missione a bordo del recipiente di fornitura e ANCA, costituito da strumenti di navigazione idroacustica, trasmissione di informazioni e misurazione di assoluto velocità.
Progettato, testato in un mare piccolo e profondo e integrato nel complesso di navigazione dell'Hans UKB, che include: una fonte sincronizzata del segnale di navigazione presso la struttura, un complesso di elaborazione della nave con un'antenna ricevente su un cavo cavo, il ricevitore GPS. Il sistema ha le seguenti caratteristiche: intervallo - 6-10 km; L'errore della misura del cuscinetto è inferiore a 1 gradi; L'errore di misurazione limite è dello 0,5%. Confermato sperimentalmente la possibilità di gestire il sistema nella posizione della posizione dell'Ana, che rende una lunga transizione lungo l'oggetto esteso con il movimento della nave che fornisce la nave e rimorchiare l'antenna ricevente a una velocità fino a 5 nodi.
Progettato, testato e utilizzato come parte di un apparato nascosto un sistema ad alta frequenza di navigazione UKB con il posizionamento della fonte a bordo della nave e del ricevitore sulla macchina.
Progettato e testato nella composizione dei mezzi idroacustici per la navigazione e il supporto delle informazioni, un'apparecchiatura di trasmissione dell'apparecchiatura APA per il controllo operativo dello stato di sorveglianza e del lavoro di ricerca nelle condizioni del mare profondo e del canale di comunicazione verticale. L'apparecchiatura fornisce la trasmissione dei dati ad una velocità di 4000 bit / s, con una probabilità di errori dell'unico per cento, che garantisce la trasmissione delle cornici dell'immagine per 45c.
Progettato, testato e integrato nel sistema di navigazione di bordo Doppler GAL, fornendo la misurazione della velocità assoluta dell'anna nell'intervallo di velocità 0-2m / s con un errore di 1-2 cm / s.
Viene proposta la tecnologia di applicazione del complesso di navigazione:
Hans DB - per molteplici corse dell'anna nelle aree dedicate con la ricerca in aree con maggiori requisiti per la precisione.
Hans UKB Se non vi sono più transizioni quando si tracciano oggetti estesi o scopi mobili, in caso di inizio di emergenza dell'anna, nel caso di lanci segreti.<
A con il calcolo delle traiettorie sul numero - quando l'ANCA viene rilasciata in un punto specificato, quando si aggiunge all'uso dei sistemi TV.
Il lavoro di successo del complesso nella composizione dell'ANC non dimostra quando si esegue i veri motori di ricerca nell'oceano.
Gratitudine.
In conclusione, voglio esprimere un profondo apprezzamento a tutti i dipendenti dell'IPMT, che ha partecipato allo sviluppo e test di sistemi idroacustici di veicoli sottomarini. Un ringraziamento speciale all'Accademico Ageev M.D., le teste della regione Kaskin, B. A. e Rylov N.I.
Conclusione
Referenze Ricerca per dissertazione doctor of Technical Sciences Matvienko, Yuri Viktovich, 2004
1. AGEEV M.D. Veicolo modulare senza equipaggio autonomo di 1.TP. - Journal MTS, 1996, Vol. 30, 1, p. 13-20.
2. Veicoli sott'acqua disabitati autonomi. Sotto il generale ed. Acad. Ageeva m, d. - Vladivostok, Dalnawka, 2000, 272c.
4. R.BABB. Navigazione AUV per indagini scientifiche subacquee. Tecnologia marittima, 1990, dicembre, p.25-32.
6. J. Romeo, G. Lester. La navigazione è la chiave per le missioni AUV. Tecnologia Sea, 2001, Dicembre, P.24-29.
7. Borodin v.i., Smirnov G.E., TOLLVA H.A., YAKOVLEV G.V. Strumenti di navigazione idroacustica. L., Costruzione navale, 1983, 262c.
8. Miln P.H. Sistemi di posizionamento idroacustico. L., costruzione navale, 1989,316c.
9. Gestone J.A., Cyr R.J., Roesler G :, George E.S. Sviluppi recenti nella navigazione subacquea acustica. Journal of Navigation, 1977, V.30, 2, p.246-280.
10. Boldrev B.C. Metodi di precisione Definizioni di coordinate durante il lavoro idroposico in mare aperto. Edificio navale all'estero, 1980. №2. C.29-42.
11. Kyslov A. F., Postnikov I.V. Caratteristiche della precisione dei sistemi di navigazione del Beacon con una lunga base acustica. Tez. Dokl. 2 All-Union. Conf. Ricerca e sviluppo dell'oceano, L., 1978. PMI.2, p.95-96.
12. Kasatkin B.A., Kobidze V.V. Caratteristiche della navigazione idroacustica nella zona di scaffale. In Sat. Dispositivi subacquei e dei loro sistemi, da DFFA, Vladivostok, 1977, dall'84-88.
13. Kasatkin B.A., Kobidze V.V. Sistema di navigazione a rangefinder sincrono idroacustico. Brevetto r.f. G01s 9/60, № 713278, 1978.
14. Smirnov G.E., TOLLOVA N.A. Sistemi di navigazione con fari idroacustici. Edificio navale all'estero. 1980, №9, p.45-54.
15. K. Vestgard, R. Hansen, V. Jalving e H.perersen. The Hugin 3000 sondaggio AUV -Design e Risultati campo.- / Intervento subacqueo 2001 /.
16. T. Martin e G. Pilgrim. Sfide del sondaggio in Posizionamento USBL acustico acustico di veicoli sottomarini rimorchiati o tethered. .- / intervento subacqueo 2001 /.
17. Hubert Thomas, Eric Petit. Dai veicoli sottomarini autonomi (AUV) ai veicoli sott'acqua supervisionati (SUV). Oceans-97.
18. Paramonov A.A., Klyuev M.C., Stozhev P.P. Alcuni principi per costruire sistemi di navigazione idroacustica con un database lungo. VII Interddes. Scuola scientifica. conf. "Moderni metodi e mezzi di studi oceanici", Mosca, 2001, P.244-245.
19. Paramonov A.A., AFANASYEV V.N. HANS-M Sistema di navigazione idroacustica. VI Interni Scuola scientifica. conf. "Metodi e mezzi moderni di ricerca oceanica", Mosca, 2000, p. 100-112.
20. Ageev MD, Blidberg D.R., Kiselev Ji.b., Rylov N.I., Shcherbatyuk A.F. Stato e prospettive per lo sviluppo della robotica subacquea. Tecnologie del mare, Vladivostok, Dalnalock, 2001, ISK.4, P.6-23.
21. Ageev MD, Casatkin B.A., Kiselev L.V., Molokov Yu.G., Nikiforov V.V., Rylebov n.i. Veicoli sottomarini automatici. L., Costruzione navale, 1981.248 p.
22. J. Manley. Veicoli subacquei autonomi per l'esplorazione dell'oceano. 0ceans-2003, P.327-331.
23. Kobidze v.V. La velocità della propagazione dei segnali idroacustici nella gamma di intervalli. Preprint, Vladivostok, che Fedz Academy of Sciences of the ussr, 1979, 37c.
24. Kobidze v.V. Lo studio della precisione del rangefall hydroacoustic. - Autore della dissertazione KF-M.N. Vladivostok, che DVTC dell'URSS Academy of Sciences, 1981, 26c.
25. Xavier Lurton, Nicholas W. Millard. La fattibilità di un sistema di posizionamento acustico di Vaiy-Long Baseline per AUV. Procedimento dell'oceano-94, Brest-France, 1994, Vol.3, PP. 403-408.
26. Kasatkin B.A., KOSAREV G.V. Caratteristica dello sviluppo delle APS per AUV molto a lungo raggio. Procedimento dell'oceano-95, San-Diego, ottobre 1995, V. Io, p. 175-177.
27. Kasatkin B.A. Sistema a lungo raggio di intervallo sincrono idroacustico. Brevetto r.f. G01s 15/08, № 2084923, 1995.
28. Posizionamento acustico. www. Mors.fr.product.
29. Intervallo combinato e sensore di navigazione dei cuscinetti. Modello NS-031. -www. Sonatech.com.product.
30. Kasatkin B.A. Sistema di navigazione a rangefinder sincrono idroacustico. Brevetto r.f. G01s 15/08, № 2084924, 1995.
31. D. Thomson, S. Elson. Sistemi di posizionamento acustico di nuova generazione. 0ceans-2002, p.1312-1318.
32. Transponder generico programmabile e super sub-mini Transponder / Risponditore, Tipi 7971/7977 / 7978,7970 / 7973 www.senardyne.co.uk
33. B. Manson. Posizionamento dell'ampia area con precisione LM. -Sistemi oceanali internazionali, Desember 2001, p. 15-19.
34. Kasatkin B.A., KOSAREV G.V. Basi fisiche di rangefall acustico. Bollettino del Dvo r e998, №3.c.41-50.
35. Kobidze v.V. Modelli di errori e algoritmi per l'elaborazione della gamma di informazioni rivolte verso i sistemi di navigazione idroacustica. Predprint, Vladivostok, che DVTC dell'URSS Academy of Sciences, 1979, 42c.
36. Kasatkin B.A. Caratteristiche invarianti del campo sonoro nell'oceano a strati. Dokl. Accademia delle scienze dell'URSS, 1986, 291, №6, p. 1483-1487.
37. M.Deffenbaugh, J.G. Bellingham, N. Schmidt. La relazione tra posizionamento sferico e iperbolico. Procedimento dell'oceano-96,
38. Kasatkin B.A., KOSAREV G.V. Analisi dell'accuratezza della misurazione delle coordinate dei Beacon-rispondenti del sistema di navigazione idroacustica. Tecnologie del mare, problema.1. Vladivostok, Dalnaka, 1996, P.60-68.
39. Kasatkin B.A., KOSAREV G.V. L'uso del metodo Traverse per determinare le coordinate assolute dei fari del rispondente. Tecnologia marittima, vol.2. Vladivostok, Dalnaka, 1998, P.65-69.
40. J. Openderbecke. Calibrazione in mare di un sistema di positing del veicolo sottomarino USBL. -Ceans "2000.
41. Posidonia 6000. Sistema di posizionamento acosistico subacqueo. www.ixsea-ceano.com.
42. Newsletter. Kongsberg Simrad. Edizione n. 2-2000. www.kongsberg-simrad.com.
43. K. Vestgard, R. Hansen, B.Jalving, O.A. Pedersen. Il sondaggio Hugin 3000 AUV. Risultati di desigh e campo. 0ceans "2001.
44. Sistema di monitoraggio a basso costo LXT. www.ore.com.
45. Thomas C. Austin, Roger Stokey, C. Von Alt, R. Arthur, R. Goldborough. Ratti, un relativo sistema di monitoraggio acustico sviluppato per la navigazione dell'oceano profondo - Oceans "97.
46. \u200b\u200bThomas C. Austin, Roger Stokey. Tracciamento acustico relativo.- Tecnologia Sea, 1998, marzo, P.21-27.
47. M. Watson, C. loggins e y.t. OCHI. Un nuovo sistema High Accuracy Super Breve Base (SSBL). Tecnologia subacquea, 1998, P.210-215, Tokyo, Giappone.
48. James E. Deveau. Sistemi di posizionamento acustico subacqueo. Oceans-95, Vol.1, p. 167-174, San Diego, USA.
49. Nautronix. ATS posizionamento accurato www.nautronix.com.
50. Yin Dongmei, canzone Xinjian, Feng Haihong. La tecnologia chiave per implementare un sistema di tracciamento e posizionamento dell'oggetto subacqueo. -Il workshop internazionale 3-D Harbin, Cina, 2002, P.65.
51. Yin Dongmei, canzone Xinjian, Feng Haihong. Progettare un sistema di positing acustico subacqueo. Il workshop internazionale 3-D Harbin, Cina, 2002, P.43.
52. KOMULAKOV B.A. Sistemi idroacustici con beacon per intervistati per il monitoraggio dei complessi sottomarini rimorchiati. - Costruzione navale, 1997, n. 6, p.39-45.
53. Paramonov A.A., Nosov A.V., Kuznetsov V.n., Dreuchsev S.A., Klyuev M.S., I I I
54. Storozhev P.P. Migliorare la precisione del sistema di navigazione idroacustica con una base del nucleo di altura. VII International Conferma. Secondo Oceanology, M., 2001, P.80-81.
55. Bogorodsky A.V., Koryakin Yu.a., Ostrukhov A.A., Fomin Yu.P. Tecnica di ricerca sulla tecnologia idroacustica e tecnica di sviluppo dell'oceano. VII International Conferma. Oceanologia, M., 2001, P.266-269.
56. Zlobina N.V., Kamenev S.I., Kasatkin B.A. Analisi dell'errore del sistema di navigazione idroacustica con base ultra-viti. In Sat. Robot subacquei e i loro sistemi. Edizione 5.1992, Vladivostok, IPMT DVO RAS, P.116-123.
57. Kasatkin B.A., Kulinchenko S.I., Matvienko Yu.V., Nurgaliev R.F. Lo studio delle caratteristiche del Finder in direzione di fase per UBB-Hans.- in Sat. Robot subacquei e i loro sistemi. Vish.6.1995, Vladivostok, Dalnawka, P.75-83.
58. Kasatkin B.A. Valutazione dell'errore dell'UB-TITALER con una base circolare. In Sat. Tecnologia marittima. Vol. 1.1996, Vladivostok, Dalnawka, P.69-73.
59. Kasatkin B.A., Matvienko Y.V. Il metodo per determinare il cuscinetto sulla fonte di radiazioni e il dispositivo per la sua attuazione. RF brevetto n. 2158430, a tinga. Isoble. Archivio Fotografico, 2000
60. Matvienko yu.v., makarov v.n., kulinchenko s.i. , Nurgaliyev r.f., rylov r.n. Sistema di navigazione idroacustica con base UltraShort. Sea Technologies, Vladivostok, Dalnalock, 2000, Scarico, S. 102-113.
61. Matvienko yu.v. Elaborazione dei dati in un cercatore UB-Direction basato su un'antenna multi-elemento imperfetta. VIII Interddes. Scuola scientifica. conf. "Metodi e mezzi moderni della ricerca oceanica" Moscow, 2003, parte 1, P.24-25.
62. John G. Proakis. Comunicazioni digitali. Editoria Casa di Electronics Industry, Cina, Pechino, 2000, 928p.
63. M.STOJANOVIC. Recenti progressi nelle comunicazioni acustiche subacquee ad alta velocità. IEEE Journal Oceanic Engineering, Vol.2 L, No.2, 1996, p. 125-136.
64. M.STOJANOVIC, J.CATIPOVIC, J.PROAKIS. Fase Comunicazioni digitali coerenti per canali contabili subacquei. IEEE Journal Oceanic Engineering, vol. 19, no. 1, 1994, P.100-111.
65. Stojanovic M., J.A. Catipovic e J.G. Proacis. Complessità ridotta Elaborazione spaziale e temporale dei segnali di comunicazione acustica subacquea.- J. Acoust. Soc. Am., 98 (2), pt.l, ago. 1995, p.961-972.
66. J. Labat. Comunicazione subacquea in tempo reale. Ocean-94, Brest, Francia, Vol.3, P.501-506.
67. A.G. Bessios, f.m. Caimi. Compensazione multipath per la comunicazione acustica subacquea. Ocean-94, Brest, Francia, Vol.1, P.317-322.
68. Lester R. Leblanc. Elaborazione spatio-temporalo di dati coerenti di comunicazione acustica in acque poco profonde. Ieee J. Ocean. ITA. Vol.25, n. 1, gennaio 2000, p. 40-51.
69. Lester R. Leblanc. Adaptive Beamformer per la comunicazione in acque poco profonde
70. B. Geller, V. Capellano, J.M. Brossier, A. Essebbar e G. Jourdain. Equalizzatore per la trasmissione del tasso di video nella comunicazione subacquea multipath. Ieee J. Ocean. ITA. VOL.21, NO 2, Apr. 1996, p. 150-155.
71. Billon D., Quellec B. Performance di sistemi di comunicazione subacquea acustica di dati elevati utilizzando bizzarri e equalizzazione adattativi. Ocean-94, Brest, Francia, Vol.3, P.507-512.
72. R. Coata. Comunicazione acustica subacquea. Tecnologia marittima, 1994, n. 6, p. 41-47.
73. A. Zielinski, Yoon Yoon Giovani-Hoon, Lixue Wu. Analisi delle prestazioni delle comunicazioni acustiche digitali in canale acque poco profondo. IEEE Journal Oceanic Engineering, Vol.20, No.4, 1995, P.293-299.
74. L. Wu e A. Zielinski. Rifiuto multipath con collegamento acustico a fascio stretto. -Oceans-88, Baltimora, P.287-290.
75. Wang c.h., Zhu min, Pan Feng, Zhang X.j., Zhu W.Q. Modem di comunicazione acustica subacquea MPSK.
76. Serie ATM 870. Modem di telemetria acustica. Manuale utente. - DataSonics, Febbry 1999.
77. K. Scussel, J.RICE, S. Merriam. Un nuovo modem acustico MFSK per il funzionamento nei canali subacquei avversi. Oceans-97, Halifax.
78. J. Catipovic, M. Deffenbaugh, L.freitag, D. Frye. Un sistema di telemetria acustica per l'acquisizione e il controllo dei dati di ormeggio dell'oceano profondo. Oceans-89, p. 887-892.
79. F. Caimi, D. Kocak, G. Ritter, M.Schalz. Confronto e sviluppo di algoritmi di compressione per telemetria AUV. Advancements recenti.
80. P.I. Penina, e.a. Tsellev. Su alcune approssimazioni utilizzate nel calcolo dei canali di comunicazione idroacustica. Compilazione acustica dell'estreggiante orientale, Vol. 1, Vladivostok, 1975, p. 15-18.
81. P.I. Penina, e.a. Tsellev, A.V. Shulgin. Calcolo di energia dei canali di comunicazione idroacustica. Compilazione acustica dell'estreggiante orientale, Vol. 1, Vladivostok, 1975, p. 19-23.
82. Svverkin E.I. Telemetria idroacustica in oceanologia. - L. 1978. 149c., Editoria Casa di Lenuniversity.
83. V.P. Kodanev, S.P. Piskarev. Metodi per ottimizzare le caratteristiche del sistema di trasmissione di informazioni digitali sul canale idroacustico in condizioni di ricezione monocrome. Magazine acustica, 1996, volume 42, №4, p.573-576.
84. Yu.V. Zakharov, V.P. Kodanev. La resistenza al rumore del ricevimento adattivo di segnali acustici complessi in presenza di riflessioni dai confini dell'oceano. Magazine acustica, 1996, volume 42, №2, p.212-219.
85. Yu.V. Zakharov, V.P. Kodanev. Adattativa ricezione dei segnali nel canale di comunicazione idroacustico per quanto riguarda Doppler Scattering Acoustic Magazine, 1995, Volume 41, n. 2, P.254-259.
86. Yu.V. Zakharov, V.P. Kodanev. Studi sperimentali di un sistema di trasmissione di informazioni acustiche con segnali di rumore. Magazine acustica, 1994, volume 40, №5, p.799-808.
87. Volkov A.V., Kuryanov B.F., Penkin M.M. Comunicazione idroacustica digitale per applicazioni oceaniche. VII International Conferma. Oceanologia, M., 2001, p.182-189.
88. L.R. Leblanc e r.r.j. Beaujean. Elaborazione spatio-temporalo di dati coerenti di comunicazione acustica in acque poco profonde. IEEE Journal Oceanic Engineering, vol.25, no. 1, 2000, P.40-51.
89. M. Suzuki, K. Nemoto, T. Tsuchiya, T. Nakarishi. Telemetria acustica digitale di informazioni video a colori. Oceans-89, p.893-896.
90. R. RowLends. F.kvinn. Limiti della velocità del trasferimento delle informazioni nella telemetria idroacustica. - Nel cn. Acoustics sott'acqua, Mosca, Mondo, 1970, P.478-495.
91. Creste A.A. Contatori di velocità della nave. Ji., Occupazione, 1978, 286C.
92. K.V. Jorgenson, B.L. Grose, f.a. Crandal. Sonar Doppler applicato alla navigazione di precisione Uldorater. Ocean-93, Vol.2, P.469-474.
93. Kasatkin B.A., Zlobin H.b., Kasatkin S.B. Analisi delle caratteristiche dell'Agente Piezo-Forming dell'antenna fasata di Doppler GAL. In Sat. Tecnologia marittima. Vol. 1.1996, Vladivostok, Dalnawka, P.74-83.
94. R. Pinkel, M. Merrefield e J. Smith. Sviluppo recente nella tecnologia Doppler Sonar. . Ocean-93, Vol.1, P.282-286.
95. Rdi Workhorse Navigator DVL. www.rdinstruments.com.
96. DEMIDINE B.M., ZOLOTAREV B.B., MATVIENKO YU.V., PLOTSKY V.D., SERVETRIKOV M.I. Sistema di navigazione idroacustica. Tez. Fondazione 22 Scientifica e tecnologia. Konalnevost. Polytech. Inst. Vladivostok, 1974.
97. DEMIDIN V.M., MATVIENKO YU.V., PLOTSKY V.D., Servertikov M.I. Sistema di navigazione dell'apparato sottomarino "Skat". Tez.donal 1 All-Union. Conf. Secondo lo studio e lo sviluppo delle risorse oceaniche del mondo. Vladivostok, 1976.
98. Dorokhin K. A. Presentazione dei dati del sistema di navigazione idroacostico. In Sat. Robot subacquei e i loro sistemi. Edizione 5.1992, Vladivostok, IPMT DVO RAS, P.94-100.
99. Dorokhin K. A. hardware e software del blocco navale del sistema di navigazione idroacustico. In Sat. Robot subacquei e i loro sistemi. Edizione 5.1992, Vladivostok, IPMT DVO RAS, p. 101-109.
100. DOROKHIN K.A. Controller del sistema di navigazione idroacustico. In Sat. Robot subacquei e i loro sistemi. 1990, Vladivostok, IPMT DVO Academy of Sciences of the URSSR, con. 102108.
101. SOSALIN YU.G. Basi teoriche di radar e navigazione radio. M., Radio e Comunicazione, 1992, p. 134.
102. Matvienko yu.v. Sull'accuratezza delle indenni di ampiezza dei cercatori. Limit Technologies, Vladivostok, Dalnawka, 2003, Edizione 5, p.56-62.
103. Smartyshev MD, Dobrovolsky Yu.yu. Antenne idroacustiche. Directory.-Ji., Costruzione navale, 1984, p. 171.
104. Ya.D. Shirman, V.n. Manjo. Teoria e tecnica di elaborare informazioni sul radar sullo sfondo dell'interferenza. M., Radio e Comunicazione, 1981, 416 ° C.
105. J. Bendat, A. Pirsol. Analisi applicata dei dati casuali. Mosca, Mir, 1989, 542c.
106. Kenneth S. Miller, Marvin M. Rochwardger. Acovariance Approch alla stima del momento speculale. Ieetractions sulla teoria dell'informazione, settembre. 1972, P.588-596.
107. Weiqing Zhu, Wen Xu, Jianyun Yu. Stima dell'errore dello stimatore di fase differenziale della correlazione della coppia di impulsi della matrice del sonar. Oceans-96.
108. Zhu Weiqing, Wang Changhong, Pan Feng, Zhu min, Zhang Xiangjun. Stima spettrale in ADSP. Oceans-97.
109. Sviluppo di dispositivi, dispositivi e principi per la costruzione di sistemi idroacustici dell'apparato sottomarino. - // Segnala su OKR "Mayak-IPMT" //, Scientific. Mani. Matvienko yu.v. Vladivostok, GFC Ngo Delstandart, 1992, 190s.
110. Matvienko yu.v., rylov r.n., rylov n.i. Sviluppo di un'antenna ricevente di un idroretor di fase baatiche della vista laterale. VII Interddes. Scuola scientifica. conf. "Metodi e mezzi moderni di ricerca oceanica", Mosca, 2001, p.
111. Sviluppo e creazione di un apparato sottomarino disabitato autonomo con una maggiore distanza e autonomia. // scientifico. Mani. Accademico Ageev MD, P. Artista Matvienko Yu.V., Vladivostok, IPMT DBO RAS, 2001, No. Stato ROS. 01.960.010861.
112. Rapporti speciali su OCC "K -1R" // Accademico capo Designer Ageev MD, Deputy Gl. Cost. Matvienko yu.v. Vladivostok, IPMT DVO RAS, 1998-2003.
113. G. Korn, T. Mais. Manuale della matematica.- Mosca, Scienza, 1970, 720 ° C.
114. Matvienko yu.v. Elaborazione statistica delle informazioni del sistema di navigazione idroacustica con base ultra-viti. In Sat. Tecnologia marittima. Problema.2.1998, Vladivostok, Dalnawka, P.70-80.
115. Rylev n.i. Sulla definizione di parametri di navigazione in UKB Hans secondo un'antenna multi-elemento. In Sat. Tecnologie marine, Vladivostok, Dalnawka, 2003, Edizione 5, p.46-55.
116. A. Steele, S. Byrne, J. Riley, M. Swift. Confronto di prestazioni di algoritmi di stima dei cuscinetti ad alta risoluzione utilizzando dati simulati e di prova del mare. IEEE Journal Oceanic Engineering, Vol.L8, No.4, 1993, P.438-446.
117. P. Kraeuther, J. Bird. Componenti principali Elaborazione dell'array per la mappatura acustica SWAH. Oceans-97.
118. Circuiti integrati super-alti e moderna elaborazione del segnale. Ed. S. Guna, X. Whitehaus. T. Kilat., Mosca, Radio e Comunicazione, 1989, 472C.
119. Marple ml. C.ji. Analisi spettrale digitale e sua applicazione. M. Mondo., 1990, 584c.
120. A. Steele, c.byrne. Elaborazione dell'array ad alta risoluzione che utilizza tecniche di ponderazione implicita dell eigenvettore. IEEE Journal Oceanic Engineering, vol. 15, no. 1, 1990, p.8-13.
121. R. Roy e T. Kailath. Esprit- stima dei parametri del segnale tramite tecniche di invariamento rotazionale. Transazioni IEEE su acustiche, parlato e trattamento del segnale, vol.37, No.7, 1989, p.984-994.
122. Gao Hogze, Xu Xinsheg. Ricerca sul metodo di rilevamento di fase del sistema di batimetria multistrato Swath. IWAET-99, Harbin, China, 1999, p. 198-203.
123. Kinkulkin I.e., Rubtsov V.D., Fabrik M.A. Metodo di fase per determinare le coordinate. M., 1979,. 280s.
124. Matvienko Yu.V., Makarov V.n., Kulinchenko S.I., Rylov R.N., un ritardatore di segnali di navigazione a banda larga. In Sat. Sea Technologies, Vladivostok, Dalnalock, 2000, Scarico, S. 114-120.
125. Matvienko Yu.V., Makarov V.n., Kulinchenko S.I., Nurgaliyev R.F., Rylov R.N., Kasatkin B.A. Il ritardatore del sistema di navigazione idroacostico con base ultra-viti. Brevetto RF №2179730, a tinga. Isoble .№5, 2002
126. V. Douglas e R. Pietsch. Tecniche ottimali di raggio per array imperfettamente calibrati. Procedimento dell'oceano-96,
127. MD. Ageev, A.A. Boreyko, Yu.V. Vaulin, b.e. Gornak, B.b. Zolotarev, yu.v. Matvienko, A.F. Shcherbatyuk ha aggiornato il sottomarino TSL per lavorare sullo scaffale e nei tunnel. - in Sat. Sea Technologies, Vladivostok, Dalnawka, 2000, Scarico, P.23-38.
128. Matvienko Yu.V., Makarov V.n., Kulinchenko S.I. Sulla selezione della struttura e delle caratteristiche dell'apparecchiatura del canale di comunicazione idroacustica della macchina subacquea. - Sat. Tecnologie marine, Vladivostok, Dalnawka, 1996, Edizione.1, P.84-94.
129. Matvienko Yu. V. stima dei parametri principali del sistema di comunicazione idroacustica per la macchina subacquea. In Sat. Tecnologia marittima. Stage.4.2001, Vladivostok, Dalnawka, S.53-64.
130. Ricerca previste sulla creazione di una gamma unificata di apparati autonomi gestiti per aumentare l'efficienza dei sistemi di illuminazione di lotta sottomarina, navigazione, anti-sottomarina e anti-mineraria
131. Navy. // Segnala su Nir "Centurion-Dvo" //, Scientific. Mani. Accademico Ageev MD, P. Artista Matvienko Yu.V., Vladivostok, IPMT DVO RAS, 1996
132. Fondazioni teoriche del radar. Ed. V.e. Dulevich., Mosca, Radio Sovietica, 1978, 608C.
133. Kasatkin B.A., Matvienko Yu.V. Alla valutazione della banda larga di convertitori cilindrici a bassa frequenza. Magazine acustica, 1983, volume 29, №1, p.60-63.
134. BALABAEV S.M., IVIN N.F. Modellazione del computer di oscillazioni ed emissione di dimensioni finite. Vladivostok, Dalnaka, 1996, 214 p.
135. Convertitori piezocemici. Directory ed. Pugacheva s.i. -Leningrad, edilizia navale, 1984, 256s.
136. Matvienko yu.v. Metodi di sviluppo e ricerca per descrivere e costruire convertitori di piezoli cilindrici a banda larga. Abstract dis. K.f.-m.n. Anatra Fedz Academy of Sciences of the ussr, 1985, 22c.
137. Matvienko yu.v., yermolenko yu.g., kirov i.b. Caratteristiche dello sviluppo delle antenne della gamma a metà frequenza per i sistemi idroacustici dell'apparato acque profondo. Tez. Dokl. Interunione. Conf. , Ed, Tovvmu, Vladivostok, 1992, P.78-83.
138. v.a. Kasatkin, ju.g. Larionov, Matvienko y.V.Deviluppo di array acque profonde per il subbottom profiler.- Procedimento degli Oceans-94, Brest-France, 1994.
139. Kasatkin B.A., Matvienko Yu.V. Lo spettro della propria frequenza del piezagreverter cilindrico. Journal acustico, 1979, Volume 25, n. 6, p.932-935.
140. Kasatkin B.A. , Yermolenko yu.g., matvienko yu.v. Piezopreverter multifunzione per la ricerca subacquea. Sabato Robot subacquei e dei loro sistemi, IPMT DVO RAS, IP.5.1992, p. 133-140. "
141. Ermilenko Yu.G., Kasatkin B.A., Matvienko Yu.V. Emettitore idroacustico. Brevetto della Federazione russa №2002381, 1993.
142. Kasatkin B.A., Matvienko Yu.V. Convertitore elettroacustico. -. Auto SVID. №1094159, bul. Isolare., №19,1984.
143. Matvienko yu.v, sull'effetto della struttura del riempimento interno sulle caratteristiche degli agenti piezo-formatori cilindrici. Nel libro: Metodi fisici usati in ricerca e controllo non distruttivi., Khabarovsk, 1981, parte 2, p. 125-126.
144. Kasatkin B.A., Matvienko Yu.V. Piezo-convertitore cilindrico con inversione inversione nel libro: uso dei moderni metodi fisici in ricerca e controllo non distruttivi., Khabarovsk, 1981, parte 2, p.131-132.
145. Kasatkin B.A., Matvienko Yu.V. Radiatore di misurazione della gamma audio della frequenza audio. Dimensioni acustiche. Metodi e mezzi. IV Sessione della Società Acoustica russa, Mosca, 1995, P.4.
146. Kasatkin B.A., Matvienko Yu.V. Convertitore elettroacustico cilindrico. Auto SVID. №1066665, bul. Freno, №2,1984.
147. Kasatkin B.A., Matvienko Yu.V. Piezopreverter cilindrico con caratteristiche controllate. Magazine acustica, 1982, volume 28, №5, p.648-652.
148. Kasatkin B.A., Matvienko Yu.V. Dispositivo per radiazioni audio a banda larga. Auto SVID. №794834, 1982.
149. Analisi e sviluppo delle antenne idroacustiche a banda larga basate su convertitori piezoceramici. // segnala su Nir "Thinker -1" //, scientifico. Mani. Matvienko yu.v., Vladivostok, GFC ONG ELANDART, 1983-1985.
150. Sviluppo e test di un percorso di radiazione del segnale a forma speciale.
151. Rapporti sul componente del Nir "Evolvent -polos" //, scientifico. Mani. Matvienko yu.v., Vladivostok, GFC Ngo Dalstandart, 1988-1990.
152. Indagine sulla funzione di trasferimento di una guida d'onda acustica e antenne.
153. Rapporti su Nir Aquamarine //, Scientific. Mani. Kasatkin B.A., P. Artista Matvienko Yu.V., Vladivostok, GFC Ngo Delstandart, 1989. .94c., Nessun numero di stato. 01.890.073426.
154. Kasatkin B.A., Matvienko Yu.V. Caratteristiche dell'impulso dei metodi cilindrici Piezo-Metodi. Tez. Dokol All-Union Conf. Mondo oceano, Vladivostok, 1983, p. sedici.
155. Rylev n.i. , Matvienko yu.v., rylov r.n. Antenna di ricezione della fase di visiera laterale Baatiche. Brevetto della Federazione russa № 2209530, 2003
156. r.a. Monzingo, Tu. Mugnaio. Gruppi di antenna adattiva. M., Radio e Comunicazione, 1986, 446s.
157. Matvienko yu.v., makarov v.n., kulinchenko s.i. Su un metodo per costruire un ricevitore gass per un mare molto piccolo sab. Ricerca e sviluppo del mondo oceano, 6 si affacciano. Akust. Conf., Vladivostok, 1998, p. 162-163.
158. Matvienko Y.V., Makarov V.n., Kulinchenko S. I. Sistema semplice di comunicazione idroacustica in mare poco profondo per AUV. Edilizia navale e ingegneria oceanica, problemi e prospettive, Vladivostoc, 2001, p. 495-498.
159. Matvienko yu.v., Makarov B.H., Kulinchenko S.I. Un semplice sistema di comunicazione idroacustica in un piccolo mare per Ancpa a Sat. Problemi e metodi per lo sviluppo e il funzionamento di armi e attrezzature militari della Marina, Edizione.32, Vladivostok, TOVMI, 2001. C.268-275.
160. K.V. Jorgenson, B.L. Grose, f.a. Crandal. H. Allegret. Una nuova generazione di cronometri di profilazione acustica. -Oceans-94, vol.1, p.429-434.
161. B.C. Burdico. Analisi dei sistemi idroacustici. Ji. ,Bilbilding navale, 1988, 358 p.
162. T. Lago, P. Eriksson e M. Asman. Metodo Symmiktos: un metodo di stima robusto e accurato per la stima dell'attuale Accustic Doppler. Oceans-93, Vol.2, P.381-386.
163. T. Lago, P. Eriksson e M. Asman. Stima spettrale a breve termine dei dati del misuratore di corrente Doppler ACCOUNT. Ocean-96.
164. H. Susaki. Un algoritmo veloce per la misurazione della frequenza ad alta precisione. Applicazione al sonar Doppler ad ultrasuoni. 0ceans-2000, p. 116-121.
165. H. Susaki. Un algoritmo veloce per la misurazione della frequenza ad alta -accata. Applicazione al sonar Doppler ad ultrasuoni. IEEE Journal Oceanic Engineering, vol.27, no. 1, 2002, P.5-12.
166. Matvienko yu.v., kulinchenko s.i., kuzmin a.b. Accumulo quasicogeneo di segnali di impulsi corti per aumentare la velocità del ritardo di Doppler. In Sat. Tecnologie marine, Vladivostok, Dalnawka, 1998, ISSU.2, P.81-84.
167. Matvienko yu.v., makarov v.n., kulinchenko s.i. , Kuzmin A.v. Ricezione del tratto di impulso Doppler Doppler Doppler brevetto della Federazione Russa №2120131, 1998.
168. Matvienko yu.v., kuzmin A.v. Lag di Doppler sottodimensionato per ANPA. - La quinta conferenza scientifica e tecnica russa "lo stato attuale e i problemi della navigazione e dell'oceanografia" (ma-2004, San Pietroburgo).
169. Matvienko yu.v., nurgaliev r.f., rylebov n.i. Sistema di monitoraggio idroacustico per la posizione del sottomarino autonomo (ANPA). - Ocean Acoustics, Dokl. 9 Shk.-SEM. Acad. Ji.m. Brehov Mosca, 2002, P.347-350.
170. Matvienko Yu.V., Makarov V.n., Nurgaliyev R.F Modulo Navigazione e informazioni Supporto di informazioni ANA. Tez. Dokl. , Tovvmu, Vladivostok, 1998.
171. Zolotarev v.V., Casatkin B.A., Kosarev G.V., Kulinchenko S.I., Matvienko Yu.V. Il complesso idroacostico per l'apparato sottomarino inabitato in acque profonde disabitato. Sabato Lavoro della sessione X di Rao, Mosca, 2000 S.59-62.
172. Ageev MD, Kasatkin B.A., Matvienko Yu.V., Rylov R.N., Rylov N.I. Mezzi idroacustici per la navigazione del robot sottomarino. VIII Interddes. Scuola scientifica. conf. "Moderni metodi e mezzi di ricerca oceanica", Mosca, 2003, parte 2, P.40-41.
173. Ageev MD, Voulin Yu.V., Kiselev Ji.b., Matvienko Yu.V., Rylebov n.i., Shcherbatyuk A.F. Sistemi di navigazione subacquea per ANA. -Viviii interfaccia. Scuola scientifica. conf. "Moderni metodi e mezzi di ricerca oceanica", Mosca, 2003, parte 2, p. 13-22.
Si prega di notare che i testi scientifici presentati sopra sono pubblicati per familiarizzare e ottenuto riconoscendo i testi originali delle tesi (OCR). In questa connessione, possono contenere errori associati all'imperfezione degli algoritmi di riconoscimento. In PDF la dissertazione e gli abstract dell'autore che consegniamo tali errori.


