Zasady konstruowania aktywnych kompleksy hydroakustyczne. i systemy Temat: Pytania: 1) Zasady budowy gazu aktywnego 2) Zasady budowy gazu komunikacyjnego i identyfikacji 3) Zasady budowy Ministanda Gaz Cel edukacyjny: 1. Badanie zasad konstruowania gazu aktywnego 2. zbadaj zasady pracy na schematach strukturalnych aktywnego gazu II. Cel edukacyjny 1. Aktywacja działań kadetów poznawczych. 2. Tworzenie kadetów umiejętności metodycznych (KMN) i umiejętności edukacyjnych (NVR). jeden
 Literatura: 1. Standardy państwowe ZSRR i Federacji Rosyjskiej. Gost 2. Ujednolicony system dokumentacji projektowej (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Maszyny hydroakustyczne statku: stan i rzeczywiste problemy. - Petersburg. : Nauka, 2004. - 410 p. 177 IL. 4. I. V. Solovyov, G. N. Korolkov, A. A. Barangenko i inni. Sea Radio Electronics: Katalog. - Petersburg. : Politechniczna, 2003. - 246 p. : Il. 5. G. I. Kazantesv, G. G. Kotov, V. B. Lokshin i in. Tutorial Headrociousience. - m.: Wojsko. Edytować. 1993. 230 s. Il. 2.
Literatura: 1. Standardy państwowe ZSRR i Federacji Rosyjskiej. Gost 2. Ujednolicony system dokumentacji projektowej (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Maszyny hydroakustyczne statku: stan i rzeczywiste problemy. - Petersburg. : Nauka, 2004. - 410 p. 177 IL. 4. I. V. Solovyov, G. N. Korolkov, A. A. Barangenko i inni. Sea Radio Electronics: Katalog. - Petersburg. : Politechniczna, 2003. - 246 p. : Il. 5. G. I. Kazantesv, G. G. Kotov, V. B. Lokshin i in. Tutorial Headrociousience. - m.: Wojsko. Edytować. 1993. 230 s. Il. 2.
 W zależności od sposobu uzyskania informacji hydroakustycznych (zgodnie z metodą stosowania energii), systemy hydroakustyczne są podzielone na aktywne systemy hydroakustyczne A) pasywne systemy hydroakustyczne aktywny system hydroakustyczny (środki) - urządzenie, które tworzy i emituje sygnały hydroakustyczne w wodnym Środowisko i na granicach jej partycji, akceptuje odbite lub emitowane sygnały z obiektów podwodnych i powierzchniowych. Równoważne warunki aktywnego układu hydroakustycznego są aktywne hydrolenty, usuwanie echo, lokalizację echa lub po prostu hydrolowanie).
W zależności od sposobu uzyskania informacji hydroakustycznych (zgodnie z metodą stosowania energii), systemy hydroakustyczne są podzielone na aktywne systemy hydroakustyczne A) pasywne systemy hydroakustyczne aktywny system hydroakustyczny (środki) - urządzenie, które tworzy i emituje sygnały hydroakustyczne w wodnym Środowisko i na granicach jej partycji, akceptuje odbite lub emitowane sygnały z obiektów podwodnych i powierzchniowych. Równoważne warunki aktywnego układu hydroakustycznego są aktywne hydrolenty, usuwanie echo, lokalizację echa lub po prostu hydrolowanie).
 Aktywny wodór - metoda wykrywania i określenia właściwości obiektów podwodnych w oparciu o promieniowanie sygnałów hydroakustycznych w środowisku wodnym, a także odbiór i przetwarzanie sygnałów echa, które powstają w wyniku refleksji (lub rozpraszania) fale akustyczne. z obiektów podwodnych. Środki hydroakustyczne (systemy) zapewniające aktywną hydrolitykę nazywane są węglowodorowi, stacje wodorowe (GLS) lub ścieżki hydrolerium (CH), ścieżki usuwania ECHO (EP) i pomiarów odległości (ID) dla gazu. Zwykle w ramach GLAS rozumienia systemy przeznaczone do wykrywania i pomiaru odległości do PL i innych ważnych obiektów podwodnych
Aktywny wodór - metoda wykrywania i określenia właściwości obiektów podwodnych w oparciu o promieniowanie sygnałów hydroakustycznych w środowisku wodnym, a także odbiór i przetwarzanie sygnałów echa, które powstają w wyniku refleksji (lub rozpraszania) fale akustyczne. z obiektów podwodnych. Środki hydroakustyczne (systemy) zapewniające aktywną hydrolitykę nazywane są węglowodorowi, stacje wodorowe (GLS) lub ścieżki hydrolerium (CH), ścieżki usuwania ECHO (EP) i pomiarów odległości (ID) dla gazu. Zwykle w ramach GLAS rozumienia systemy przeznaczone do wykrywania i pomiaru odległości do PL i innych ważnych obiektów podwodnych

 Schemat odzwierciedlający zasadę wykrywania i określenie odległości do celu odbioru odzwierciedlonego G / A promieniowanie sygnału G / A D \u003d CT / 2 Odbicie G / A sygnał
Schemat odzwierciedlający zasadę wykrywania i określenie odległości do celu odbioru odzwierciedlonego G / A promieniowanie sygnału G / A D \u003d CT / 2 Odbicie G / A sygnał
 R Dróg nadawczy (generator) A D UWAGA SYSTEM SYSTEM SYSTEM SYSTEM SYSTEM SYSTEM SYSTEMOWY BUL B w systemie zasilania A B C D E E E Eformacyjne CHARAKTERYSTYKA ANTENNA PRZEMYŚCIA REMOCZNE (urządzenie odbiorowe) E Odległość D \u003d (C · t) / 2 Anteny akustycznej recepcji
R Dróg nadawczy (generator) A D UWAGA SYSTEM SYSTEM SYSTEM SYSTEM SYSTEM SYSTEM SYSTEMOWY BUL B w systemie zasilania A B C D E E E Eformacyjne CHARAKTERYSTYKA ANTENNA PRZEMYŚCIA REMOCZNE (urządzenie odbiorowe) E Odległość D \u003d (C · t) / 2 Anteny akustycznej recepcji

 Akustyczna antena (AA) ma na celu konwertowanie energii elektrycznej do akustycznego iz powrotem. Urządzenia wejściowe służą do wstępnego wzmocnienia odebranych sygnałów, a także do przełączania anteny akustycznej z urządzeniami generatorów i odbierających. Generator tworzy impulsy promieniowania określone parametry. Odbierające kanały ścieżki wykrywania rozwiązują problemy z wykrywaniem podwodnych obiektów i szorstkiej definicji ich współrzędnych. Kanały wyjaśnienia współrzędnych są przeznaczone do dokładnego określenia współrzędnych obiektów podwodnych, a następnie wydawanie ich do systemu kontroli broni.
Akustyczna antena (AA) ma na celu konwertowanie energii elektrycznej do akustycznego iz powrotem. Urządzenia wejściowe służą do wstępnego wzmocnienia odebranych sygnałów, a także do przełączania anteny akustycznej z urządzeniami generatorów i odbierających. Generator tworzy impulsy promieniowania określone parametry. Odbierające kanały ścieżki wykrywania rozwiązują problemy z wykrywaniem podwodnych obiektów i szorstkiej definicji ich współrzędnych. Kanały wyjaśnienia współrzędnych są przeznaczone do dokładnego określenia współrzędnych obiektów podwodnych, a następnie wydawanie ich do systemu kontroli broni.
 Systemy półautomatycznego wsparcia celów umożliwiają wykonanie wsparcia dla celów w trybie półautomatycznym z automatycznym usuwaniem współrzędnych prądu. Kanał słuchania umożliwia słuchanie otrzymanych sygnałów plotek do klasyfikacji kontaktu hydroakustycznego z bramką. System wyświetlacza jest urządzeniem wyjściowym i jest niezbędny do wyświetlania wyświetlania informacji i usuwania danych docelowych. System zarządzania i synchronizacji jest łącznikiem pomiędzy wszystkimi urządzeniami i systemami GRS.
Systemy półautomatycznego wsparcia celów umożliwiają wykonanie wsparcia dla celów w trybie półautomatycznym z automatycznym usuwaniem współrzędnych prądu. Kanał słuchania umożliwia słuchanie otrzymanych sygnałów plotek do klasyfikacji kontaktu hydroakustycznego z bramką. System wyświetlacza jest urządzeniem wyjściowym i jest niezbędny do wyświetlania wyświetlania informacji i usuwania danych docelowych. System zarządzania i synchronizacji jest łącznikiem pomiędzy wszystkimi urządzeniami i systemami GRS.
 Wbudowane urządzenie szkoleniowe (Vucu) ma na celu opracowanie umiejętności operatora przez cel, a także umiejętności w zakresie zarządzania GLS w różnych trybach. Wbudowany system automatycznego sterowania (ACC) umożliwia sterowanie głównym specyfikacja techniczna Gls, zidentyfikuj jego błędy. GLS jest zawarty w operacji, dostarczając napięcia zasilania wszystkim urządzeniom, stacja ma osłonę dystrybucyjną, na której wyświetlany jest system sterowania systemu zasilania.
Wbudowane urządzenie szkoleniowe (Vucu) ma na celu opracowanie umiejętności operatora przez cel, a także umiejętności w zakresie zarządzania GLS w różnych trybach. Wbudowany system automatycznego sterowania (ACC) umożliwia sterowanie głównym specyfikacja techniczna Gls, zidentyfikuj jego błędy. GLS jest zawarty w operacji, dostarczając napięcia zasilania wszystkim urządzeniom, stacja ma osłonę dystrybucyjną, na której wyświetlany jest system sterowania systemu zasilania.
 Zgodnie z metodą przeglądu obszaru Water of Circular Review (KO) 360 Recenzja sektora (CO) 25 0 Recenzja spotkania (Sho) 0 360 Recenzja sektora sektorowego (ssho) 0 120 AA 0 AA 120 0 120 AA 120 0 0.
Zgodnie z metodą przeglądu obszaru Water of Circular Review (KO) 360 Recenzja sektora (CO) 25 0 Recenzja spotkania (Sho) 0 360 Recenzja sektora sektorowego (ssho) 0 120 AA 0 AA 120 0 120 AA 120 0 0.


 Figa. 4. Widok wskaźnika z spiralnym ryżem skanowania. 9. Wyświetl znaki z celów na wskaźniku z ryżem skanowania linii. 5. Widok wskaźnika z ryżem skanowania linii. 10. Widok wskaźnika z dzwonkami i odległościami
Figa. 4. Widok wskaźnika z spiralnym ryżem skanowania. 9. Wyświetl znaki z celów na wskaźniku z ryżem skanowania linii. 5. Widok wskaźnika z ryżem skanowania linii. 10. Widok wskaźnika z dzwonkami i odległościami



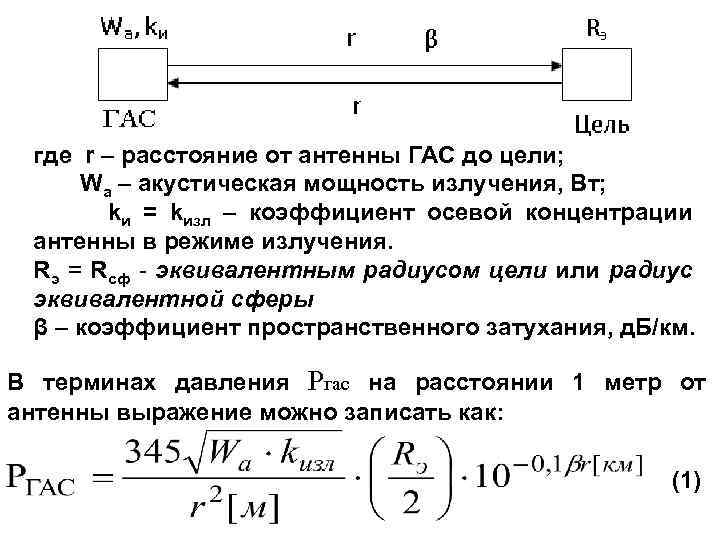 gdzie r jest odległością od anteny gazowej do celu; WA - moc akustyczna promieniowanie, W; Ki \u003d Kizl - współczynnik stężenia osiowego anteny w trybie promieniowania. Re \u003d RSF - równoważny promień docelowy lub promień równoważnej sfery β jest współczynnikiem tłumienia przestrzennego, d. B / km. Pod względem presji RGA w odległości 1 metra z anteny, wyrażenie może być zapisane jako: (1)
gdzie r jest odległością od anteny gazowej do celu; WA - moc akustyczna promieniowanie, W; Ki \u003d Kizl - współczynnik stężenia osiowego anteny w trybie promieniowania. Re \u003d RSF - równoważny promień docelowy lub promień równoważnej sfery β jest współczynnikiem tłumienia przestrzennego, d. B / km. Pod względem presji RGA w odległości 1 metra z anteny, wyrażenie może być zapisane jako: (1)
 Definiujemy poziom sygnału echa z celu względem poziomu zerowego p 0, stosując relację (1) i Prologate IT za pomocą algorytmu dziesiętnego: Wprowadzamy notację: - poziom sygnału echa w punkcie Układ anteny gazowej w d. b; - poziom promieniowania w d. b; - Jest to wartość wyrażona w d. B i charakteryzująca odbiwalność obiektu.
Definiujemy poziom sygnału echa z celu względem poziomu zerowego p 0, stosując relację (1) i Prologate IT za pomocą algorytmu dziesiętnego: Wprowadzamy notację: - poziom sygnału echa w punkcie Układ anteny gazowej w d. b; - poziom promieniowania w d. b; - Jest to wartość wyrażona w d. B i charakteryzująca odbiwalność obiektu.
 PR - Standardowe straty w propagacji, w d. B, biorąc pod uwagę osłabienie sygnału, gdy propaguje się z anteny gazu do celu, a tył z uwzględnieniem sferycznego prawa dystrybucji. Biorąc pod uwagę wprowadzone oznaczenia, wyrażenie przyjmuje formularz: NGAS \u003d UI + CC - 2 PR (2) o wzorze (2) służy do oszacowania poziomu sygnału echa z celu w punkcie odbioru w jednorodnej nieograniczonej środowisko bez zakłóceń.
PR - Standardowe straty w propagacji, w d. B, biorąc pod uwagę osłabienie sygnału, gdy propaguje się z anteny gazu do celu, a tył z uwzględnieniem sferycznego prawa dystrybucji. Biorąc pod uwagę wprowadzone oznaczenia, wyrażenie przyjmuje formularz: NGAS \u003d UI + CC - 2 PR (2) o wzorze (2) służy do oszacowania poziomu sygnału echa z celu w punkcie odbioru w jednorodnej nieograniczonej środowisko bez zakłóceń.
 Biorąc pod uwagę przetwarzanie sygnału użytkowego RGA \u003d PC i zakłóceń w RP w gazie, i biorąc pod uwagę współczynnik rozpoznawania Δ, można nagrać następującą ekspresję RGA \u003d PC \u003d Δ RP równania zakresu energetycznego CH (EE): \u003d gdzie k jest współczynnikiem stężenia osiowego anteny; ΔF - pasmo częstotliwości (zakres) ścieżki recepcji gazu, Hz; F 0 to średnia częstotliwość zakresu, do. Hz; β \u003d 0, 036 f 03/2 [k. Hz] - Współczynnik tłumienia przestrzennego, d. B / km.
Biorąc pod uwagę przetwarzanie sygnału użytkowego RGA \u003d PC i zakłóceń w RP w gazie, i biorąc pod uwagę współczynnik rozpoznawania Δ, można nagrać następującą ekspresję RGA \u003d PC \u003d Δ RP równania zakresu energetycznego CH (EE): \u003d gdzie k jest współczynnikiem stężenia osiowego anteny; ΔF - pasmo częstotliwości (zakres) ścieżki recepcji gazu, Hz; F 0 to średnia częstotliwość zakresu, do. Hz; β \u003d 0, 036 f 03/2 [k. Hz] - Współczynnik tłumienia przestrzennego, d. B / km.
 Gaz na gazie Antenna PN UI PR SK Up Pop Ontd Englic W prawo Wynajem na opłaty CHA (EP) w formie symbolicznej można zarejestrować (biorąc pod uwagę znak "-") jako: EP \u003d - (Ui + SC - Up - PO + PN) \u003d 2 PR EP \u003d UE (poziom interferencji) \u003d
Gaz na gazie Antenna PN UI PR SK Up Pop Ontd Englic W prawo Wynajem na opłaty CHA (EP) w formie symbolicznej można zarejestrować (biorąc pod uwagę znak "-") jako: EP \u003d - (Ui + SC - Up - PO + PN) \u003d 2 PR EP \u003d UE (poziom interferencji) \u003d
 Oprogramowanie (próg detekcyjny) \u003d mon (kierunek wskaźnik) \u003d gazowy gaz: - pomiary odległości gazu - komunikacja gazowa - gaz gazowy - ministance gazu - gaz torped deets - gaz rozległy zasilacze i dodatkowe gaz - gaz oświetlenia i rozwój - hydroakustyczny Lags - Przegląd boczny gazu
Oprogramowanie (próg detekcyjny) \u003d mon (kierunek wskaźnik) \u003d gazowy gaz: - pomiary odległości gazu - komunikacja gazowa - gaz gazowy - ministance gazu - gaz torped deets - gaz rozległy zasilacze i dodatkowe gaz - gaz oświetlenia i rozwój - hydroakustyczny Lags - Przegląd boczny gazu

 Uzbrojenie hydroakustycznego NK składa się z: Øgak MGK-335 "Platinum" - kompleks hydroaktyczny wykrywania, kierowania i komunikacji; Øgak MGK-345 "Bronze" - kompleks hydroakustyczny wykrywania, kierowania i komunikacji; Øgak MGK-355 "Polynom" jest kompleksem hydroakustycznym wykrywania PL oraz wydawanie docelowego oznaczenia broni podwodnych; Ø Tagi MG-332 "Argun", gaz Mg-332 T "Argun-T" - stacja hydroakustyczna wykrywania i kierowania na antyczne statki; Ø Tagi Mg-329 "OK", gaz Mg-329 m "OKA-M" - obniżona stacja hydroakustyczna; Ø Tagi MG-339 "Stument" lub gaz Mg-339 T "Schend-T" - stacja wykrywania hydroakustyczna, określenie współrzędnych, komunikacji i identyfikacji;
Uzbrojenie hydroakustycznego NK składa się z: Øgak MGK-335 "Platinum" - kompleks hydroaktyczny wykrywania, kierowania i komunikacji; Øgak MGK-345 "Bronze" - kompleks hydroakustyczny wykrywania, kierowania i komunikacji; Øgak MGK-355 "Polynom" jest kompleksem hydroakustycznym wykrywania PL oraz wydawanie docelowego oznaczenia broni podwodnych; Ø Tagi MG-332 "Argun", gaz Mg-332 T "Argun-T" - stacja hydroakustyczna wykrywania i kierowania na antyczne statki; Ø Tagi Mg-329 "OK", gaz Mg-329 m "OKA-M" - obniżona stacja hydroakustyczna; Ø Tagi MG-339 "Stument" lub gaz Mg-339 T "Schend-T" - stacja wykrywania hydroakustyczna, określenie współrzędnych, komunikacji i identyfikacji;
 Ø Tagi Mg-79 lub gaz Mg-89 "Sulna" - stacja hydroakagatyczna wykrywania kotwicy i dolnych kopalń; Ø Tagi Mg-7 "Bransoletka" i gaz Mg-737 "AMULET-3" - stacja hydroakustyczna odkrycia podwodnych sabotażowych sił i środków; Øgas mg-26 "host" lub gaz Mg-45 "Backgammon" - sprzęt hydroaktyczny i identyfikacyjny. Ø Tagi KMG-12 "Cassandra" - instrument klasyfikacji celów do stacji wodnych statków powierzchniowych, gdy działają w trybie aktywnym. Ø Tagi Mg-409 C jest systemem pasywnego wykrywania hydroakustycznego Buto. Ø Tagi "Altyn" - Sprzęt do pomiaru pionowego rozkładu prędkości dźwięku w wodzie z statku powierzchniowego; Øgas Mi-110 km - Przyrząd do wykrywania śladu ustalającego APL.
Ø Tagi Mg-79 lub gaz Mg-89 "Sulna" - stacja hydroakagatyczna wykrywania kotwicy i dolnych kopalń; Ø Tagi Mg-7 "Bransoletka" i gaz Mg-737 "AMULET-3" - stacja hydroakustyczna odkrycia podwodnych sabotażowych sił i środków; Øgas mg-26 "host" lub gaz Mg-45 "Backgammon" - sprzęt hydroaktyczny i identyfikacyjny. Ø Tagi KMG-12 "Cassandra" - instrument klasyfikacji celów do stacji wodnych statków powierzchniowych, gdy działają w trybie aktywnym. Ø Tagi Mg-409 C jest systemem pasywnego wykrywania hydroakustycznego Buto. Ø Tagi "Altyn" - Sprzęt do pomiaru pionowego rozkładu prędkości dźwięku w wodzie z statku powierzchniowego; Øgas Mi-110 km - Przyrząd do wykrywania śladu ustalającego APL.
 Figa. 1. Projekt Rocket Cruiser 1164 W służbie projektu 1164 Broń hydroakustyczna: Q GAK MGK-335 "Platinum"; Q Gas Mg-7 "Bransoletka" - 2 zestawy; Q Gas Mg-737 "Amulet-3"; Q Gas KMG-12 "Cassandra". Istnieje następujące
Figa. 1. Projekt Rocket Cruiser 1164 W służbie projektu 1164 Broń hydroakustyczna: Q GAK MGK-335 "Platinum"; Q Gas Mg-7 "Bransoletka" - 2 zestawy; Q Gas Mg-737 "Amulet-3"; Q Gas KMG-12 "Cassandra". Istnieje następujące
 Figa. 2. Duży statek przeciwwybleniowy projektu 1155 (1155. 1) Następujące uzbrojenie hydroakustyczne jest w służbie z projektem 1155: GAK MGK-335 "Platinum"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gus "Altyn"; Gaz MI-110 km. W służbie projektu 1155. 1 jest następującą bronią hydroakustyczną: GAK MGK-355 "POLIN"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gus "Altyn"; Gaz MI-110 km.
Figa. 2. Duży statek przeciwwybleniowy projektu 1155 (1155. 1) Następujące uzbrojenie hydroakustyczne jest w służbie z projektem 1155: GAK MGK-335 "Platinum"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gus "Altyn"; Gaz MI-110 km. W służbie projektu 1155. 1 jest następującą bronią hydroakustyczną: GAK MGK-355 "POLIN"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gus "Altyn"; Gaz MI-110 km.
 Figa. 3. Projekt Statek 956. Klasa: Statek Rakietowy-Artyleria, podklasa: misja podziewowa. 1 ranking w służbie projektu 956 jest następującą bronią hydroakustyczną: GAK MGK-355 "POLIN"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gazg-12 "Cassandra".
Figa. 3. Projekt Statek 956. Klasa: Statek Rakietowy-Artyleria, podklasa: misja podziewowa. 1 ranking w służbie projektu 956 jest następującą bronią hydroakustyczną: GAK MGK-355 "POLIN"; Gaz Mg-7 "Bransoletka" - 2 zestawy; Gazg-12 "Cassandra".
 Figa. 4. Projekt Rocket Boat 1241. 2 W służbie projektu 1241. 2 Istnieje następująca broń hydroakustyczna: GAK MGK-345 "BRONZE"; Gaz Mg-45 "Backgammon";
Figa. 4. Projekt Rocket Boat 1241. 2 W służbie projektu 1241. 2 Istnieje następująca broń hydroakustyczna: GAK MGK-345 "BRONZE"; Gaz Mg-45 "Backgammon";
 Figa. 5. Łódź cierpitkowa projektu 1241 W służbie projektu 1241 jest następująca broń hydroakustyczna: GAK MGK-345 "BRONZE"; Gaz Mg-45 "Backgammon";
Figa. 5. Łódź cierpitkowa projektu 1241 W służbie projektu 1241 jest następująca broń hydroakustyczna: GAK MGK-345 "BRONZE"; Gaz Mg-45 "Backgammon";
 Figa. 6. Mały statek antywybokowy projektu 1124 w służbie projektu 1124 istnieje następująca broń hydroakustyczna: gaz Mg-339 "Stument" lub gaz Mg-339 t "Schend-T"; Niektóre projekty są uzbrojone w GAC MGK-335 "Platinum"; Gaz Mg-322 "Argun" lub gaz Mg-322 T "Argun-T"; Gaz mg-329 "Oka" lub gaz Mg-329 m "OKA-M"; Gaz Mg-26 "host" lub gaz Mg-45 "Backgammon"; Gazg-12 "Cassandra". Gaz Mg-409 S.
Figa. 6. Mały statek antywybokowy projektu 1124 w służbie projektu 1124 istnieje następująca broń hydroakustyczna: gaz Mg-339 "Stument" lub gaz Mg-339 t "Schend-T"; Niektóre projekty są uzbrojone w GAC MGK-335 "Platinum"; Gaz Mg-322 "Argun" lub gaz Mg-322 T "Argun-T"; Gaz mg-329 "Oka" lub gaz Mg-329 m "OKA-M"; Gaz Mg-26 "host" lub gaz Mg-45 "Backgammon"; Gazg-12 "Cassandra". Gaz Mg-409 S.
 Figa. 7. Podstawowa przyczepa Projekt BTSCH 1265 (Ave. 260, 270) w służbie projektu 1265 zawiera następujące bronie hydroakustyczne: gaz Mg-79 lub gaz Mg-89 "Sulna"; Gus "Kabarga";
Figa. 7. Podstawowa przyczepa Projekt BTSCH 1265 (Ave. 260, 270) w służbie projektu 1265 zawiera następujące bronie hydroakustyczne: gaz Mg-79 lub gaz Mg-89 "Sulna"; Gus "Kabarga";
 Figa. 8. Duży statek lądujący projektu projektu 775 775 w służbie projektu 775 jest następującą bronią hydroakustyczną: Bransoletka gazowa Mg-7; Gaz Mg-26 "host" lub gaz Mg-45 "Backgammon".
Figa. 8. Duży statek lądujący projektu projektu 775 775 w służbie projektu 775 jest następującą bronią hydroakustyczną: Bransoletka gazowa Mg-7; Gaz Mg-26 "host" lub gaz Mg-45 "Backgammon".
 Stacje hydroakustyczne "Tamir-11" (1953) Gaz do statków powierzchniowych małych przemieszczenia Łączna liczba urządzeń - 17 Mass instrumentów - 1000 kg. Główny projektant Vovochnoe B. N.
Stacje hydroakustyczne "Tamir-11" (1953) Gaz do statków powierzchniowych małych przemieszczenia Łączna liczba urządzeń - 17 Mass instrumentów - 1000 kg. Główny projektant Vovochnoe B. N.
 Hercules Stacje hydroakustyczne (1957) Gaz do statków powierzchniowych o średnim i dużym przemieszczeniu Łączna liczba urządzeń - 30 masowa instrumentów - 5800 kg Główny projektant Umikov Z.n.
Hercules Stacje hydroakustyczne (1957) Gaz do statków powierzchniowych o średnim i dużym przemieszczeniu Łączna liczba urządzeń - 30 masowa instrumentów - 5800 kg Główny projektant Umikov Z.n.
 Stacje hydroakustyczne "Mezen-2" (1963) Wykrywanie gazu z dna min. Całkowita liczba urządzeń Masa instrumentów - 12 - 2100 kg Główny projektant Low Novo I. I.
Stacje hydroakustyczne "Mezen-2" (1963) Wykrywanie gazu z dna min. Całkowita liczba urządzeń Masa instrumentów - 12 - 2100 kg Główny projektant Low Novo I. I.
 Stacje hydroakustyczne "Kashalot" (1963) Gaz do poszukiwania statków zatopionych całkowitej liczby instrumentów - 22 masa instrumentów - 4000 kg (bez zamka) Główny projektant Timokov N. A.
Stacje hydroakustyczne "Kashalot" (1963) Gaz do poszukiwania statków zatopionych całkowitej liczby instrumentów - 22 masa instrumentów - 4000 kg (bez zamka) Główny projektant Timokov N. A.
 Kompleksy hydroakustyczne "RUBIN" (1964) GAK dla wielofunkcyjnych okrętów podwodnych Główny projektant Ayalashka E. I. Łączna liczba urządzeń - 56 Msza masowa instrumentów - 54747 kg
Kompleksy hydroakustyczne "RUBIN" (1964) GAK dla wielofunkcyjnych okrętów podwodnych Główny projektant Ayalashka E. I. Łączna liczba urządzeń - 56 Msza masowa instrumentów - 54747 kg
 Stacje hydroakustyczne "TITAN-2" (1966) GAS DO DUŻYCH ANTYWISTYCZNYCH STATKÓW Łącznych urządzeń Masa instrumentów - 37 - 16000 kg Główny projektant Harat G. M.
Stacje hydroakustyczne "TITAN-2" (1966) GAS DO DUŻYCH ANTYWISTYCZNYCH STATKÓW Łącznych urządzeń Masa instrumentów - 37 - 16000 kg Główny projektant Harat G. M.
 Stacje hydroakustyczne "Argun" (1967) GUS dla małych statków podwodnych Całkowity Urządzenia Masa instrumentów - 30 - 7600 kg z Głównym Projektantem BUSANCHENKO V. P.
Stacje hydroakustyczne "Argun" (1967) GUS dla małych statków podwodnych Całkowity Urządzenia Masa instrumentów - 30 - 7600 kg z Głównym Projektantem BUSANCHENKO V. P.
 Stacje hydroakustyczne "Sulna" (1969) Wykrywanie gazu kotwicy i dolnych kopalni Łączna liczba urządzeń Masa instrumentów - 20 - 3900 kg Designer Lyashenko G. G.
Stacje hydroakustyczne "Sulna" (1969) Wykrywanie gazu kotwicy i dolnych kopalni Łączna liczba urządzeń Masa instrumentów - 20 - 3900 kg Designer Lyashenko G. G.
 Stacje hydroakustyczne "Buk" (1971) Gaz do sądów badawczych Łączna liczba instrumentów Masa instrumentów - 30 - 11.000 kg Główny projektant Klimenko J. P.
Stacje hydroakustyczne "Buk" (1971) Gaz do sądów badawczych Łączna liczba instrumentów Masa instrumentów - 30 - 11.000 kg Główny projektant Klimenko J. P.
 Kompleksy hydroakustyczne "Platinum" (1972) GAK dla statków powierzchniowych medium i dużych przemieszczeń Projektant Klimovitsky L. D. Liczba instrumentów - 64 masa instrumentów - 23 tony
Kompleksy hydroakustyczne "Platinum" (1972) GAK dla statków powierzchniowych medium i dużych przemieszczeń Projektant Klimovitsky L. D. Liczba instrumentów - 64 masa instrumentów - 23 tony
 Kompleksy hydroakustyczne "Polynom" (1979) GAK dla NC dużego przemieszczenia Głównego Designer Soloviev V. G. Całkowita liczba instrumentów - 152 Msza masowa - 72 000
Kompleksy hydroakustyczne "Polynom" (1979) GAK dla NC dużego przemieszczenia Głównego Designer Soloviev V. G. Całkowita liczba instrumentów - 152 Msza masowa - 72 000
 Kompleksy hydroakustyczne "Star-M 1" (1986) Cyfrowy Guck dla NK Bliski Designer Główny Projektant Aleshchenko O. M. Całkowita liczba urządzeń - 64 urządzenia masowe - 23000 kg
Kompleksy hydroakustyczne "Star-M 1" (1986) Cyfrowy Guck dla NK Bliski Designer Główny Projektant Aleshchenko O. M. Całkowita liczba urządzeń - 64 urządzenia masowe - 23000 kg
 Kompleksy hydroakustyczne "Kabarga" (1987) Gus Miniscovers for Marine, Basic and Raid Trails Łączna liczba urządzeń - 42 Masowa instrumentów - 8500 kg Główny projektant Lyashenko G. G.
Kompleksy hydroakustyczne "Kabarga" (1987) Gus Miniscovers for Marine, Basic and Raid Trails Łączna liczba urządzeń - 42 Masowa instrumentów - 8500 kg Główny projektant Lyashenko G. G.
 Kompleksy hydroakustyczne "Star M 1 -01" (1988) Gaz cyfrowy do statków powierzchniowych małych przemieszczeń Główny projektant Aleshchenko O. M. Całkowita liczba urządzeń - 60 Msza masowa instrumentów - 16,500 kg
Kompleksy hydroakustyczne "Star M 1 -01" (1988) Gaz cyfrowy do statków powierzchniowych małych przemieszczeń Główny projektant Aleshchenko O. M. Całkowita liczba urządzeń - 60 Msza masowa instrumentów - 16,500 kg
 Kompleksy hydroakustyczne "Star-2" (1993) Cyfrowy GUCK DO DUŻYCH DUŻYCH DESPARMEMENT DESIGNER BORISENKO N. N. Łączna liczba urządzeń - 127 urządzeń masowych - 77742 kg
Kompleksy hydroakustyczne "Star-2" (1993) Cyfrowy GUCK DO DUŻYCH DUŻYCH DESPARMEMENT DESIGNER BORISENKO N. N. Łączna liczba urządzeń - 127 urządzeń masowych - 77742 kg

 Kompleksy perspektywiczne Corvette Project 12441, który zapewnia instalację gazu "Zarya-2"
Kompleksy perspektywiczne Corvette Project 12441, który zapewnia instalację gazu "Zarya-2"
Sowieci Diesel-Elektryczne podwodne podwodne powojennego budynku Gagin Vladimir Vladimichich
Kompleksy hydroakustyczne PL W walce przeciwwustarskiej
Łodzie napędowe z pierwszych powojennych projektów "Utorowały drogę" dla załóg nowoczesnych okrętów podwodnych, w kampaniach Ocean, zdobywając funkcjonowanie działalności sprzętu wojskowego, opanowanie technik leczonych pływania, studiując sytuację hydrologiczną i hydrograficzną strategicznie ważnych obszarów oceanu, uprawiając taktykę anty-palmary i anty-worer.
Taktyka walki przeciw łodzi podwodnej jest często zredukowana do wyszukiwania i wykrywania orła PL za pomocą środków hydroakustycznych wcześniej niż wroga.
Jednocześnie stan otaczającego medium nabywa najważniejszą wartość, zwłaszcza takie parametry, jak strefy konwergencji akustycznej oraz położenie podwodnego względem "Thermocline".
Strefy konwergencji są obszary w kształcie pierścienia wokół podwodnego statku. Dźwięk kierowany z punktu konwergencji znajdującym się w strefie konwergencji jest załamany w zależności od ciśnienia i temperatury wody, porusza się w górę iw dół względem powierzchni spirali przez nieregularne odstępy, które również zależą od stanu otoczenia środowisko.
Dowódca statku, starając się nie wpaść w te obszary - jak w jego opinii cel jest, może uniknąć wykrycia. Aby to zrobić, musi być w obszarach, w których dźwięk dotyczy jego źródła, jest po prostu promieniowo.
Najprostszym sposobem jest wykonywanie pozycji powyżej warstwy skoku temperatury (termokline) lub pod nią, aby dzieli się okrętami podwodnymi - wówczas dźwięki opublikowane przez jego silnik najprawdopodobniej znajdują się odzwierciedlenie od warstwy, a łódź wroga nie wykryje go .
Leap temperatury jest warstwą graniczną części podwodnej, oddzielając ciepłe powierzchowne wody i chłodniejsze obszary głębokie.
Diesel podwodne podwodne wraz z atomem zajmują widoczne miejsce w agresywnych planach bloku NATO krajów NATO. Według książki referencyjnej "Jane", w połowie 1980 r. W flajach Unii Północnoatlantyckiej, było 186 łodzi dieslowych.
Podwodne podwodne Diesel mają pewne zalety atomowe, są one powiązane, w szczególności, mniej hałas, co poprawia warunki działania stacji hydroakustycznych (gazu) podczas rozwiązywania problemów walki przeciw łodzi podmorskiej.
Obecnie zgodnie z prasą zagraniczną integracja technologii hydroakustycznej z systemami zarządzania BIUS i broni występującej na podstawie szerokiego wykorzystania komputerów. W rezultacie zdolności taktyczne sprzętu hydroakustycznego zmieniły się jakościowo. Właściwość wykrywania celów i klasyfikacji otrzymanego kontaktu wzrosła. Ponadto stało się realne w tym samym czasie, aby monitorować kilka (do sześciu) celów i szybko wykrywać zmiany w ich manewrowaniu, automatycznie uzyskuj informacje i stale rozwiązywać go do wszystkich systemów koniugatu i jasno, w wygodnej aplikacji, aby wyświetlić Ekrany i ekrany oraz w razie potrzeby zarejestruj się.
Przetwarzanie sygnału cyfrowego dozwolone są systemy lokalizacji pasywnych podwodnych w celu określenia tylko hałasu na okaziciela i odległość do niego.
Wreszcie integracja różne systemy. Na podstawie EMM uproszczoną kontrolę nad pracą i utrzymaniem gazu i pozostawia do zmniejszenia personelu serwisowego, co jest ważne dla stosunkowo małego przemieszczenia wody podwodnych diesla.
Głównym przewodem stacji akustycznej jest bez względu na szereg kilkudziesięciu kilometrów. W niskiej częstotliwości (220 Hz - 7 kHz) zakres odbioru sygnału występuje na konformalnym (w połączeniu z częściami ciała obudowy) Akustyczna antena składająca się z hydrof piezoceramicznych, a w wysokiej częstotliwości (8 kHz) - na a Cylindryczna antena z hydrofami ołowiu cyrkonianu, umieszczona w pobliżu Kiel. Antena cylindryczna służy również do śledzenia kilku (do czterech) celów. Oba kanały nadmiarowości szumów uzupełniają się nawzajem. Okoliczna przestrzeń jest pomijana przez szybką konsekwentną ankietę dużej liczby statycznie uformowanych płatków orientacji kierunkowej. Wykryto hałaśliwe cele obierające metodą równoważnej dokładności.
Aktywny przewód umożliwił przeprowadzenie okrągłej przeglądu z omniącym promieniowaniem jednej paczki lub gdy seria działek w kolejno zmieniających się kierunkach, a także emitować pojedyncze paczki w określonym kierunku. Akceptowane sygnały echa są wyświetlane na ekranie wskaźnika i mogą być rejestrowane w celu pomiaru zmiany częstotliwości Dopplera.
Ścieżka pasywnej lokalizacji ma trzy anteny odbierające, zainstalowane równo z obudową w nosowej, środkowej i rufowej, z każdej strony łodzi podwodnej. Biorą cele hałasu, które podlegają przetwarzaniu korelacji, co umożliwia określenie miejsca celu dla trzech linii pozycji z wystarczającą dokładnością. Anteny ścieżki mogą być używane jako dodatkowe usuwanie szumów dla ścieżki.
Stacja zapewnia skierowaną i nieierierską komunikację dźwiękową.
Ścieżka wykrywania sygnału hydroliatorów umożliwia wykrywanie sygnałów impulsowych różnych początków w odległości kilkudziesiąt kilometrów, określają ich częstotliwość, czas trwania i kierunek do źródła sygnału.
W konstrukcji stacji powszechnie stosowane są obwody zintegrowane, dzięki czemu jego wymiary i waga są zmniejszone, zwiększono niezawodność. Dane dotyczące celów są wyświetlane na dwóch ekranach, automatycznie przejdą do AUM Auto-Packer systemu fotografowania torpeda, gdzie są komendy są produkowane do wypalania.
Opracowano prostszą stację hydroakustyczną. Obejmuje normy ścieżki, echa i pasywna lokalizacja. Wyszukiwanie i wykrywanie celów prowadzi się w trybie szumu za pomocą metody korekcji metody przetwarzania sygnału. Po wykryciu celu odległość do niego mierzy się promieniowaniem pojedynczej paczki lub metody pasywnej lokalizacji.
W celu zwiększenia wydajności wykorzystania narzędzi obserwacyjnych hydroakustycznych na okrętach podwodnych instrumenty posiadają również urządzenia do pomiaru prędkości rozmnażania dźwięku w wodzie i sygnalizacji o poglca występowania kawitacji śrub wioślarskich, urządzeń do sterowania poziomem hałasu własnego .
Aby zwiększyć wydajność użytkowania gazu, istnieje urządzenie do konstruowania obrazów promieniowych zgodnie z danymi wejściowymi na rzeczywisty rozkład prędkości rozmnażania dźwięku ze wzrostem głębokości. System jest w stanie funkcjonować w trybie symulatora z symulacją sygnałów wchodzących do wejścia z różnych celów. Wszystkie aktualne informacje wprowadzone do systemu w procesie jego pracy bojowej i produkowane przez nim mogą być rejestrowane w celu późniejszego odtwarzania i analizy. System jest obsługiwany przez jednego lub dwóch operatorów.
Gaz z innych rodzajów ma cylindryczne anteny partycjonowane. W przypadku okrągłej widzenia, 96 płatków wzoru promieniowania są utworzone statycznie.
Określenie współrzędnych wykrytych celów i śledzenia jednocześnie prowadzi się we wszystkich trybach za pomocą komputera. W trybie aktywnym, aby uzyskać maksymalny zakres działań, jest on przewidziany do koordynacji parametrów promieniowania (energia emitowana, częstotliwość, rodzaj modulacji przesyłki) z rzeczywistych warunków hydrologicznych w obszarze obserwacyjnym.
W trybie wykrywania sygnałów. Hydrolocatory są określane przez łożysko na źródle sygnału, jego częstotliwości i amplitudy, czas trwania impulsów, częstotliwości ich następujących i klasyfikować źródła promieniowania wzdłuż całości wszystkich tych funkcji.
Stacja może również pracować w trybach pomocniczych: symulatorze, wstawienia i automatycznej kontroli stanu technicznego, który zapewnia wykrywanie wadliwych modułów.
Wszystkie elementy sterujące i dwa ekrany znajdują się na konsoli gazowej. Na jednym z nich z wskazaniem tricolor, który reprezentuje wskaźnik przeglądu kołowego, jednocześnie wyświetlany w części centralnej. Pełne ustawienie ze swoim statkiem w centrum i kołowej skali dzwonów, a na krawędziach - kompletne informacje o tekście o towarzyszących celach ( Odległości, na okaziciela, wartości zmiany częstotliwości Dopplera, kursy, prędkości), dane dotyczące kursu i prędkości twojego statku, o trybie i parametry pracy gazu. Tekstowe macierze hierarchiczne są wyświetlane na drugim ekranie, którego przetwarzanie umożliwia optymalizację procesu sterowania sprzętem. Taka prezentacja informacji znacznie upraszcza usługę i działanie stacji i pozwala na wykonanie tego jednego operatora.
W listopadzie 1983 r. Victor-III APL otrzymał zadanie, aby usunąć hałas i inne cechy czwartej rakiety typu American Ohio.
Według załogi młody ambitny kapitan naszej łodzi podwodnej, zainspirowany przykładami podwodnych bohaterów wojny patriotycznej, postanowili prawie iść do zatoki bazy Sugostite.
Do przebrania akustycznego K-324 w Morzu Sargasso pojawiło się pod małym statkiem, który nastąpił odpowiedni kurs. Wszystko poszło dobrze, tak nagle szybkość naszego PL. Zaczął szybko spadać, pomimo wzrostu turbiny zmienia się do maksimum.
Brak wyzwalania i domysły załogi do pozytywnych wyników LED - prędkość spadła do trzech węzłów.
Możemy coś zrobić - musiałem unosić się. Pamiętaj niemal na uwadze banki amerykańskie, w samym "Lair", więc mówić.
W celu kontroli śruby głównej, zbiorniki nosowe wypełniły się, łódź nabyła przyzwoitą różnicę na nosie i zespołu awaryjnym, uzbrojony w dwa "Kalashnikov" i dwie pm (wszystkie arsenalne istniejące na łodzi podwodnej) zbadano paszę część. Tak więc, niektóre kabel okazały się nawinięte na wale, bardzo trwałe, nie wychodząc, ani automatyczne koleje: wszystkie wysiłki były próżne.
Dowódca przyjął decyzję - przejść na Kubę w pozycji nocnej. To wtedy jej i schwytani amerykańscy piloci, żeglarze i turystów na jachcie przyjemności.
Z żalem na pół do Kuby, Delzli. Dowódca natychmiast zadzwonił do "dywan". Ale wbrew, w przeciwieństwie do smutnych założeń dotyczących jego losu, kapitana "na koniu" powrócił, rana kapitana na śrubę przez desperackiego podwodnego została zwrócona, okazała się niczym więcej niż najnowszą amerykańską anteną hydroakustyczną, że nieostrożni Amerykanie zostały przetestowane nieprzyjemny statek.
Nasi naukowcy i technologowie otrzymali nieocenione materiały do \u200b\u200bzbadania ...

Emergency PL K-324 w Morzu Sargasso
Z książki bitwy dla gwiazd-2. Konfrontacja przestrzeni (część II) Autor Perhearsh anton ivanovich.Combat Kompleksy orbitalne dla "Burana" Pamiętamy, że kompleks rakiety energetycznej i przestrzeniowej powstał na wniosek Ministerstwa Obrony, aby rozwiązać problemy wojskowe w bliskiej przestrzeni. Jasne jest, że w tym samym czasie złożone obciążenia zostały opracowane z kompleksem
Z zarządzania jakością książki Autor Shevchuk Denis Aleksandrovich.1.2. Zarządzanie jakością jako czynnik sukcesu przedsiębiorstwa w konkurencyjnej gospodarce walki walki jako jeden z najważniejszych cech Obejmuje konkurencję między przedmiotami a obiektami rynkowymi. W ramach konkurencji rozumie rywalizację między jednostkami lub
Z książki statków wojennych świata na przełomie XX - XXI wieku, część III FRIGATES Autor Apalkov Yuri Valentinovich.USA Systemy anty-samolotów Systemy rakietowe i główny TTX "Standardowy * SM-1" Standard "SM-2 MK 57 NATO" Wróbel morski "" Sea Chapparel "Country Developer USA General Dinamics Corporation, Division Air Defense USA General Dinamics Corporation, Air Defense Division USA. Systemy elektroniczne NATO Raitheon, Hughes Systemy rakietowe firmy USA Lockheed Martin Aeronutronic
Z książek radzieckich elektrycznych elektrycznych podwodnych podwozia powojennej konstrukcji Autor Gagin Vladimir Vladimirovich.Anti-Submarine Complexile Skład i główny TTX "MASEL" "Floor-B" "Wodospad" "Medveda" ASROC CY-1 MILASTRASTRASTRASTTRANTURE Firmy Rosji Raduboga Rosja "Novator" Rosja "Martineekheni-Ka" US Lockheed Martin Tactical Defense Systems Chiny Comtiec adopcja Gie Milas.
Z książki. Krajowa broń rakietowa Autor Po pierwsze, Mikhail AndreevichNiektóre aspekty siły podwodnych podwodnych pod wodą Siły po II wojnie światowej podlegały podstawowych zmian jakościowych. Okręty podwodne obróciły się od nurkowania w prawdziwie podwodnych statkach, autonomii, głębokości zanurzeniowej, prędkości i zakresu
Z książki. Krajowe kompleksy antystanowe Autor Angel Rostislav Dmitrievich.Land Anti-Aircraft Systems Ractive R-101R -101 (P-102) Ekspercyjna rakieta sterowana przeciwlotnicze. Wyposażony w ulgę. Zaprojektowany w drugiej połowie 40s. W NII-88 na podstawie niemieckiego trofeum anty-samolotu pocisku "Wasserfal". Testy miały miejsce w 1948 r. Główny projektant - Eugene
Z książki Secret Cars of Radzieckiej Armii Autor Kochnew Evgeniy Dmitrievich.Systemy rakiet przeciwlotniczych morskich B-753 "Volkhov" M-2. B-753 (13dm) Eksperymentalny kompleks pocisku antyoterminowego M-2 z dwuetapową rakietą sterowaną wyposażoną w Marshus EDD i rozpoczynając RDTT. Stworzony na podstawie SPC Land S-75. Kompleksowy programista - CKB
Z lotnictwa książki w lokalnych wojnach przez Babich V.K.Przenośne systemy przeciwlotnicze "Igła" (zdjęcia z magazynu "Wojskowa parada") "Strela-2" "Strela-2m" "Strela-2" 9k32. 9m32 Przenośny kompleks rakietowy 9k32 z kontrolowanym rakietą górniczą paliwową. Pierwsze krajowe przenośne SPC. Zaprojektowany
Z książki Elektroniczne domowe Kashkarov A. P. P.Kompleksy antyraktetyczne A. B-1000OPPED (wielokąt) system obrony przeciwrakietowej "A" z obroną pocisków w 1000. Pierwszy system krajowy Pro. Został wdrożony w Sarah Shagan Wielokąt. Zapewnił klęskę jednego monobloku pocisku balistycznego o średnim zakresie.
Z książki metalowej wieku Autor Nikolaev Grigory Ilyich.Kompleksy antykoziomowe drugiej generacji "Fagot" przyjęte w 1963 r. Kompleks Anti-Tank Maltka odpowiedział głównie do wymogów wojsk, aw przyszłości pozytywnie udowodniono samą skuteczną bronią podczas lokalnych wojen. Jednak i
Z ewolucji książek systemów antywybokowych statków domowych przez Kazakin Leonid.Systemy przeciwrakietnikowe w latach dziewięćdziesiątych w środku lat osiemdziesiątych, wraz z pracą nad modernizacją wcześniej utworzonych kompleksów przeciwpancernych, skierowanych głównie do zapewnienia możliwości pokonania nowoczesnych celów z podniesioną
Z książki autoraRuchome kompleksy rakietowe i artyleryjskie Pierwszy wyrzutnia BR-264 do montażu na podwozie samochodowym powstała w zakładzie barykady we wrześniu 1961 r. I była częścią eksperymentalnej PCC 9K71 "TEMP" z rakietą paliwową 9m71, która została opracowana
Z książki autora3. W walce o przetrwanie w lokalnych wojnach, jak zauważono, wskaźnik przetrwania oceniano przez zagranicznych ekspertów pod względem straty - stosunek liczby statków samolotów w dół do liczby rozmieszczonych odlotów samolotów. Na przykład poziom straty eskadry taktycznej,
Z książki autora4.8.2. Skuteczne techniki walki z ingerencją w walkę z hałasem przebiegającym przez linię, najlepiej łączyć liniowe filtry RF i supresorory procesów przejściowych w linii AC. Metoda ta można osiągnąć o 60 ingerencji DB na częstotliwości
Z książki autoraRozdział 1. W walce z korozją nauki metali na świecie nie ma nic wiecznego - wszyscy wiedzą tę prawdę bez opieki przez długi czas. To, co wydaje się na zawsze niezachwiane - góry, granitowe bloki, całe kontynenty, - ostatecznie zniszczone, rozrzucone w pył, idź pod wodą, wpadnij w głębiny.
Z książki autoraWymieniono już kompleksy rakietowe przeciwległe podwodne, wraz z pojawieniem się okrętów podwodnych jądrowych w latach 50., wymagane są nowe systemy broni, zdolne do uderzonych celów podwodnych w dużym zakresie. W ZSRR praca w tym kierunku została uruchomiona zgodnie z
W dającej się przewidzieć przyszłej przyszłości, statki podwodne i samoloty antyadwodowe rosyjskiej marynarki wojennej będą musiały uzyskać systemy hydroakustyczne nowego typu. Zgodnie z najnowszymi raportami, do końca dekady, departament wojskowy zamierza nabyć dużą liczbę środków śledzenia dla sytuacji podwodnej. Takie zakupy pozwolą wyposażyć nowoczesne środki wykrywania wielu w budowie lub zmodernizowanych okrętach podwodnych, samolotów itp.
Pod koniec marca nowy porządek został umieszczony na oficjalnej stronie internetowej zamówień państwa przez Ministerstwo Obroty w odniesieniu do dalszego rozwoju materialnej części marynarki wojennej. Według opublikowanych informacji o przetargach Ministerstwo planuje zakup 55 kompleksów hydroakustycznych (GAK) rodziny MHK-335EM-03 "KREAKVA" w różnych modyfikacjach. W celu zakupu wszystkich wymaganych produktów dział wojskowy spędza nie więcej niż 194,6 mln rubli - średnio ponad 5,3 mln na kompleks. Pierwsze kompleksy w ramach przyszłego zamówienia muszą być dostarczane już w tym roku. Zakończenie dostaw jest zaplanowane na 2019 rok.
Ogólny schemat kompleksu MGK-335EM-05
Zgodnie z opublikowanymi danymi siłami zbrojnymi zamierzają kupić kompleksy "KRYAKVA" z trzech modyfikacji, które pozwolą im wyposażyć okręty podwodne, samoloty przeciwległe podwodne i systemy stacjonarne. W przypadku siły podwodnych zakupiono 16 kompleksów KRYAKVA. Ta sama liczba systemów powinna otrzymywać lotnictwo morskie. 23 zestawy wersji KRYAKVA-B zostaną zakupione w przypadku stacji eksploracji hydroakustycznych.
Wnioski o przetarg są akceptowane do 17 kwietnia. Wkrótce zostanie podpisana umowa na dostawę wymaganych produktów, po czym rozpoczyna się ich produkcja. Jak wspomniano, departament wojskowy chce uzyskać pierwsze kompleksy hydroakustyczne wymaganych typów w tym roku.
Według raportów, kompleks hydroakustyczny MGK-335EM-03 "KRYAKVA" został stworzony przez obawy "OceanPribor" (Petersburg). Kompleks ten przeznaczony jest do montażu w małych i średnich pojazdach. Możliwe jest zainstalowanie wszystkich niezbędnych urządzeń zarówno podczas budowy statków, jak i podczas naprawy i aktualizacji. W tym drugim przypadku system KRYAKVA jest zamiennikiem starszego kompleksu MGK-355MS. Według raportów nowe modyfikacje przeznaczone do pracy na innych mediach zostały utworzone na podstawie kompleksu statków. W rezultacie gaz rodzinny Kryakva może być również używany przez okręty podwodne, samoloty i stacjonarne systemy wywiadowcze.
Niezależnie od przewoźnika, kompleksy mają podobne zadania i są jak najbardziej jednolite. Ich głównym zadaniem jest poszukiwanie okrętów podwodnych. Wykrywanie celów jest wykonywane w trybie aktywnym przy użyciu echolokacji lub w pasywnym - w tym przypadku twój własny hałas jest śledzony. Ponadto możliwe jest wykrywanie sygnałów innych kompleksów działających w trybie aktywnym. Ponadto automatyzacja "Mallards" jest w stanie samodzielnie towarzyszyć dane docelowe i wydawać do docelowego oznaczenia na temat kontroli przewoźnika łucznictwa anty-obronnego. Możliwe jest automatyzacja klasyfikacji wykryty obiektu. Kompleksy MGK-335EM-03 "KRYAKVA" mają funkcję wiązania hydroakustycznego przy niskich i wysokich częstotliwościach. Zapewnia również korzystanie z komunikacji kodu i identyfikacji.

Architektura GAK MGK-335EM-03
W celu zwiększenia charakterystyki operacyjnej kompleksy mają szereg ważnych funkcji i funkcji. Podczas operacji kompleksu hydroakustycznego przeprowadza się automatyczna kontrola poziomu zakłóceń akustycznych. Automatyzacja jest zdolna do przewidywania oczekiwanego zakresu systemu w zależności od aktualnych warunków. Istnieją automatyczne elementy sterujące do obsługi wszystkich komponentów kompleksu i śledzić ich status. Automatyzacja niezależnie śledzi działanie agregatów i tworzy diagnostykę. W przypadku wykrywania problemów w trybie automatycznym, wykonywana jest ich lokalizacja. Istnieje funkcja operatorów szkoleniowych, podczas których używane są cele naśladujące.
W konfiguracja podstawyPrzeznaczony do montażu na statkach powierzchniowych GAK MGK-335EM-03 "KRYAKVA" zawiera kilka głównych urządzeń w swojej kompozycji rozwiązywanie różnych zadań. Główne i tylko sposoby obserwacji i wykrywania celów w tym przypadku jest ganek aktywną antenę pasywną. Wykonany jest w formie cylindrycznego korpusu wyposażonego w dużą liczbę wrażliwych elementów. Aby zachować pożądaną pozycję antenową podczas pracy, używany jest specjalny system zawieszenia z urządzeniami stabilizującymi. Antena ma wysokość 1 m i średnicę 1 m. Koło cylindra znajduje się 36 filarów z 12 elementami na każdym.
Montowane są również na pokładzie statku przewoźnika, urządzenie generatora, odbierania i wzmacniającego i dopasowywania, a także urządzeń cyfrowych i urządzeń do przetwarzania sygnału i sterowania i sterowania stabilizacji. Wszystkie te elementy kompleksu są połączone. Dostarczanie energii elektrycznej do wszystkich elementów kompleksu przeprowadza się za pomocą oddzielnego urządzenia zasilającego podłączonego do ogólnych systemów elektrycznych.
W miejscu pracy złożonego operatora proponuje się zamontować pilota ze wszystkimi niezbędnymi kontrolami. Dane dotyczące sytuacji podwodnej, wykryte cele i działanie funduszy hydroakustycznych są wyświetlane w dwóch kolorowych monitorze. Głównymi organami sterowania są klawiaturą i trackball umieszczoną na przedniej konsoli. Część przycisków i przełączników są umieszczane obok monitorów. Zaproponowany jest również deweloper systemu KREAKVA w celu użycia zdalnego wskaźnika. W pewnej odległości od głównej konsoli można zainstalować dodatkowy monitor, który wyświetla informacje o bieżącym ustawieniu.

Antena wtyczka "Mallard"
Według raportów Rodzina Kryakva obejmuje kompleksy hydroakustyczne kilku modeli, różniących się od siebie z kompozycją sprzętu specjalnego, przede wszystkim anten i innych środków wykrywania. Zatem w projekcie MGK-335EM-01, antena podloile uzupełnia holowaną elastyczną antenę przedłużoną. Kompleks MGK-335EM-02 ma emitowane i elastyczne rozszerzenie dotykowe i elastyczne rozszerzenie. Produkt MGK-335EM-04 charakteryzuje się rozszerzonym zakresem częstotliwości podczas pracy w trybie aktywnym, co pozwala na wykrycie torpedy, a wersje "Mallard" MGK-335EM-05 obniżyły odbierające i emitujące anteny.
Według oficjalnych danych dotyczących "OceanPribor", MGK-335EM-03 GAK "KRYAKVA" jest zdolny do wykrywania okrętu podręcznika równoważnym promieniem Re \u003d 10 m na odległości do 10-12 km. Współrzędne celu są określane z dokładnością 30 'na łożysku. Dokładność odległości osiąga 1% odległości odległości. W trybie wyczerpania hałasu kompleks jest w stanie przechwycić dźwięki o częstotliwości od 1,5 do 7 kHz. Po wykryciu celu i podjąć go do akompaniamentu, dokładność definicji łożyska wynosi 30 '. Tryb wykrywania sygnałów hydroakustycznych, co oznacza wykrywanie aktywnego gazu działającego w trybie aktywnym, umożliwia kontrolowanie zakresu częstotliwości 1,5-7 kHz. Łożysko na źródle wykryty sygnał jest określony z dokładnością do 10 °.
Analizując charakter otrzymanych sygnałów odzwierciedlonych lub przechwyconych, kompleks MGK-335EM-03 jest w stanie określić przynależność do wykrytych przedmiotów do jednej lub innej klasy technologii. Dzięki pomocy operatora kompleks hydroakustyczny jest w stanie odróżnić łódź podwodną z torpedy. Jednocześnie możliwe jest jednoczesne wydanie docelowego oznaczenia do systemów broni anty-podkomplete.
Kompleks Kryakva charakteryzuje się dość dużą cechami komunikacji hydroakustycznej, a także ma kilka specjalnych funkcji. Komunikacja o niskiej częstotliwości lub wysokiej częstotliwości prowadzona jest w zakresie do 20 km. Komunikacja kodu, identyfikacja wykryty obiektu lub zmiana odległości do niego można przeprowadzić na odległości do 30 km. Z MHK-335EM-03 GAK, załoga statku przewoźnika może wspierać komunikacja telefoniczna Zarówno z rosyjskimi okrętami podwodnymi, jak imi statkami przy użyciu zakresu częstotliwości NATO.

Kompleks panelu sterowania.
Według ostatnich, w latach 2017-19, marynarka wojenna będzie musiała otrzymać 55 zestawów rodziny "KRYAKVA" w MHK-335EM " różne konfiguracje.Przeznaczony do montażu na mediach różnych klas. Większość z tego sprzętu planuje się zainstalować na hydroakatycznych stacjach eksploracji, podczas gdy inne kompleksy będą używane przez okręty podwodne i samolotów. Dokładne informacje o przyszłych nośnikach zamówionych kompleksów, z oczywistych powodów, ten moment Bez braku. Chociaż pozostaje tylko w celu zbudowania prognoz i próbować dokładnie przewidzieć, która technika będzie wyposażona w taki sprzęt.
W przypadku lotnictwa antyadwodowego, IL-38 i TU-142 najnowszych modyfikacji można uznać za możliwe przewoźnik. Teraz ta technika jest naprawiona i modernizacja, podczas której odbiera różne nowe sprzęt. Następne aktualizacje projektu mogą również korzystać z najnowszych systemów hydroakustycznych.
Zakupiono 16 kompleksów w konfiguracji dla okrętów podwodnych. Prawdopodobnie sprzęt ten będzie używany w przyszłej naprawie istniejących statków stosunkowo starych projektów. Biorąc pod uwagę wiek i wyposażenie okrętu składające się z okrętów podwodnych, można założyć, że wszelkie krajowe okręty podwodne atomowe i wysokoprężne ze wszystkich istniejących projektów mogą stać się potencjalnymi nośnikami systemów "Kryakva". Nie wszystkie statki rosyjskich siły podwodnej są wyposażone w nowoczesne środki obserwacji sytuacji podwodnej, dlatego potrzebują nowe podobne produkty. Zgodnie z naprawą będą mogli otrzymać nowe urządzenia z podwyższonymi cechami.
Jest ciekawy, że w warunkach obecnej przetargu nie ma sensu na zakup kompleksów hydroakustycznych przeznaczonych do montażu na statkach powierzchniowych. Produkt MGK-335EM-03 został początkowo zaprojektowany właśnie jako statek obserwacji i tylko następnie opracowany, w wyniku czego można zainstalować na innych przewoźnikach. Według niektórych nie są całkowicie zrozumiałe przyczyny w najbliższych planach Departamentu Wojskowego, zakup Guck statku Kryakvy.

Schemat kompleksu statków MGK-335EM-05 z dodatkową niższą anteną
Według krajowych mediów jest już znany, gdy zakupione kompleksy hydroakustyczne przejdzie. Uzyskane produkty Ministerstwo Obrony dystrybuuje między kilkoma związkami lotniczymi i lotnictwem morskim odpowiedzialnym za wdrożenie obrony antyrodyny. Sprzęt pójdzie do Kronstadt, Severomorsk i Novorossiysk, a także na niektórych baz terytorium Primorsky. Inne szczegóły dotyczące przyszłej działalności systemów obiecujących nie są jeszcze komunikowane.
Z dostępnych danych wynika, że \u200b\u200bsprzęt okrętów podwodnych, samolotów i stacjonarnych systemów hydroakustycznych z nowymi kompleksami rodziny MGK-335EM-03 "KREAKVA" będą miały pozytywne konsekwencje dla całej obrony antydukrowej floty jako całości. Podczas budowy lub modernizacji łodzi podwodnych, samolotów itp. Otrzymasz nowoczesny sprzęt do śledzenia podwodnych obiektów, które pojawią się odpowiednio na wydajność ich pracy. W rezultacie zakres i prawdopodobieństwo wykrywania potencjalnie niebezpiecznych obiektów zauważalnie zwiększy się.
Oprócz głównych zadań związanych z wykrywaniem i konserwacją różnych obiektów, nowy gaz może być wykorzystywany do identyfikacji znalezionych celów, wydawania systemów zarządzania celami itp. Przewidywany jest również reżim szkoleniowy, który ułatwia przygotowanie operatorów hydroaktoustyków.
Według oficjalnych danych, w połowie kwietnia, dział wojskowy zakończy akceptację wniosków o niedawno uruchomiony przetarg i rozpocząć wybór dostawcy wymaganego sprzętu. Wkrótce powinno być umowa na dostawę, po czym rozpocznie się rozpocznie się seryjna kwestia wymaganych modyfikacji GAK. Pierwsze próbki takiego sprzętu planowane są już w bieżącym roku, ten ostatni - nie później niż na koniec 2019 roku. Oczywiście, dostawa takich produktów zostanie przeprowadzona jednocześnie z konstrukcją / modernizacją ich przewoźników. Oznacza to, że nie później niż na początku następnej dekady, krajowa obrona przeciw łodzi podwodziowej otrzyma nowy sprzęt i z nowymi możliwościami. Wszystko to pozytywnie wpłynie na potencjał marynarki generalnej.
Według materiałów witryn:
http://zakupki.gov.ru/
http://-mash.ru/
http://oceanpribor.ru/
http://armsdata.net/
http://flot.com/
Wynalazek dotyczy pola hydroaktoustyki i może być stosowany jako uzbrojenie hydroakustyczne okrętów podwodnych różnych celów, a także podczas podwodnych prac geologicznych i hydroakustycznych oraz badań.
Kompleksy hydroakustyczne (gaz) są podstawą wsparcia informacyjnego podwodnych. Typowy gaz zawiera następujące ścieżki (stacje hydroakustyczne) i systemy:
Bezgłośność (SP), solidowanie, głównie zadania wykrywania okrętów podwodnych i statków powierzchniowych;
Hydrolenia (CH), działające w aktywnym trybie podwodnego docelowego wykrywania w dużej odległości;
Wykrywanie sygnałów hydroakustycznych (OGS) zaprojektowany w celu wykrycia tych działających w różnych zakresach hydroliatorów;
Dźwięk i identyfikacja;
Ministands (MI), który występuje jednocześnie cechy wykrywania przeszkód w pobliżu łodzi podwodnej;
Centralny system obliczeniowy (CCC);
System wyświetlania, rejestracji, dokumentacji i zarządzania (SORPP).
Skład każdej ścieżki zawiera anteny akustyczne. Urządzenia generatora są podłączone do anten promieniujących, oraz z odbieraniem - urządzenia wstępne.
GSU 90 okręt podwodny jest znany, opracowany przez STN Atlas Electronic (Niemcy), zawierające HP, CP, OGS, komunikację i MI oraz CVS, Sorg i całkowitą oponę.
Znaki, powszechne z żądanym gazem, są wszystkie wymienione elementy tego analogowego.
Powody, które zapobiegają osiągnięciu tego analogu wyniku technicznego osiągnięte w wynalazku, są stosunkowo wysokim poziomem zakłóceń hydrodynamicznych i hałasu łodzi oraz brak możliwości niezależnych i jednocześnie pracujących przydatnych i jednoczesnych komunikacji i identyfikacji , a także stosunkowo wąski zakres częstotliwości podłączonych sygnałów.
Z tych niedociągnięć gaz jest wolny, chroniony przez Certyfikat Federacji Rosyjskiej nr 20388 dla modelu użyteczności, IPC G01S 3/80, 15/00, 2001. Ten analog zawiera jednak wszystkie składniki pierwszego analogu, jednak Emitowana bezkierunkowa antena szerokopasmowa i jest dodatkowo wprowadzana do jego ścieżki dystrybucji i identyfikacji. Urządzenie generatora, w trakcie OGS - wysokiej częstotliwości i anten szerokopasmowych oraz urządzenie do obróbki wstępnej, podczas gdy wszystkie anteny akustyczne są umieszczane w owiewce nosa lub w ogrodzeniu cięcia.
Wszystkie elementy tego analogu, a także składniki pierwszego analogowego, są zawarte w kompozycji proponowanego gazu.
Powody, które zapobiegają osiągnięciu w tym analogu wyniku technicznego osiągniętego w wynalazku, są następujące:
Ograniczony przegląd głównej anteny traktatu HP, ze względu na zaciemnienie narożników paszowych w przypadku;
Ograniczone rozmiary głównej anteny nosowej nie zezwalają na zlokalizowanie źródeł sygnałów, którego zakres częstotliwości leży poniżej 0,8-1,0 kHz;
Jedyna emitująca antena ścieżki dłoni ma ograniczoną, stosunkowo wąski sektor napromieniowania przestrzeni w komorze nosa;
Nasal Emitowanie anteny ścieżki komunikacyjnej i identyfikacji jest zacienione przez organizm, co eliminuje związek z korespondentami w sektorze rogów paszowych;
Odbiór sygnałów ścieżki OGS na antenę z charakterystyką wielotrakcyjną w kierunku (XN) zapobiega konstrukcji owieństwa nosa;
Skupiona antena wysokiej częstotliwości ścieżki OGS odcienie konstrukcję ogrodzenia ogrodzenia.
Najbliższy w esencji technicznej do żądanego (prototyp) jest gazem podwodnym, chronionym patentem Federacji Rosyjskiej nr 24736 dla modelu użyteczności, Cl. G01S 15/00, 2002. Zawiera ścieżki głównego i dodatkowego Sp, przewodu OGS, przewodu HL, przewód komunikacyjny i identyfikacji, ścieżki ministerstwa i wykrywania przeszkód nawigacyjnych (MI), CVS, Sorg i całkowita opona.
Główny przewód SP zawiera główną antenę otrzymywania nosa, wykonane z możliwością tworzenia właściwości federycji statycznej w płaszczyznach poziomych i pionowych, a pierwsze urządzenie do obróbki umieszczonej w kapsułce wewnątrz anteny.
Dróg dodatkowego SP zawiera elastyczną rozszerzoną antenę holowaną (GPBA), kabel kablowy, bieżące urządzenie kolektorowe i urządzenie wstępne.
Ścieżka OGS zawiera trzy anteny odbierające i urządzenie wstępne. Pierwsza antena jest umieszczana w części nosowej ogrodzenia cięcia i ma wielowątkową XN. Druga antena umieszcza się w zasilaniu ogrodzenia cięcia i jest wszechmocna i wysoka częstotliwość. Trzecia antena jest szerokopasmowa, a jego bloki są umieszczane w owiewce nosowej, w surowej części ogrodzenia cięcia i po bokach łodzi podwodnej.
Ścieżka hydrolików zawiera atmosferę emitującą ubojową, umieszczoną w nosie części ogrodzenia cięcia, dwa anteny emitujące na pokładzie, znajdujące się po obu stronach podwodnej i urządzenia generatora.
Ścieżka komunikacyjna i identyfikacja zawiera antenę emitującą nosową, umieszczoną w nosie zużycie, pasza promieniującą antenę umieszczoną w ogrodzeniu cięcia, a urządzenie generatora.
Dróg zawiera antenę odbiorczą, wykonane z możliwością obrotu HN w płaszczyźnie pionowej i urządzenia wytwarzającego, przełącznik "odbierający" i urządzenie do przedprocessującego.
Urządzenie SORF wykonane jest z podwójnego slip usuwa z podłączonymi urządzeniami peryferyjnymi. Wejścia i wyjścia są podłączone bezpośrednio do CVS.
Poprzez całkowitą oponę, urządzenia generatora i urządzenia wstępne przetwarzania wszystkich ścieżek są podłączone do CVC i Sorror.
Znaki, wspólne ze znakami proponowanego gazu, są wszystkie wymienione elementy kompleksu prototypu i relacji między nimi.
Powodem, dla którego osiągnięcie wyniku technicznego osiągnięte w złożonym prototypie osiągniętym w wynalazku jest stosunkowo niską tajemnicą kompleksu.
Innym powodem, dla którego zapobiega wynikowi wskazanego wyniku jest niewystarczający zakres podwodnych celów w trybie HL.
Oba te powody są spowodowane faktem, że anten ścieżki HL jednocześnie emitują sygnał w prawie wszystkich kierunkach, chociaż sam sygnał i puls. Faktem jest, że wszystkie trzy anten ścieżki CL mają dość szeroki XN, aby zablokować sektor pracy, z wyjątkiem narożników paszowych. Pozwala to na wykrycie promieniowania z niemal każdej części, co znacznie zwiększa prawdopodobieństwo wykrywania łodzi podwodnych. Z drugiej strony duża szerokość HN anten prowadzi do zmniejszenia współczynnika wzmocnienia, a zatem moc sygnału emitowanego, co oznacza zakres do celu, na którym siłę będzie wystarczająca dla jej pewnego wykrycia .
Zadanie techniczne, na roztworze, którego wyreżyserowano wynalazek, jest zwiększenie szerokości działania gazu i zakresu wykrywania celów w trybie HL.
Wynik techniczny uzyskuje się przez fakt, że w znanym GA wszystkie promieniujące anten przewodu HL są wykonane elektronicznie sterowane zarówno przez liczbę promieni XN, jak i ich szerokości i kierunku, podczas gdy wejścia sterujące tych anten są połączone przez całość magistrala podłączona do CSW i Sorg, liczba promieni XN każda z anten na jednostkę, więcej niż liczba towarzyszących mu celów antenowych, a ich szerokość jest minimalnie możliwa, ale wystarczająca na pewne wychwytywanie i utrzymanie celu, podczas gdy jeden Promieniami HN ma szerokość wystarczającą do przechwytywania celu eskorty i skanuje rogu w określonych antenach sektora odpowiedzialności, a pozostałe promienie anten HN towarzyszą wykryty wykryty docelowy.
Aby osiągnąć wynik techniczny w GAK zawierający ścieżkę głównego SP, przewód dodatkowego SP, ścieżki OGS, ścieżkę HL, przewód komunikacji i identyfikacji, ścieżki MI, CVS, SORF i całkowitą oponę, podczas gdy Sprzęt jest zadowolony z podwójnego slip usuwa z podłączonymi urządzeniami peryferyjnymi i ograniczonymi CVS, główna ścieżka HP zawiera główną antenę odbierającą nosową, wykonaną z możliwością tworzenia statycznej federy w płaszczyznach poziomych i pionowych oraz pierwsze urządzenie do przedprocessującego , umieszczony w kapsułce wewnątrz anteny i podłączony bezpośrednio do wyjścia antenowego, a wyjście - przez całkowitą oponę z CVS i Sorg, ścieżka OGS zawiera pierwszą antenę umieszczoną w części nosa ogrodzenia cięcia i mając Multi-leczenie HN, druga antena umieszczona w części zasilającej ogrodzenia cięcia i jest wysoką częstotliwością i omnikowatą, trzecią anteną, których bloki są umieszczane w spójnym nosie, w zasilaniu ogrodzenia cięcia i po bokach. Dwukierunkowa łódź, która jest szerokopasmowym i drugim urządzeniem wstępnie przetwarzającym, których wejścia sygnałowe są podłączone bezpośrednio do wyjść odpowiednich anten ścieżki OGS, a wejście sterujące i wyjście - przez całkowitą oponę CVS i Sorror, ścieżka CL zawiera zatrzasnącej antenę emitującej nosową umieszczoną w ogrodzeniach do cięcia nosa, dwa anteny promieniujące na pokładzie, umieszczone po obu stronach łodzi podwodnej i pierwszego urządzenia generatora, których wyjścia są podłączone do sygnału Wejścia odpowiednich anten emitujących ścieżki HL oraz wejście sterujące - przez całkowitą oponę z CVS i Sorg, ścieżka komunikacji i identyfikacja zawiera nosową antenę promieniującą umieszczoną w nosie współpracownik, umieszczony antenę emitującą W ogrodzeniu cięcia i drugiego urządzenia generatora, których wyjścia są podłączone do wejść sygnałów anten emitujących ścieżki komunikacyjnej i identyfikacji, oraz wejście sterujące - przez całkowitą oponę z CVS i Sorg, Dróg zawiera Antena odbierająca UH z możliwością obrotu HN w pionowej płaszczyźnie i trzeci generator umieszczony w nosie, trzeci generator, który jest podłączony do wyjścia wejściowego anteny ścieżki za pomocą przełącznika odbioru, a wejście sterujące - przez Całkowita opona z CVS i Sorg i trzecim urządzeniem do przedprocessującego, którego wejście jest podłączone bezpośrednio do wyjścia anten nadawczych, a wyjście - przez całkowitą oponę z CCC i Sorp, ścieżką Dodatkowy spp zawiera GPB, przez kabel kablowy i bieżące urządzenie kolektorowe podłączone do czwartego urządzenia wstępnego przetwarzania podłączonego do jego wyjścia przez całkowitą oponę CCL i Sorg, wszystkie promieniowanie anten ścieżki hydroliku są wykonane elektronicznie przez liczbę promieni XN i ich szerokości i kierunku, podczas gdy wejścia sterujące tych anten są podłączone przez całkowitą magistralę podłączony do CSW i Sorrod, liczba promieni HN każda z każdego anten na jednostkę jest większa niż liczba towarzyszy przez te cele antenowe, a ich szerokość jest minimalnie możliwa, ale Jest dokładny dla pewnego schwytania i konserwacji celu, podczas gdy jeden z promieni XN ma szerokość wystarczającą do zdobycia celu eskorty i skanuje antenę w danym sektorze odpowiedzialności antenowej, a pozostałe promienie HN towarzyszą Wykryto wykryte cele.
Badania twierdził GAK na literaturze patentowej i naukowej i technicznej wykazały, że zestaw nowo wprowadzonych cech anten traktu HL i nowych powiązań wraz z resztą elementów i połączeń kompleksu nie są podatne na samodzielną klasyfikację . Jednocześnie nie powinno być wyraźnie ze stanu techniki. Dlatego proponowany gaz powinien być uznany za spełnienie kryterium "nowości" i posiadanie poziomu wynalazku.
Wynalazek jest zilustrowany przez rysunek, na którym rysunek 1 przedstawia schemat strukturalny proponowanego gazu.
Kompleks obejmuje ścieżki głównego i dodatkowego Sp, przewodu HL, ścieżki OGS, przewód komunikacyjny i identyfikacji, ścieżki MI, CSS i Sorga oraz całkowitą oponę.
Główna ścieżka SP zawiera główną antenę odbierającą nosową 1 i urządzenie wstępne 2, kolejno podłączone do anteny 1. Urządzenie 2 umieszcza się w kapsułce hermetycznej wewnątrz anteny 1 (związek antenowy 1 z urządzeniem 2 jest pokazany Rys. 1 Kropkowana strzałka). Antena 1 i urządzenie 2 są wielokanałowe i składają się z kanałów N × M, gdzie N oznacza ilość XN (kanałów przestrzennych) w płaszczyźnie poziomej, M jest ilość XN (kanałami przestrzennymi) w płaszczyźnie pionowej. Przez całkowitą magistralę 3 kompleksu główne urządzenie do przewodu SP 2 jest związane z CVS 4 i SOGG 5.
Dróg dodatkowej (niskiej częstotliwości) SP zawiera GPB 6, za pomocą kabla kabla 7 i aktualnego urządzenia kolektora (na FIG. 1 nie jest wyświetlane) podłączone do urządzenia do obróbki wstępnej 8. Dzięki całkowitemu autobusowi 3 kompleksu urządzenie 8 ścieżki dodatkowego spp jest związane z CVS 4 i SOGG 5.
Dróg HL zawiera brzegową antenę emitującą nosową 9, dwa na pokładzie anten 10 i 11, a urządzenie generatora 12. Antena 9 jest umieszczona w ogrodzeniu cięcia 13, a antenę 10 i 11 - po obu stronach łodzi podwodnej. Anteny 9, 10 i 11 są elektronicznie zarządzane. Ich wejścia sygnałowe są podłączone bezpośrednio do odpowiednich wyjść urządzeń 12 i wejść sterujących - przez całkowitą magistralę 3 kompleksu z CVS 4, a także wejście sterujące urządzenie 12.
Ścieżka OGS zawiera anten 14, 15, 16 i urządzenie wstępne przetwarzania 17. Antena 14 ma wielowątkową XN i znajduje się w części nosowej ogrodzenia cięcia. Antena 15 znajduje się w zasilaniu ogrodzenia cięcia i jest wszechobecna i wysoka częstotliwość. Antena 16 jest dostępna szerokopasmowa, a jego bloki 16.1, 16.2, 16.3 i 16.4 są umieszczone w zacisku nosa 18, po bokach i w części zasilającej płot 3. Wyjścia anten 14, 15 i 16 są podłączone bezpośrednio Do odpowiednich wejść urządzenia 17 połączone przez jego wyjście przez całkowitą oponę 3 kompleksów z CVS 4 i Sorcha 5.
Ścieżka komunikacyjna i identyfikacja zawiera antenę promieniującą nosową 19, antenę elektroniczną 20 i urządzenie generatora 21. Wejście sterowania generatora 21 przez całkowitą magistralę 3 kompleksu jest podłączony do CVS 4, a pierwsze i drugie wyjścia są bezpośrednio bezpośrednio z antenami i 20 wejściami.
Dróg zawiera antenę odbiorczą 22, urządzenie generatora 23, przełącznik odbiorcy (nie pokazano) i urządzenie wstępne 24. Antena 22 jest umieszczona w obróbce nosowej 18 i jest skonfigurowana do obracania HN w płaszczyźnie pionowej, jego wyjście wejściowe za pomocą przełącznika odbioru jest podłączony do wyjścia urządzenia 23 i wejściem urządzenia 24. Wejście sterujące Urządzenie 23 i wyjście urządzenia 24 poprzez kompleks całkowitej opon 3 podłączony do CVS 4 i SOGG 5.
Oprócz całkowitej opony, 3 kompleksy między CVS 4 i Sord 5 posiada szereg bezpośrednich połączeń.
CCS 4 jest kombinacją procesorów uniwersalnych i specjalnych procesorów i ma strukturę komputera sterującego.
Sort 5 składa się z dwóch konsol, z których każdy ma dwa wyświetlacze w swojej kompozycji, elementy sterujące (klawiatura, przyciski, gniazda). Struktura konsol jest podobna do struktury komputera osobistego. Typowe urządzenia peryferyjne są podłączone do portów konsol: telefon, głośnik, drukarki, rejestrator, magnetyczne i optyczne rejestrator.
Prace proponowanego gazu przeprowadza się w następujący sposób.
Antenny otrzymujące 1, 6, 14, 15 i 16 wykonują transformację elektrycznych (akustycznych) oscylacji do mechanicznych. Antena 22 jest odwracalna.
W przewodzie HL odbiór echa jest wykonywany przez antenę 1. W ścieżce komunikacyjnej i identyfikacji odbioru sygnałów komunikacyjnych i sygnałów ECHO wykonuje również antenę 1.
W urządzeniach Generator 12, 21 i 23, sygnał impulsowy wymaganej mocy powstaje dla późniejszej amplifikacji i promieniowania jako sygnał dźwiękowy z antenami 9, 10 i 11 ścieżką dłoni, anten 19 i 20 ścieżki komunikacyjnej i identyfikacji i antena 23 przewód. Sygnały sterujące parametrów wygenerowanych sygnałów są utworzone do sortowania 5 i CCS 4.
Urządzenia 2, 8, 17 i 24 obróbki wstępnej są wstępnie przetwarzane sygnały, czyli ich amplifikację, filtrowanie, przetwarzanie częstotliwości i przetwarzanie i konwersja z widoku analogowego w cyfrowym.
CCS 4 i SORG 5 to systemy związane z pracą wszystkich ścieżek HAC. Pracują z danymi cyfrowymi. Podstawą prac tych systemów jest algorytmy przetwarzania informacji zaimplementowane przez oprogramowanie. Te fundusze są przeprowadzane:
Całkowita formacja parametrów sygnału impulsowego, który następnie w urządzeniach generatora jest tworzony i wzmacniany przez mocę;
Powstawanie HN kontrolowanego anteny przewodu HL, biorąc pod uwagę potrzebę skanowania ich promieni;
Wtórne przetwarzanie informacji, które wykrywa dokładną strukturę sygnału;
Podejmowanie decyzji o wykryciu celu;
Automatyczny cel wsparcia.
Działanie gazu jest zarządzane przez operatorów, które są umieszczone za konsolami. Sortuj 5. Głównym sposobem działania jest odbiór, z głównym i dodatkowym SP, OGS, komunikacji. Ścieżki HL i MI, a także tryb "aktywnej pracy" ścieżki komunikacji, są dołączone do promieniowania na poleceń z Sorpp. 5. Kanały odbierające działają jednocześnie i niezależnie od siebie. Otrzymane sygnały za pomocą anten 1, 14, 15, 16, 6 Wprowadzają urządzenia 2, 8, 17, 24, są oparte na zakresach częstotliwości, wykonuje się ich przetwarzanie czasu częstotliwości. Ponadto otrzymane i przetworzone sygnały w całkowitej magistrali 3 są zapisywane do CCC 4, gdzie oprogramowanie na podstawie algorytmów pobieranych w algorytmach gazu wytworzyło przetwarzanie sygnału wtórnego. Elementy ruchu i współrzędnych celów są określane, dane uzyskane z tego samego celu różnych ścieżek są uogólnione. Operator decyduje o alokacji celów do automatycznego wsparcia i przesyła odpowiednie polecenie.
Jeśli istnieje odpowiednie polecenie operatora z SORUD 5 na włączeniu głównych trybów aktywnych, to polecenie wprowadza CSW 4 i przetworzone. Kompleksowe polecenia zawierające kody parametrów trybu promieniowania jest produkowany w CVS 4. Zgodnie z całkowitą oponą 3 polecenie to jest przesyłane do urządzenia generatora 12 (21, 23), w którym powstaje powstawanie silnego sygnału impulsowego promieniowania dostarczanego do antenę 9, 10, 11 (19, 20.22).
Podczas pracy słuchawki w trybie aktywnym, ze względu na elektroniczną kontrolę anten w każdym z anten 9, 10 i 11, jednym z promieni jego HN ma szerokość wystarczającą do pewnego uchwycenia celu do eskorty i skanuje róg w określonym sektorze pracy tej anteny. W przypadku obecności w tym sektorze te ostatnie są wykrywane przez belkę skaningową i są przesyłane do obsługi. W tym samym czasie skanowanie wiązki "wyszukiwania" nie jest przerywane, ale utworzona jest dodatkowa wiązka HN, zorientowana na nowo odkryty cel. Promień ten towarzyszy nowo odkryty cel. Jego szerokość zależy od zakresu do celu, jego wielkości i prędkości ruchu w kierunku prostopadle do kierunku "podwodnego - docelowego". Ta szerokość jest określona praktycznie. Powinien być możliwy minimalny, ale wystarczający do pewnego siebie towarzyskiego celu. Wraz z pojawieniem się każdego nowego celu w nowym kierunku opisany proces jest powtarzany, a powstaje kolejna HN z anteny, która jest ustalana w sprawie utrzymania tego celu. Proces ten zostanie powtórzony aż do wszystkich celów, które są w obszarze odpowiedzialności anteny, nie będą towarzyszyć odpowiednie promienie anteny HN.
Tak więc podczas pracy ścieżki dłoni promieniowanie sygnału sondowania odbywa się przez kilka wąskich belek (liczba promieni na jednostkę przekracza liczbę celów, a jeśli cele są w jednym kierunku, jest jeszcze mniej) . Ten proponowany złożony znacznie różni się od prototypu, w którym kontrola anten ciągle GL. W linii ręcznej prototypu szerokość HN każdego z anten powinna być co najmniej szerokość sektora odpowiedzialności anteny, inaczej pod względem tego sektora, cel nie może być wykryty w ogóle.
W prototypie w trybie HL promieniowanie sygnału sondowania przeprowadza się w sposób ciągły w sektorze odpowiedzialności anten, więc promieniowanie można wykryć z dowolnego kierunku. W proponowanym GAK w większości sektora eksploracyjnego brakuje promieniowania z dużymi przerwami. To znacznie zmniejsza prawdopodobieństwo wykrywania promieniowania i określenie współrzędnych źródła przy stosowaniu proponowanego gazu w porównaniu z prototypem.
Ponadto wiązka "wyszukiwania" w proponowanym gazie ma raczej wąskie jn, co pozwala skupić całą energię urządzenia generatora w wąskim sektorze, w którym istnieje napromieniowany cel, który jest równoważny ze wzrostem Moc celu sygnału w porównaniu z prototypem, gdzie szerokość anteny jest duża, a większość emitowanych energii przechodzi przez napromieniowany cel.
Wzrost mocy celu sygnału prowadzi do zwiększenia zakresu wykrywania.
W ten sposób proponowana przerwa stanowi wzrost bezpieczeństwa kompleksu i zakresu detekcji docelowej w trybie komina w porównaniu z prototypem.
Gaz według wynalazku jest dość łatwy do wdrożenia. Anteny traktatu GL mogą być realizowane zgodnie z zaleceniami podanymi w książce [L.K. Samoilov. Elektroniczna kontrola charakterystyki orientacji anten. - l.: Shipbuilding. - 1987]. Pozostałe urządzenia można wykonać jako odpowiednie urządzenia prototypowe.
Kompleks hydroakustyczny okrętu podwodnego zawierającego ścieżkę głównej bezgłoszenia, ścieżka dodatkowej bezwzględniania, ścieżka wykrywania sygnałów hydroakustycznych, ścieżki hydrolicytacji, przewodu komunikacyjnego i identyfikacji, ścieżki ministerstwa i wykrywanie przeszkód nawigacyjnych, Centralny system obliczeniowy, wyświetlacz, rejestracja, dokumentacja i system kontroli oraz całkowitą oponę, w tym przypadku sprzęt systemu wyświetlania, rejestracji, dokumentacji i sterowania jest wykonana z dwupomansowych usuwa z podłączonych urządzeń peryferyjnych i jest podłączony Do centralnego systemu obliczeniowego, główna ścieżka wykrywania szumów zawiera główną antenę odbierającą nosową, skonfigurowany do utworzenia statycznych charakterystyk ostrości w płaszczyźnie poziomych i pionowych oraz pierwszego urządzenia wstępnego przetwarzania umieszczonego w kapsułce wewnątrz anteny i podłączony bezpośrednio do Wyjście anteny i wyjście - przez całkowitą oponę z centrum Allen Computing System i System wyświetlania, rejestracja, dokumentacja i sterowanie, ścieżka wykrywania sygnałów hydroakustycznych zawiera pierwszą antenę umieszczoną w części nosowej ogrodzenia cięcia i mającą charakterystykę wielokoloratywnej orientacji, druga antena umieszczona W części zasilającej ogrodzenia cięcia i jest wysokiej częstotliwością i obraźliwą, trzecią anteną, której bloki są umieszczane w współrzędnej nosie, w zasilaniu ogrodzenia cięcia, a po bokach łodzi podwodnej, która jest szerokopasmowym, I drugi urządzenie do przetwarzania wstępnego, których wejścia sygnałowe są podłączone bezpośrednio do wyjść odpowiednich anten ścieżki wykrywania sygnałów hydroakustycznych oraz wejście sterujące i wyjście - przez całkowitą oponę z centralnym systemem komputera i System wyświetlacza, rejestracji, dokumentacji i systemu sterowania, ścieżka hydrolologiczna zawiera podrzędną antenę nosową, umieszczoną w części nosa ogrodzenia cięcia, dwa na pokładzie emitujące Anteny umieszczone na obu płytach podwodnej, a pierwsze urządzenie generatora, których wyjścia są podłączone do wejść sygnałów odpowiednich anten promieniujących ścieżki hydrolicicy, a wejście sterujące - przez całkowitą magistralę z centralnym systemem komputerowym i System wyświetlacza, rejestracji, dokumentacji i zarządzania, ścieżka komunikacji i identyfikacja zawiera antenę promieniującą nosową umieszczoną w koordynatorze nosowym, pasza promieniującą antenę, umieszczoną w ogrodzeniu cięcia, a drugi urządzenie generatora, których wyjścia są Połączony do wejść sygnałów anten emitujących ścieżki komunikacyjnej i identyfikacji, oraz wejście sterujące - poprzez całkowitą oponę z centralnym systemem komputera i systemem wyświetlania, rejestracji, dokumentacji i zarządzania, ścieżką służby i wykrywanie przeszkód nawigacyjnych Zawiera antenę nadawczo-odbiorczą, wykonaną z możliwością obracania charakterystyki orientacyjnej w płaszczyźnie pionowej i umieszczony w tarcie nosowym, trzeci generator Urządzenie otwierające, którego wyjście jest podłączone do wyjścia wejściowego anteny ścieżki Ministanda i wykrywanie przeszkód nawigacyjnych za pomocą przełącznika "Odbiór" i wejście sterujące - przez całkowitą magistralę z centralnym systemem obliczeniowym oraz system wyświetlania, rejestracji, dokumentacji i sterowania oraz trzecie wstępne przetwarzanie urządzeń, którego wejście jest podłączone bezpośrednio do wyjścia anteny nadawczo-odbiorczej, a wyjście jest za pomocą całkowitego magistrali z centralnym systemem komputera i systemem wyświetlania , rejestracja, dokumentacja i kontrola, ścieżka dodatkowego wykrywania hałasu zawiera elastyczną rozszerzoną antenę holowaną przez kabel kablowy i bieżące urządzenie kolektorowe podłączone do wejścia czwarte urządzenie wstępne przetwarzania podłączone przez jego wyjście przez całkowitą oponę za pomocą opony Centralny system obliczeniowy i system wyświetlacza, rejestracja, dokumentacja i kontrola, znamienna tym, że wszystkie promieniujące anten ścieżki hydrotania są wykonane Organizacje pozarządowe są kontrolowane przez liczbę charakterystyki promieni charakterystyki orientacji i ich szerokości i kierunku, podczas gdy wejścia sterujące tych anten za pomocą całkowitego magistrali są podłączone do systemu centralnego komputera i systemu wyświetlania, rejestracji, dokumentacji i sterowania, liczbą Promieniami charakterystyki odniesienia każdego z anten na jednostkę więcej niż liczba towarzyszących tych celów antenowych, a ich szerokość jest minimalnie możliwa, ale wystarczająca na pewne wychwytywanie i towarzyszenie celu, z jednym z promieni orientacji Charakterystyka prądu pozostałymi promieniami cech orientacji antenowej towarzyszy ten cel antenowy.
Podobne patenty:
Wynalazek dotyczy stacji dźwiękowych (kompleksy wytwarzane dźwiękiem) i mogą być stosowane do określenia usunięcia źródła dźwięku (od) z lokalizatora akustycznego, jego skorygowany kąt wytwarzający dźwięk i współrzędne topograficzne (TC) tego.
Urządzenie do wykrywania sygnałów i określenie kierunku do ich źródła. Wynik techniczny wynalazku jest utworzenie nowego urządzenia do wykrywania sygnałów i określenie kierunku do ich źródła (źródła) z liczbą nieliniowych operacji w ścieżce przetwarzania równej 2.
Wynalazek dotyczy pola hydroakustyki. Jednostka: W sposobie określania kierunku do latarni morskiej hydroakustycznej, pozwany w warunkach rozmnażania sygnału nawigacyjnego określają kierunek jednocześnie w płaszczyznach poziomych i pionowych do szczelnego szczectwa hydroakustycznego, otrzymując arracie antenową respondentną bakonową, Wzmocnienie otrzymanego sygnału przez pre-wzmacniaczy podłączonych do wyjścia Klaszki anteny konwertera, digitalizacja z częstotliwością próbkowania FS.
Wynalazek dotyczy technik testowania i może być stosowany w badaniach wewnętrznych obiektów podwodnych. Wynik techniczny jest zmniejszenie błędu określania współrzędnych pozycjonowania i kątów orientacji obiektu pozycjonowania w przestrzeni mobilnego wielokąta.
Wynalazek dotyczy pola hydroaktoustyki i może być stosowany w pasywnej hydrolityce, a także w akustyce atmosferycznej i radaru pasywnym. Osiągniętym wynikem technicznym jest zapewnienie wizualnej obserwacji źródeł promieniowania na ekranie wskaźnika, ich położenie bezpośrednio w pożądanych współrzędnych pola obserwacyjnego "zakresie kierunkowskazu" z określeniem ich współrzędnych w wskaźnikach wskaźników w zakresie skal wskaźników przy maksymalnej odporności na hałas, Osiągalny w tym systemie przyjmującym i ograniczonym zwiększeniem przetwarzaniu i obliczeniom zwiększa koszty.
Użyj: w radaru, komunikacie radiowym i astronomii radiowej. Jednostka: Detektor korelacji sygnałów zawiera określoną tablicę dyspersyjną (prezent) wykonane w określony sposób, który obejmuje N od nieporozumień i MAS-pasywnych przetworników elektroakustycznych, odpowiadających im kanałom transmisji kanałów, kontrola charakterystyki promieniowania Jednostka, jednostka obliczeniowa względnych elementów współrzędnych prezentu, próg, wytwarzanie roztworu kalkulatora progowego, wskaźnika, aktywne elementy daru, a także charakterystyki aktora korelacji z opóźnieniem sygnałów.
Wynalazek dotyczy pola hydroaktoustyki i może być używany do wykrywania obiektu w środowisku morskim i pomiarze współrzędnych. Wynik techniczny z zastosowania wynalazku jest zmierzenie odległości do obiektu odbicia w nieznanym czasie promieniowania oraz miejsce produkcji, co zwiększa wydajność stosowania środków hydroakustycznych. Aby osiągnąć ten wynik techniczny, sygnał wybuchowy jest promieniowany w środowisku morskim, otrzymując sygnał odbity przez odbiornik szerokopasmowy, analizę częstotliwości wielokanałowej sygnału odbijanego, mapowanie na wskaźnik widma z wyjścia kanału, wytwarza autonomiczną instalację i podważanie Źródło sygnału wybuchowego, zmierzyć zależność prędkości dźwiękowej z głębokości, mierzona poziom zakłóceń w pasku odbioru jest określona przez próg wykrywania, odbieraj sygnał propagacji sygnału do przodu, który przekroczył wybrany próg wykrywania, określ Czas recepcji naprzód sygnału propagacji z Źródło wybuchowego do odbiornika TPRA, pomiar spektrum sygnału propagacji do przodu, który przekroczył próg wykrywania, określa szerokość widma sygnału bezpośrednia propagacja w pasie urządzenia odbierającego, sygnał, odzwierciedlenie od Obiekt, określ czas odbierania sygnału odzwierciedlonego Taho, zmierzyć widmo sygnału odbite, określ pasek spektralny kompaktowy Sygnał avley odzwierciedlony przekroczył próg detekcji Fakho określa odległość do obiektu za pomocą wzoru Dismo \u003d K (FPram-FAS), gdzie K jest współczynnikiem, który określa tłumienie częstotliwości widma sygnału podczas rozkładu, z disp\u003e (Techno TPRIM) z, gdzie - prędkość dźwięku. 1 il.
Wynalazek dotyczy pola hydroaktoustyki i może być wykorzystywany do konstruowania systemów do wykrywania sygnałów dźwiękowych hydrolitytorów zainstalowanych na przewoźniku ruchomym. Wynik techniczny z zastosowania wynalazku jest zapewnienie możliwości określenia zmiany kąta prędkości ruchu źródła sygnału sondy, zmiany prędkości w kierunku jego ruchu. Aby osiągnąć określony wynik techniczny, wybrany jest sekwencyjny odbiór sygnałów sondowania źródła ruchomego, określający czas przybycia pierwszego odebranego sygnału wykrywania, znamienny tym, że wprowadzono nowe operacje, a mianowicie: momenty czasu Ti Otrzymanie kolejny N sygnału sondowego, gdzie n nie jest mniejsza 3, określ przedział czasu TK między momentami przybycia każdego dwaj, zgodnie z każdym innym sygnałami sondowania TK \u003d TI + 1-Ti, określ różnicę między mierzoną Przedziały czasu ΔTM \u003d TK + 1-TK, gdzie m jest numer pomiaru odstępów czasu sekwencyjnego, określić różnicę w przedziałach czasowych, pamiętaj o różnicę przedziału pierwszej, określ następującą różnicę przedziału czasu, jeśli różnica interwałowa ma znak negatywny , określ cosinus kąt ruchu kursu źródła, jako stosunek każdej kolejnej różnicy w pierwszej przerwie przedziału, określają zajęcia Źródło źródła sygnałów brzmiących, jako wartości, odwrotny cosinus mierzonego związku, jeśli zmierzona wartość różnicy jest dodatnia, a następnie usunięto źródło sygnałów sondowania, a cosinus kąta jest obliczany jako stosunek pierwszej różnicy dla każdego późniejszego. 1 z.p. F-lies, 1 yl.
Wynalazek dotyczy pola hydroaktoustyki i może być stosowany w zadaniach określania klasy obiektu podczas opracowywania systemów hydroakustycznych. Zaproponowana jest klasyfikacja sygnałów hydroakustycznych emisji hałasu obiektu morskiego, który obejmuje sygnał anteny odbierającej emisję hałasu obiektu morskiego w mieszaninie dodatku z zakłóceniami anteny hydroakustycznej, konwersję sygnału do widoku cyfrowego, przetwarzanie widmowe odebrane sygnały, nagromadzenie uzyskane widma, wygładzając spektrum według częstotliwości, określenie progu wykrywania na podstawie prawdopodobieństwa fałszywych alarmów i gdy próg wykrywania bieżącego widma zostanie przekroczona w tej częstotliwości decyzji w zakresie obecności dyskretnego składnika, Zgodnie z którym obiekt morski jest sklasyfikowany, w którym sygnały obiektu morskiego w mieszaninie dodatku z zakłóceniami są przyjmowane przez dwa półpleby anteny hydroakustycznej, wytworzono przetwarzanie widmowe odebranych sygnałów jest wytwarzane w Seitses of the Semi - podsumowano widma mocy na wyjściach dwóch pół -TENTENES, określenie całkowitego spectrum zasilania s σ 2 (ω k), znajdź różnicę s δ 2 (ω k) widma zasilania na wyjściach dwóch półpośrednich , określona różnica S2 (ω k) σ - Δ ¯ \u003d s σ 2 (ω k) ¯ - s δ 2 (ω k) ¯ - s δ 2 (ω k) ¯ - spektrum zasilania emisji hałasu obiektu morskiego i Obecność dyskretnych składników są oceniane przez emisję hałasu do wykrywania częstotliwości obiektu morskiego. Zapewnia to eliminację wpływu widma interferencyjnego podjętego przez boczne pole charakterystyczne dla kierunku anteny hydroakustycznej i prawidłowej definicji znaków widmowych klasyfikacji. 1 il.
Wynalazek dotyczy radaru, w szczególności do urządzeń do określania współrzędnych obiektów emitujących sygnały akustyczne, przy pomocy geograficznie oddzielonych czujników światłowodowych - liczników ciśnienia dźwięku. Wynik techniczny jest wzrost dokładności określania lokalizacji i rozpoznawania typu obiektu, oszacując kompozycję widmową jej parametry hałasu akustycznego. Wynik techniczny jest osiągany przez wprowadzenie drugiej pętli do przesyłania impulsów optycznych innej długości fali i sekwencyjnego łańcucha węzłów: (2N + 3) - pod przewodnika światła, trzeci FPU, drugi generator impulsów, drugie źródło promieniowania optycznego ( 2N + 4) -th Fiber. 1 il.
Wynalazek dotyczy pola hydroaktoustyki i ma na celu określenie parametrów hałasu obiektów w morzu. Zbadaj sygnał hałasu hałasu obiektu morskiego, porównując go z sygnałem prognozowany, dynamicznie utworzonym do kombinacji domniemanego hałasu obiektu i odległości do obiektu, określając współczynnik korelacji. W maksimum funkcji zależności współczynnika korelacji w zamierzonym hałasie obiektu oraz szacunkowa odległość do obiektu wspólnie określa ocenę hałasu obiektu i oszacowanie odległości do obiektu. Efektem technicznym wynalazku jest zwiększenie dokładności oszacowania hałasu obiektowego z jednoczesnym zmniejszeniem całkowitej liczby operacji arytmetycznych podczas oceny hałasu obiektu i odległości do obiektu. 2 il.
Wynalazek dotyczy akustycznych opór (AP), lokalizatorów akustycznych (Al) i mogą być stosowane do określenia łożyska źródła dźwięku (z). Celem wynalazku jest zwiększenie precyzji ustalenia kierunku z powierzchni Ziemi nachylonej do płaszczyzny horyzontu, gdzie znajduje się antena akustyczna i zmniejsza czas na definicję łożyska tego źródła. Belayer z B. ta metoda Określ w następujący sposób: Zmierz temperaturę powietrza, prędkości wiatru, kąt kierunkowy jego kierunku w warstwie powierzchni atmosfery i wprowadzenie ich do elektronicznej maszyny komputerowej, opisanej wzdłuż mapy topograficznej. specjalna uwaga (Row), gdzie można umieścić pozycje przeciwpożarowe artylerii i moździerzy, wybierz płaską powierzchnię w przybliżeniu prostokątny kształt o długości co najmniej trzysta metrów i szerokości co najmniej dziesięciu metrów, co byłoby przybliżone prostopadle Kierunek na przybliżonym środku rowu, zmierzyć kąt nachylenia tego placów zabaw do płaszczyzny horyzontu i, biorąc pod uwagę ten kąt, przy użyciu urządzenia optycznego-mechanicznego i szyny Rangeder, ustaw SP w specjalnym sposób na ziemi, zaakceptować sygnały akustyczne i zakłócenia, przekształcić je w sygnały elektryczne i zakłócenia, przetwarzane w 1 i 2 kanałach przetwarzania sygnałów AP lub Al, określonych na wyjściu tych kanałów stałych napięć U1 i U2, co dopiero z Row, odejmuj od napięcia U1 U2, złożyć te napięcia, różnica różnica jest uzyskiwana do ich suma i automatycznie zgodnie z programem, obliczana jest prawdziwe łożysko źródła dźwięku α. 8 lat.
Wynalazek dotyczy pola hydroaktoustyki i może być stosowany w rozwoju układów oznaczania współrzędnych zgodnie ze ścieżką redukcji hałasu kompleksów hydroakustycznych. Sposób obejmuje odbieranie sygnału hałasu hydroakustycznego anteny hydroakustycznej, utrzymywanie celu w trybie bezwzględnim, analizę widmową sygnału hałasu hydroakustycznego w szerokim pasma częstotliwości, określenie odległości do celu, odbiór sygnału hałasu hydroakustycznego jest generowany W połowie anteny hydroakustycznej mierz wzajemne widmo między sygnałami hałasu hydroakustycznego, podjęto połowę anten hydroakustycznych; Zmierzyć funkcję autokorelacji tego wzajemnego widma (ACF); Mierzona jest częstotliwość nośnika Fryzji Autokorelacji, różnica między zmierzoną częstotliwością nośnikową a częstotliwością przewoźnika odniesienia sygnału emisji hałasu jest celem fetalonu mierzonego przy niskiej odległości (FISM FISM), a odległość do Cel zależy od wzoru D \u003d (Fizm Fizm) K, gdzie K współczynnik proporcjonalności, który jest obliczany jako stosunek zmian w częstotliwości nośnej funkcji autokorelacji na odległość jednostkową przy określaniu częstotliwości odniesienia. 1 il.
Wynalazki odnoszą się do pola hydroaktoustyki i mogą być stosowane do kontrolowania poziomu emisji hałasu podwodnego obiektu w wynalazku zbiornika. Wynik techniczny uzyskany z wprowadzenia wynalazków jest uzyskanie możliwości pomiaru poziomu hałasu podwodnej spławowej bezpośrednio z samego skamieniania. Ten wynik techniczny jest osiągnięty przez fakt, że moduł (y), wyposażony w hydrofony, podniesienie modułu pomiarowego (IM), a poziom emisji hałasu mierzy się za pomocą go. Jest wyposażony w system sprawdzania jego wydajności bez demontażu urządzenia. 2n. oraz 11 z.p. F-LS, 3 yl.
Urządzenie (100) do rozwiązywania niejednoznaczności przed szacunkiem (105) Doa (φ ^ Amb) zawiera analizator (110) szacunków DOA do analizy szacunkowej (105) Doa (φ ^ Amb) w celu uzyskania zestawu (115) Niejednoznaczne parametry analizy (φ ~ i ... φ ~ n; f (φ ~ i) ... f (φ ~ n); fenh, ja (φ ^ am) ... fenh, n (φ ^ amb); GP (φ ~ i). ..GP (φ ~ n); d (φ ~ i) ... D (φ ~ n)) za pomocą informacji (101) przemieszczenia i informacji (101) Przemieszczenie jest stosunek (φ ^ ↔φ) między wysiedlonym (φ ^) i nieformowaną oszacowaniem DOA (φ) i bloku (120) pozwolenia na niejednoznaczność w celu rozwiązania niejednoznaczności w zestawie (115) niejednoznacznych parametrów analizy (115) niejednoznacznych parametrów analizy ( ~ ~ i ... φ ~ n; f (φ ~ i) ... f (φ ~ n); fenh, i (φ ^ amb) ... fenh, n (φ ^ amb); gp (φ ~ i) ... GP (φ ~ N); D (φ ~ i) ..d (φ ~ n)), aby uzyskać jednoznaczny dozwolony parametr (φ ~ res; Fry, 125). 3n. i 12 zp. F-li, 22 lat.
Wynalazek dotyczy pola hydroaktoustyki i może być stosowany jako uzbrojenie hydroakustyczne okrętów podwodnych różnych celów, a także podczas podwodnych prac geologicznych i hydroakustycznych oraz badań. Kompleks obejmuje ścieżki redukcji hałasu głównego i dodatkowego, ścieżkę wykrywania sygnału hydroakustycznego, ścieżka hydrolicitacji, ścieżki komunikacyjnej i ścieżki identyfikacyjnej, ścieżkę ministerstwa i wykrywanie przeszkód nawigacyjnych, centralny system obliczeniowy, system wyświetlania, rejestrację, Dokumentacja i kontrola i całkowita opona. W tym przypadku wszystkie promieniujące anteny ścieżki hydrolenia są wykonane elektronicznie sterowane zarówno przez liczbę belek charakterystyki orientacji, jak i ich szerokości i kierunku. Główna ścieżka usuwania szumów zawiera główną antenę odbierającą nosową i pierwsze urządzenie wstępne. Ścieżka wykrywania sygnałów hydroakustycznych zawiera trzy anteny odbierające i drugie urządzenie do przetwarzania wstępnego. Ścieżka hydrotania zawiera trzy anteny sterowane elektronicznie i pierwsze urządzenie generatora. Ścieżka komunikacyjna i identyfikacja zawiera dwa anten promieniujące i drugie urządzenie generatora. Ministand Ministand and Development Dystrybucja Obowiązek zbudowany Antennes, Transfer transferu, Departament Generalny i pragnienie urządzenia wstępnego przetwarzania. Dróg dodatkowej redukcji hałasu zawiera elastyczną rozszerzoną antenę holowaną, kabel kablowy, bieżące urządzenie kolektorowe i czwarte urządzenie wstępne. Wynik techniczny: Poprawa działania działania gazu i zakres wykrywania celów w trybie GL. 1 il.
Rozdział 1. Analiza głównych metod określania lokalizacji źródła sygnałów nawigacyjnych z koralikami Ultra-gwint.
1.1. Ustawianie problemu opracowywania hydroakustycznego kompleksu nawigacyjnego.
1.1.1. Doświadczenie IPMT w rozwoju systemów nawigacji nawigacyjnej dalmierza.
1.1.2. Zadania rozwijania Hansa-UCH.
1.2. Metody amplitudy do określenia informacji oświetlenia z antenami o małej ilościach (ultra składnik).
1.2.1. Liniowa antena równoważna.
1.2.2. Okrągła antena równoważna.
1.2.3. Potencjał do dokładnej twarzy opóźnienia amplitudy.
1.3. W celu pomiaru przesunięcia fazy dwóch sygnałów tonalnych MESVD, zniekształcony szum.
1.4. Szacowany kierunek fazy znalezienie formuł w systemach z prostymi antenami konfiguracyjnymi.
1.4.1. Odbiornik typu Bay-Element.
1.4.2. Odbiornik czterech elementów.
1.4.3. Opóźnienie fazy sześciokelanowej.
1.5. Metoda wyczerpania źródła sygnałów nawigacyjnych przy użyciu kołowych anten dyskretnych z dużą liczbą elementów.
1.5.1. Wyjście szacowanych wzorów i oceny błędu UB-DEERALER z kołową bazą.
1.5.2. Algorytmy kierunkowe dla wyszukiwarki kierunku z kołową bazą, z uwzględnieniem zmian w orientacji antenowej kątowej.
1.6. Wnioski.
Rozdział 2. Statystyczny przetwarzanie informacji o systemie nawigacyjnym hydroakustycznym z podstawą Ultrashort.
2.1. Rozwiązywanie zadania diabelowania na podstawie metod przetwarzania statystycznego.
2.2. Równania diabelniowe dla anten wielokierunkowych różnych konfiguracji.
2.2.1. Liniowa antena wieloetermetyczna.
2.2.2. Antena z dowolną liczbą elementów na okrągłej bazie danych.
2.2.3. Antena czteroetenna.
2.2.4. Antena kołowacza z dodatkowym elementem w środku.
2.2.5. Antena dwuosobowa.
2.2.6. Wnioski.
2.3. Cechy przetwarzania wielu sygnałów nawigacji częstotliwości.
2.4. Konfiguracja antenowa i potencjalna ocena dokładności.
2.4.1. Anteny z odległością półfali między elementami.
2.4.2. Revrkred anten.
2.4.3. Wybierz sektor przeglądowy na podstawie fazowania antenowego.
2.5. Wnioski.
Rozdział 3. Metodologia oceny dokładności systemów nawigacyjnych z ultra-śrubą podstawą.
3.1. Ocena systematycznego składnika błędu definicji łożyska.
3.1.1. Funkcja fazy niedoskonałego multi-elementu anteny odbierającej.
3.1.2. Rozwój sprzętu do certyfikacji metrologicznej otrzymywania anten wieloetrycznych.
3.1.3. Studia eksperymentalne o dokładności anten w warunkach laboratoryjnych.
3.2. Szacunki dokładności wyszukiwarki kierunku szerokopasmowego (badanie właściwości anteny do przetwarzania sygnału nawigacyjnego wielu częstotliwości).
3.3. Eksperymentalne badania głównych cech systemu nawigacyjnego ultracyjnego w warunkach małego morza.
3.3.1. Metoda certyfikacji systemu poprzez porównanie z danymi certyfikowanego systemu nawigacyjnego (na przykładzie Hans-DB).
3.3.2. Metody oceny dokładności pomiarów kątowych przez dane o padfonie.
3.3.3. Sposób ukończenia Ultra-Voltage-Base System nawigacyjny w warunkach na pełną skalę przy użyciu nawigacji odniesienia.
3.3.4. Uzasadnienie metrologiczne do ukończenia Ultra-Voltage-Base System nawigacyjny zgodnie z Hans DB i GPS.
3.4. Ocena charakterystyki metrologicznej Hans-UBB pod głębokim morzem.
3.5. Wnioski.
Rozdział 4. Metody konstruowania i rozwijania głównych elementów układu komunikacyjnego hydroakustycznego urządzenia podwodnego. 146 4.1. Ogólne podejście do oceny głównych parametrów Gass dla ANCA.
4.1.1. Generał.
4.1.2. Na strukturze symbolu informacji.
4.1.3. O synchronizacji.
4.1.4. W wyborze impulsu do oceny charakterystyki kanału komunikacyjnego.
4.1.5. Przetwarzanie bloku danych.
4.1.6. Modelowanie numeryczne kanału komunikacyjnego. 153 4.2.0 Rozwój szerokopasmowych piesrawerterów i anten dla Gass.
4.2.1. Cylindryczne metody Piezo szerokopasmowe.
4.2.2. Cylindryczne pierawertery z kontrolowanymi właściwościami
4.2.3. Szerokopasmowe tłokami typu Piezo-formery.
4.2.4. O dopasowaniu elektrycznego pierawrawerterów w szerokim pasma częstotliwości.
4.2.5. Na temat efektywności energetycznej przetworników szerokopasmowych.
4.2.6. Charakterystyka rozwiniętych anten.
4.3. Odbiornik wielokierunkowy sygnałów Gass z adaptacyjną kontrolą HN zgodnie z kierunkiem systemu nawigacyjnego.
4.3.1. Przetwarzanie danych.
4.3.2. Charakterystyka anteny UBB podczas odbierania sygnałów systemu komunikacyjnego.
4.4. Eksperymentalne badania nie spójnego wielokrotnego częstotliwości systemu komunikacji z korektą amplitudy stosunku przekładni kanału.
4.4.1. Algorytm do przetwarzania sygnału wielu częstotliwości.
4.4.2. Schemat strukturalny Systemy komunikacji.
4.4.3. Studia eksperymentalne elementów systemu komunikacji hydroakustycznej w warunkach małego morza.
4.5. Wnioski.
Rozdział 5. Opracowanie opóźnienia Dopplera w ramach systemu nawigacji pokładowej urządzenia podwodnego.
5.1. Anten.
5.2. Obróbka widmowa krótkich sygnałów impulsowych.
5.3. Struktura i obwód.
5.4. Badania zagraniczne charakterystyki LGD jako część ANCA.
5.5. Wnioski.
Rozdział 6. Wdrożenie techniczne i doświadczenie praktycznego stosowania środków hydroakustycznych nawigacji robota podwodnego. 207 6.1. Techniczne wdrożenie systemu nawigacji hydroakustycznej z podstawą ultra-śruby.
6.1.1. Schemat strukturalny Hansa-UKB.
6.1.2. Cechy sprzętu budowlanego.
6.1.3. System nawigacji antenowej recepcji.
6.1.4. Przetwarzanie danych.
6.1.5. Interfejs użytkownika.
6.1.6. Oprogramowanie.
6.1.7. Testy zagraniczne i praktyczne działanie Hansa-UKB.
6.2. Specyfikacje Gass sprzęt do zestawu.
6.2.1. Główna charakterystyka.
6.2.2. Zasada działania.
6.2.3. Strukturalny diagram odbiornika.
6.2.4. Struktura sygnału gazowego.
6.2.5. Wyniki testów morskich w głębokim morzu.
6.3. Kompleks nawigacji hydroakustycznej.
6.3.1. Skład i cel kompleksu nawigacji statku.
6.3.2. Techniczne propozycje rozwoju połączonego systemu nawigacyjnego i zarządzania.
6.4. Złożone badania nawigacji hydroakustycznej i doświadczenia w ich wykorzystaniu podczas prawdziwej pracy.
6.4.1. Złożone testy nawigacyjne.
6.4.2. Doświadczenie praktyczne zastosowanie Narzędzia do nawigacji hydroakustycznej podczas prawdziwych wyszukiwarek.
Zalecana lista rozpraw
Opracowanie metod i algorytmów do nawigacji jednokierunkowej autonomicznych niezamieszkanych okrętów podwodnych 2013, kandydat nauk technicznych Dubrowin, Fedor Sergeevich
Metody przetwarzania sygnałów hydroakustycznych otrzymanych w strefie Systemów odbierających i emitowania Fresnela 2010, Doktor Nauk Technicznych Kolmogorov, Vladimir Stepanovich
Podwodne i nawigacja przy użyciu pola elektromagnetycznego 2006, Doktor Nauk Technicznych Shibkov, Anatoliad Nikolaevich
Metody i systemy do poprawy bezpieczeństwa żeglugi na podstawie urządzeń nawigacyjnych hydroakustycznych z liniową podstawą odbiorników kierunkowych 2006, Doktor Nauk Technicznych Zavyalov, Wiktor Valentinovich
Nawigacja autonomicznego urządzenia podwodnego przy pomocy wewnętrznego układu nawigacji inercyjnej 2017, kandydat na nauki fizyczne i matematyczne Filatova, Gusel Amirovna
Podobne prace rozprawowe. w specjalności "Acoustics", 01.04.06 Cifra Vac
Rozwój metody zwiększania dokładności pozycjonowania podwodnych obiektów 2013, kandydat na głowice nauk technicznych, Alexander Alexandrovich
Parametryczna metoda kontrolowanej transformacji hydroakustycznych pola hałasu emisji naczyń badawczych i rybackich, metod i systemów ich pomiaru opartych na nieliniowych wzorcach akustycznych 2002, kandydat nauk technicznych Khaliulov, Fargat Amershanovich
Opracowanie algorytmów przetwarzania informacji w systemach wielokrotnych przy użyciu szybkiej analizy widmowej sygnałów 2005, kandydat nauk technicznych Davletkaliyev, Roman Kuanishevich
Metody i środki nawigacji wspierają sterowania samolotem i ruchem lotniczym na podstawie technologii satelitarnych 2004, lekarz nauk technicznych SLEPCHENKO, Peter Mikhailovich
Teoria i metody projektowania systemów antenowych Ultra-szerokopasmowe do montażu radiowego i mobilnego oparcia 2011, Doktor Nauk Technicznych Rebovsky, Yuri Anatolyevich
Zawarcie rozprawy na ten temat "Acoustics", Matvienko, Yuri Viktorovich
Wyniki główne:
1. Zasady zbadane są zasady konstruowania systemów ultra-kropkowanych oraz analizę podstawowych metod określania pozycji kątowej źródła źródła tonalnych i szerokopasmowych sygnałów nawigacyjnych podczas przetwarzania informacji o niewielkich rozmiarach anten odbiorowych badano.
Otrzymano szacunkowe wyrażenia, a zbadano kierunek znalezienia charakterystyki amplitudy opóźnienia z całkowitą i różnicą przetwarzania danych.
Niska potencjalna dokładność najprostszych systemów konfiguracji zawierających jedną, dwie lub trzy pary odbiorników ortogonalnych odnotowano metodami przetwarzania danych fazowych i zapotrzebowanie na komplikację w celu zwiększenia dokładności.
Metoda kierunku znalezienia źródła sygnałów tonalnych na podstawie stosowania anten z dużą liczbą odbiorników ściśle umieszczone na okrągłej podstawie z definicją fazy skumulowanej jest również zaproponowany, którego błąd może potencjalnie zmniejszyć do 0,1gradusu.
Obliczone formuły i na przykładzie anten okrągłych z dużą liczbą elementów są wyświetlane podłączenie danych czujnika kursu, rolki i różnicę i ich błędy na wartości zmierzonych parametrów nawigacyjnych i ich błędów.
W oparciu o maksymalną zgodną z prawdą, zadanie statystycznego przetwarzania danych nawigacyjnych został rozwiązany podczas stosowania dyskretnych anten dowolnej konfiguracji. W tym przypadku ocena pożądanych parametrów jest określana przez wspólne przetwarzanie wszystkich par kanałów wykonanych z różnymi skalami. Współczynniki wagi zawierają jako składnik geometryczny, równy pochodnej funkcji fazowej zgodnie z mierzonym parametrem i energią równą sygnału sygnału do działania w kanale.
Szacowane relacje pochodzą do definicji łożyska i błędu tłumienia dla wielu typowych konfiguracji antenowych: liniowy, kołowy, połączony.
Wyszukiwarka kierunku fazy została opracowana na podstawie stosowania anten okrągłych o dużej wielkości fal z ograniczoną liczbą elementów.
Technologia zmniejszenia liczby kanałów przetwarzania z zachowaniem rozdzielczości kątowej jest uzasadniona poprzez oddzielenie procedury przepuszczania na dwa etapy: zgrubny kierunek ustalenia w celu określenia sektora oglądania i dokładnego roztworu równania łożyska w danym przybliżeniu początkowym.
Możliwość poznania niejasności fazy powstających podczas operacji rzadkich anten dzięki metodom ustalenia kierunku amplitudy była uzasadniona.
Teoretycznie uzasadnione osiągnięcie rozdzielczości kątowej 0,1-0,2 stopnia z liczbą kanałów 6-8 i wielkości fal antenowej 3-5 długości fal częstotliwości nawigacyjnej.
Relacje do obliczania łożyska niewielkiej dyskretnej anteny, czas propagacji sygnału akustycznego na otwór, który jest porównywalny ze średnią częstotliwością otrzymanego widma.
2. Metody badawcze do oceny dokładności Dokładności UKB HANS i opracowane metody pomiaru ich charakterystyki w warunkach laboratoryjnych i narzędziowych.
Aby opisać dyskretną antenę multi-elementu, zaproponowano funkcję wektorową, której każdy składnik opisuje dedykowany element uzależnienia antenowego fazy sygnału akustycznego z kierunku przybycia. Dokładna (eksperymentalna) definicja funkcji jest obowiązkowa podczas rozwiązywania zadania opóźnienia obiektu nawigacyjnego.
Stojak na certyfikację anten wieloelementowych, który jest zainstalowany w specjalistycznym basenie hydroakustycznym i obejmuje źródło regulowanych sygnałów i systemu odbierającego z precyzyjną platformą obrotową i urządzeniami do pomiaru fazy wielokanałowej do sygnałów typu impulsów radiowych.
Opracowano technologię certyfikacji antenowej, która polega na eksperymentalnie pomiaru funkcji fazowej anteny, określenie funkcji analitycznych, które przybliżają uzyskane dane i ich wykorzystanie w rozwiązywaniu równań dotyczących wyszukiwania kierunkowskazów, z tabulacją różnicy Pochodzenie łożyska i jego prawda (instalacja) wartość w formie oceny systematycznego składnika błędu.
Opracowywane są anteny odbiorcze wielokierunkowe do aktywnych próbek systemów, które zapewniają wartość błędu systematycznego około 0,5 aradusu.
Wykonana jest analiza porównawcza pracy Hansa DB i UBB w warunkach małego morza o stałej instalacji ACB Active Antenna.
Przeanalizowano metodę oszacowania względnych pomiarów kątowych w oparciu o przetwarzanie danych o padfonu.
Metoda certyfikacji systemu UCB w małym morzu przy użyciu nawigacji odniesienia w oparciu o przetwarzanie danych o padfonu jest uzasadnione. Pokazano, że z względnym błędem pomiaru zakresu, kilku dziesiątych procent, błąd wartości projektowej łożyska dla Annea, co czyni ruch wokół UKB - antenę i latarnię morską na zamkniętym trajektorii, nie przekracza jednego stopnia .
Przeprowadzono analizę i określono charakterystykę dokładności systemu UCB na podstawie wyników pracy w warunkach głębokiego morza. Jako dane odniesienia, stosowano dane DB Hans, system nawigacji pokładowej i czujnik głębokości, dane o padfonu. Wykonana jest wykonalność analizowania zmienności różnicowej danych o padfonu w celu zidentyfikowania poszczególnych fragmentów trajektorii ruchu ANPA i możliwość rozsądnego uśredniania danych kątowych z przetwarzaniem trajektorii. W wyniku analizy wniosek jest uzasadniany błędem pomiarów kątowych około 0,5.
Technika wyeliminowania niejasności fazy wynikających z zwiększenia wielkości bazy pomiarowej jest uzasadnione i eksperymentalnie przetestowane przez przetwarzanie statystyczne sygnałów wielorodzinnych.
Wieloewipowy antena odbierająca i wyposażenie promieniowania (odbioru) opracowano i eksperymentalnie badano, dokonano szacunków błędu systemu, które stanowią dziesiąte dziesiąte grad.
3. Zbadane są metody i środki szybkiego systemu transmisji informacji dla kanału hydroakustycznego z Rady ACPA do statku zapewniającego.
Rozwinięto badania budowy szerokopasmowych konwerterów piezo, a wyspecjalizowane konwertery cylindryczne i prętowe zostały opracowane ze specjalnymi cechami orientacyjnymi przeznaczonymi do pracy w sprzęcie systemu komunikacyjnego: wysoce wydajny cylindryczny konwerter zaproponowano z przepustowości do trzech oktawy za pomocą cienkich dopasowanych warstw rogu Konfiguracja, która spełnia wymagania dotyczące pracy w małym morzu; Różnorodność rezonansowego konwertera proponuje się na promieniowanie i odbiór sygnałów wielorodzinnych, wykonanych w postaci zestawu koncentrycznych piezocylindrów; Piezoprawertery tłokowe proponuje się jednostronnym typem HN do pracy w kanale propagacji sygnału pionowego.
Przeanalizowano strukturę systemu transmisji danych dla kanału wieloznacznego komunikacji z dostosowaniem obwodu przetwarzania przez blok danych końcowej długości. Transmisja bloku informacyjnego jest poprzedzona procedurą ustawiania ustawień odbiornika, tymczasowy rozmiar bloku jest określony przez aktualny stan kanału komunikacyjnego. Metody modelowania numerycznego przeanalizowały cechy wyboru sygnałów podłączonych i pokazuje celowość stosowania sygnału do łączenia fazy i manipulacji częstotliwości.
Metodologia szacowania charakterystyk impulsów kanału komunikacyjnego i udoskonalenia momentu synchronizacji proponuje się i przetwarzanie serii impulsów fazy przemiennej.
Proponowany jest schemat odbierania systemu sygnalizacyjnego systemu komunikacji multi-elementowej anteny nawigacyjnej z wdrażaniem filtrowania przestrzennego bezpośredni promień W warunkach dystrybucji multipath na podstawie danych dotyczących kątowej pozycji źródła sygnałów i zakłóceń, uzyskanych podczas pracy Hans UKB.
Badania zostały wykonane i uzasadnione możliwość transmisji informacji w kanale komunikacji wieloczęstownej z wstępnym wyrównaniem odpowiedzi poprzez częstotliwość amplitudy w kanale i wybierając bieżący komunikat na podstawie porównawczej analizy energii w każdym kanale częstotliwości. Studia eksperymentalne o takim systemie przetwarzania w bardzo małym morzu potwierdziły możliwość stosowania sprzętu do transmisji graficzne obrazy Przy prędkości około 3000bit / s z niskim prawdopodobieństwem błędów.
4. Na nawigację na pokładzie robot podwodny jest zaprojektowany i zintegrowany z kompleksowym opóźnieniem Dopplera.
Badania zakończone i rozwinęły wyspecjalizowane anten opóźnione o wysokiej czułości echa uzyskanym z powodu optymalnej koordynacji mechanicznej akustonowej Piezo metodom antenowy z środowiskiem pracy.
W celu zwiększenia prędkości opóźnienia proponuje się metodę przetwarzania spektralnego krótkotrwałych sygnałów impulsowych, zapewniając rozdzielczość wysokiej częstotliwości ze względu na tworzenie długich quasi spójnych wdrażania sygnałów odzwierciedlonych. Metoda umożliwia określenie elementów prędkości z minimalną dyspersją w ciągu jednej sekundy.
Zaprojektowany i używany jako część Próbki Eksperymentalnej Próbki Dopplera ANPA
Technika ukończenia opóźnienia w warunkach na pełną skalę została opracowana przez obliczenie prędkości ANPA w zakresie znalezienia danych Hansa.
5. Zaprojektowany, przetestowany i przetestowany w operacjach rzeczywistych kompleksu hydroakustycznego, co zapewnia tworzenie informacji o informacjach nawigacyjnych ruchu misji na pokładzie dostarczania statku i ANCA, składający się z narzędzi nawigacyjnych hydroakustycznych, transmisji informacji i pomiaru absolutnego prędkość.
Zaprojektowany, przetestowany w małym i głębokim morzu i zintegrowany z kompleksem nawigacyjnym Hans UKB, który obejmuje: zsynchronizowane źródło sygnału nawigacyjnego w obiekcie, kompleks przetwarzania statku z anteną odbierającą na kablu kablowym, odbiornik GPS. System ma następujące cechy: zakres - 6-10 km; Błąd pomiaru łożyska jest mniejszy niż 1 stopień; Błąd pomiaru granicy wynosi 0,5%. Eksperymentalnie potwierdził możliwość obsługi systemu w pozycji położenia ANCA, co spowoduje długą przejście wzdłuż rozszerzonego obiektu z ruchem naczynia dostarczającego i holowanie anteny odbierającej z prędkością do 5 węzłów.
Zaprojektowany, testowany i używany jako część ukrytego urządzenia o wysokiej częstotliwości systemu nawigacji UKB z umieszczeniem źródła na pokładzie naczynia i odbiornika na maszynie.
Zaprojektowany i przetestowany w składzie hydroakustycznego środka nawigacji i wsparcia informacyjnego, sprzęt do transmisji urządzeń APA do kontroli operacyjnej stanu nadzoru i prac wyszukiwania w warunkach głębokiego morza i kanału komunikacji pionowej. Sprzęt zapewnia transmisję danych z prędkością 4000bit / s, z prawdopodobieństwem błędów około jednego procenta, co zapewnia transmisję ramek obrazu dla 45 ° C.
Zaprojektowany, przetestowany i zintegrowany z systemem nawigacyjnym na pokładzie Doppler LGD, zapewniając pomiar prędkości bezwzględnej ANCA w zakresie prędkości 0-2 m / s z błędem 1-2 cm / s.
Proponuje się technologię zastosowania kompleksu nawigacyjnego:
Hans DB - dla wielu biegów ANCA w dedykowanych obszarach z wyszukiwaniem w obszarach o zwiększonych wymagań dotyczących dokładności.
Hans UKB Jeśli nie ma już przejść podczas śledzenia rozszerzonych obiektów lub ruchomych celów, w przypadku awaryjnego rozpoczęcia ANCA, w przypadku usteźmiowych uruchamiania.<
Aby z obliczeniami trajektorii na numer - gdy ANCA jest zwolniona w określonym punkcie, przy dodawaniu do korzystania z systemów telewizyjnych.
Udane prace kompleksu w składzie ANC nie wykazuje się podczas wykonywania prawdziwych wyszukiwarek w oceanie.
Wdzięczność.
Podsumowując, chcę wyrazić głębokie uznanie wszystkim pracownikom IPMT, który uczestniczył w rozwoju i testowaniu systemów hydroakustycznych pojazdów podwodnych. Specjalne podziękowania dla Academician Ageev M.D. głowy regionu Kaskin, B. A. I Rylov N.i.
Wniosek
Referencje badań rozprawy doktor nauk technicznych Matvienko, Yuri Viktorovich, 2004
1. Ageev M.D. Modułowy autonomiczny pojazd bezzałogowy 1.TP. - MTS Journal, 1996, obj. 30, 1, str. 13-20.
2. Autonomiczne niezamieszkane pojazdy podwodne. Pod generałem. ACAD. Ageeva M, D. - Vladivostok, Dalnawka, 2000, 272c.
4. r.babb. AUV Nawigacja do podwodnych badań naukowych. Technologia morska, 1990, grudzień, str.25-32.
6. J. Romeo, G. Lester. Nawigacja jest kluczem do misji AUV. Technologia morska, 2001, grudzień, str.24-29.
7. Borodin V.I., Smirnov G.e., Tollova H.A., Yakovlev g.v. Narzędzia nawigacyjne hydroakustyczne. L., SIPBUIDING, 1983, 262C.
8. Miln P.H. Systemy pozycjonowania hydroakustycznego. L., SIPBUIDING, 1989,316C.
9. Gestone J.A., Cyr R.j., Roesler G:, George E.S. Ostatnie wydarzenia w akustycznej nawigacji podwodnej. Dziennik nawigacji, 1977, V.30, 2, str.246-280.
10. Boldrev B.c. Metody precyzyjne. Definicje współrzędnych podczas pracy hydrofizycznej na otwartym morzu. Przemysł stoczniowy za granicą, 1980 №2. C.29-42.
11. Kyslov A. F., Postnikov I.v. Charakterystyka dokładności systemów nawigacyjnych nawigacyjnych z długą bazą akustyczną. Tez. Dokl. 2 Union. . Badania i rozwój oceanu, L., 1978. MŚP SME.2, str.95-96.
12. Kasatkin B.a., Kobidy v.v. Cechy nawigacji hydroakustycznej w strefie półki. W SAT. Urządzenia podwodne i ich systemy, z DFFA, Władywostok, 1977, od 84-88.
13. Kasatkin B.a., Kobidy v.v. Synchroniczny system nawigacji z siedzibą wodną. Patent R.F. G01S 9/60, № 713278, 1978.
14. Smirnov G.e., Tollova N.A. Systemy nawigacyjne z hydroakustycznymi nawigacjami. Przemysł stoczniowy za granicę. 1980, №9, str.45-54.
15. K. Vestgard, R. Hansen, V. Jalving i H.pedersen. Wyniki badania Hugin 3000 AUV -Design i wyników pola.- / interwencja podwodna 2001 /.
16. T. Martin i G. Pilgrim. Wyzwania ankietowe w głębokich akustycznych USBL pozycjonowaniu pojazdów podwodnych holowanych lub uwięzionych. .- / podwodna interwencja 2001 /.
17. Hubert Thomas, Eric Petit. Z autonomicznych pojazdów podwodnych (AUV) do nadzorowania podwodnych pojazdów (SUV). Oceany-97.
18. Paramonov A.a., Klyuev M.c., Storozhev P.P. Niektóre zasady konstruowania systemów nawigacji hydroakustycznych z długą bazą danych. VII Interddes. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych", Moskwa, 2001, str.244-245.
19. Paramonov A.a., Afanasyev V.N. Hans-M System nawigacji hydroakustycznej. VI WNDY. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych", Moskwa, 2000, s. 100-112.
20. Ageev MD, Blidberg D.r., Kiselev Ji.B., Rylov N.i., Shcherbatyuk A.F. Państwo i perspektywy rozwoju podwodnej robotyki. Technologie morskie, Vladivostok, Dalnnalock, 2001, ISK.4, str.6-23.
21. Ageev MD, Casatkin B.a., Kiselev L.v., Molokov Yu.g., Nikiforv V.v., Rylebov N.i. Automatyczne podwodne pojazdy. L., stocznia, 1981,248 p.
22. J. Manley. Autonomiczne podwodne pojazdy do eksploracji oceanu. 0CeANs-2003, str.327-331.
23. Kobidzze v.v. Szybkość rozmnażania sygnałów hydroakustycznych w zakresie zakresów. Preprint, Władywostok, że Fedez Akademia Nauk ZSRR, 1979, 37C.
24. Kobidzze v.v. Badanie dokładności bólu hydroakustycznego. - autor rozprawy KF-M.n. Vladivostok, że DVTC Akademii ZSRR, 1981, 26c.
25. Xavier Lurton, Nicholas W. Millard. Wykonalność Vaiy-długi początkowy pozycjonowanie akustycznego SISTEM dla AUV. Postępowanie z oceanu-94, Brest-France, 1994, VOL.3, PP. 403-408.
26. Kasatkin B.a., Kosarev g.v. Cecha rozwoju APS do bardzo długiego zasięgu AUV. Postępowanie z Ocean-95, San-Diego, październik 1995, V. I, s. 175-177.
27. Kasatkin B.a. Synchroniczny system dalekiego zasięgu zsynchronizacji wodnej. Patent R.F. G01S 15/08, № 2084923, 1995.
28. Pozycjonowanie akustyczne. www. Mors.fr.Product.
29. Łączny zakres i czujnik nawigacji łożyska. Model NS-031. -www. Sonatech.com.Product.
30. Kasatkin B.a. Synchroniczny system nawigacji z siedzibą wodną. Patent R.F. G01S 15/08, № 2084924, 1995.
31. D. Thomson, S. Elson. Nowa generacja systemów pozycjonowania akustycznego. 0Ceans-2002, str.1312-1318.
32. Programowalny transponder ogólny i super sub-mini transponder / responder, typy 7971/7977/7978 7970/7973 www.sonardyne.co.uk
33. B. Manson. Ogólnokoletni pozycjonowanie z dokładnością LM. -International Ocean Systems, Desember 2001, p. 15-19.
34. Kasatkin B.a., Kosarev g.v. Fizyczne podstawy akustycznego. Biuletyn DVO R i998, №3.C.41-50.
35. Kobidzze v.v. Modele błędów i algorytmów do przetwarzania informacji w zakresie obligacji w systemach nawigacji hydroakustycznej. Predprint, Vladivostok, DVTC Akademii ZSRR, 1979, 42c.
36. Kasatkin B.a. Niezmienne cechy pola dźwiękowego na warstwowym oceanie. Dokl. Akademia Nauk o ZSRR, 1986, 291 №6, p. 1483-1487.
37. M.Deffenbaugh, J.g. Bellingham, N. Schmidt. Związek między pozycjonowaniem kulistą i hiperbolicznym. Kontynuowanie oceanu-96,
38. Kasatkin B.a., Kosarev g.v. Analiza dokładności pomiaru współrzędnych rekuktorów sygnalizatorów nawigacyjnych hydroakustycznego. Technologie morskie, wydanie.1. Vladivostok, Dalnaka, 1996, str.60-68.
39. Kasatkin B.a., Kosarev g.v. Zastosowanie metody przemierzającej do określenia absolutnych współrzędnych respondentów nawigacji. Technologia morska, VOL.2. Vladivostok, Dalnaka, 1998, str.65-69.
40. J. Opderbecke. Kalibracja w morzu Systemu pozytywnego pojazdu USBL. -Ceans "2000.
41. Posidonia 6000. System pozycjonowania aktoistycznego podwodnego. www.ixsea-ceano.com.
42. Newsletter. Kongsberg Simrad. Wydać nr 2-2000. www.kongsberg-simrad.com.
43. K. Vestgard, R. Hansen, B.Jalving, O.a. Pedersen. AUV AUV HUGIN 3000. Zaprawianie i wyników pola. 0Ceans "2001.
44. System śledzenia niskiego opłaty LXT. www.ore.com.
45. Thomas C. Austin, Roger Stokey, C. Von Alt, R. Arthur, R. Goldborough. Szczury, względny system śledzenia akustycznego opracowany do nawigacji o oceanach głębokich oceanów "97.
46. \u200b\u200bThomas C. Austin, Roger Stokey. Względne śledzenie akustyczne.- technologia morska, 1998, marzec, str. 21-27.
47. M. Watson, C. Loggines i Y.t. Ochi. Nowy system wysokiej dokładności Super Short Base Line (SSBL). Technologia podwodna, 1998, str.210-215, Tokio, Japonia.
48. James E. Deveau. Podwodne systemy pozycjonowania akustycznego. Oceany-95, VOL.1, p. 167-174, San Diego, USA.
49. Nautronix. ATS Dokładne pozycjonowanie www.nautronix.com.
50. Yin Dongmei, piosenka Xinjian, Feng Haihong. Kluczowa technologia do wdrożenia podwodnego śledzenia obiektu i układu pozycjonowania. -The 3-D Międzynarodowy Warsztat Harbin, Chiny, 2002, str.65.
51. Yin Dongmei, piosenka Xinjian, Feng Haihong. Projektowanie podwodnego systemu akustycznego. Międzynarodowy warsztat 3 D Harbin, Chiny, 2002, str. 43.
52. Komulakov B.a. Systemy hydroakustyczne z latarniami przez respondentów do śledzenia kompleksów holowanych pod wodą. - Shipbuilding, 1997, nr 6, str.39-45.
53. Paramonov A.a., Nosov A.v., Kuznetsov V.n., Dreuchsev S.a., Klyuev M.S.
54. Storozhev P.P. Na poprawie dokładności systemu nawigacyjnego hydroakustycznego z podstawą podstawą sultury. VII Międzynarodowy Potwierdź. Według oceanologii, M., 2001, str.80-81.
55. Bogorodski A.v., Koryakin Yu.a., Ostrukhov A.a., Fomin Yu.p. Technika badań technologii i oceanu hydroaktoustic. VII Międzynarodowy Potwierdź. Oceanologia, M., 2001, str.266-269.
56. Zlobina N.v., Kamenev S.i., Kasatkin B.a. Analiza błędu systemu nawigacyjnego hydroakustycznego z podstawą ultra śruby. W SAT. Podwodne roboty i ich systemy. Wydanie 5,1992, Vladivostok, IPMT DVO RAS, str.116-123.
57. Kasatkin B.a., Kulinchenko S.I., Matvienko Yu.v., Nurgaliev R.F. Badanie właściwości wyszukiwarki kierunku fazy dla UBB-Hans.- w SAT. Podwodne roboty i ich systemy. Vish.6,1995, Vladivostok, Dalnawka, str.75-83.
58. Kasatkin B.a. Ocena błędu UB-DEERALER z kołową bazą. W SAT. Technologia morska. Obłon. 1,1996, Vladivostok, Dalnawka, str.69-73.
59. Kasatkin B.a., Matvienko Y.V. Metoda określania łożyska na źródło promieniowania i urządzenia do jego wdrożenia. Patent RF nr 2158430, Bul. ISOBLE. NICA33, 2000
60. Matvienko Yu.v., Makarov V.n., Kulinchenko S.I. , Nurgaliyev R.F., Rylov r.n. System nawigacji hydroakustycznej z podstawą ultrashortową. Technologie morskie, Vladivostok, Dalnnock, 2000, rozładowanie, s. 102-113.
61. Matvienko Yu.v. Przetwarzanie danych w wyszukiwarce kierunku UB na podstawie niedoskonałej anteny wieloetermetycznej. VIII Interddes. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych" Moskwa, 2003, część 1, str.24-25.
62. John G. Proakis. Cyfrowa komunikacja. Wydawnictwo przemysłu elektronicznego, Chiny, Pekin, 2000, 928P.
63. M.stojanovic. Ostatnie postępy w szybkiej podwodnej komunikacji akustycznej. IEEE Journal Oceanic Engineering, Vol.2 L, No.2, 1996, s. 125-136.
64. M.stojanovic, J.CatiPovic, J.Proakis. Faza spójna komunikacja cyfrowa dla podwodnych kanałów księgowych. Ieee Dziennik Oceaniczny inżynieria, obj. 19, nie. 1, 1994, str.100-111.
65. Stojanovic M., J.A. CATIPOVIC i J.G. Proacis. Zmniejszona złożoność przestrzenna i czasowa przetwarzanie podwodnych sygnałów komunikacji akustycznej.- J. Acoust. SOC. Jestem., 98 (2), Pt.l, sierpnia. 1995, str.961-972.
66. J. Labat. W czasie rzeczywistym komunikacja podwodna. Ocean-94, Brest, Francja, VOL.3, str.501-506.
67. A.g. Besios, F.M. Kaimi. Odszkodowanie dla podwodnej komunikacji akustycznej. Ocean-94, Brest, Francja, VOL.1, str.317-322.
68. Lester R. Leblanc. Spatio-temporaal przetwarzanie spójnych danych komunikacyjnych akustycznych w płytkiej wodzie. IEEE J. Ocean. Eng. Vol.25, nr 1 stycznia 2000, str. 40-51.
69. Lester R. Leblanc. Adaptive Beamformer do komunikacji w płytkiej wodzie
70. B. Geller, V. Capellano, J.m. Brossier, A. Essebbar i G. Jourdain. Korektor do transmisji szybkości wideo w podwodnej komunikacie. IEEE J. Ocean. Eng. Vol.21, nr 2, APR, 1996, str. 150-155.
71. Billon D., Quellec B. Wyniki wysokich danych Akustyczne systemy komunikacji podwodnej przy użyciu adaptacyjnego wiązki i wyrównania. Ocean-94, Brest, Francja, VOL.3, str.507-512.
72. R. Coates. Podwodna komunikacja akustyczna. Technologia morska, 1994, nie. 6, s. 41-47.
73. A. Zieliński, Young-Hoon Yoon, Lixue Wu. Analiza wydajności cyfrowej komunikacji akustycznej w płytkim kanale wodnym. IEEE Dziennik Oceaniczny inżynieria, VOL.20, No.4, 1995, str.293-299.
74. L. WU i A. ZIELINKI. Odrzucenie wielopatrza za pomocą wąskiego belki akustycznej. -Ceans-88, Baltimore, str.287-290.
75. Wang C.H., Zhu Min, Pan Feng, Zhang X.J., Zhu W.q. MPSK Underwic Acoustic Communication Modem.
76. Seria ATM 870. Modemy telemetrii akustycznych. Instrukcja obsługi. - DataSonics, Febry 1999.
77. K. Scussel, J.Rice, S. Merriam. Nowy modem akustyczny MFSK do pracy w niekorzystnych podwodnych kanałach. Oceany-97, Halifax.
78. J. Catipovic, M. Defenbaugh, L.Freitag, D. Frye. System telekomunikry akustycznego do akwizycji i kontroli danych i kontroli danych. Oceany-89, p. 887-892.
79. F. Caimi, D. Kocak, G. Ritter, M.schalz. Porównanie i rozwój algorytmów kompresji do telemetrii AUV. Ostatnie postępy.
80. P.I. Penin, E.a. Tsellev. W niektórych przybliżeniu stosowane w obliczeniu kanałów komunikacyjnych hydroakustycznych. Daleko Wschodnia kompilacja akustyczna, obj. 1, Vladivostok, 1975, s. 15-18.
81. P.I. Penin, E.a. Tsellev, A.v. Shulgin. Obliczanie energii kanałów komunikacyjnych hydroakustycznego. Daleko Wschodnia kompilacja akustyczna, obj. 1, Vladivostok, 1975, s. 19-23.
82. Svverkin E.i. Telemetria hydroakustyczna w oceanologii. - L. 1978. 149c, Wydawnictwo Lenuniversity.
83. V.P. Kodanev, S.P. Piskarev. Metody optymalizacji charakterystyki systemu przesyłania informacji cyfrowych na kanale hydroakustycznym w warunkach odbioru jednopuszczalnego. Magazyn akustyczny, 1996, objętość 42, №4, str.573-576.
84. Yu.v. ZAKHAROV, V.P. Kodanev. Odporność na hałas adaptacyjnego odbioru złożonych sygnałów akustycznych w obecności refleksji z granic oceanicznych. Magazyn akustyczny, 1996, objętość 42, №2, str.212-219.
85. Yu.v. ZAKHAROV, V.P. Kodanev. Adaptacyjny odbiór sygnałów w kanale komunikacyjnym hydroakustycznym w odniesieniu do magazynu akustycznego Dopplera, 1995, objętość 41, nr 2, str.254-259.
86. Yu.v. ZAKHAROV, V.P. Kodanev. Studia eksperymentalne systemu transmisyjnego informacji o akustycznym z sygnałami podobnymi do hałasu. Magazyn akustyczny, 1994, objętość 40, №5, str.799-808.
87. Volkov A.v., Kuryanov B.F., Denkin M.m. Cyfrowa komunikacja hydroakustyczna dla aplikacji oceanicznych. VII International Potwierdź. Oceanologia, M., 2001, str.182-189.
88. L.r. Leblanc i r.r.j. Beaujean. Spatio-temporaal przetwarzanie spójnych danych komunikacyjnych akustycznych w płytkiej wodzie. IEEE Journal Oceanic Engineering, Vol.25, Nie. 1, 2000, str.40-51.
89. M. Suzuki, K. Nemoto, T. Tsuchiya, T. Nakarishi. Cyfrowa telemetria akustyczna kolorowych informacji wideo. Oceany-89, str.893-896.
90. R. Rowlends. F.kvinn. Ograniczenia prędkości transferu informacji w telemetrii hydroakustycznej. - W CN. Akustyka podwodna, Moskwa, World, 1970, str. 478-495.
91. Grzbiety A.a. Mierniki prędkości statku. Ji, zatrudnienie, 1978, 286c.
92. K.v. Jorgenson, B.L. Grose, F.a. Candal. Doppler Sonar zastosowany do precyzyjnej nawigacji. Ocean-93, VOL.2, str.469-474.
93. Kasatkin B.a., Zlobin H.B., Kasatkin S.B. Analiza charakterystyki środka tworzącym piezo fazowanej anteny opóźnienia Dopplera. W SAT. Technologia morska. Obłon. 1,1996, Vladivostok, Dalnawka, str.74-83.
94. R. Pinkel, M. Merrefield i J. Smith. Ostatni rozwój w technologii Sonaru Dopplera. . Ocean-93, VOL.1, str.282-286.
95. RDI Workhorse Navigator DVL. www.rdinsstruments.com.
96. Demidynka B.m., Zolotarev B.B., Matvienko Yu.v., Plkotsky V.D., Servetnikov M.I. System nawigacji hydroakustycznej. Tez. Fundacja 22 Naukowa i technologia. Konalnevost. Polytech. Inst. Vladivostok, 1974.
97. Demidin V.m., Matvienko Yu.v., Plkotsky V.D., Servertovikov M.i. System nawigacji urządzenia podwodnego "Skat". Tez.donal 1 Union. . Zgodnie z badaniem i rozwojem zasobów oceanicznych na świecie. Władywostok, 1976.
98. Dorokhin K. A. Prezentacja danych systemu nawigacji hydroakustycznej. W SAT. Podwodne roboty i ich systemy. Wydanie 5,1992, Vladivostok, IPMT DVO RAS, str.94-100.
99. Dorokhin K. A. Sprzęt i oprogramowanie bloku statku systemu nawigacji hydroakustycznej. W SAT. Podwodne roboty i ich systemy. Wydanie 5,1992, Vladivostok, IPMT DVO RAS, str. 101-109.
100. Dorokhin K.a. Kontroler systemu nawigacji hydroakustycznej. W SAT. Podwodne roboty i ich systemy. 1990, Vladivostok, IPMT DVO Academy of Science of the ZSRR z. 102108.
101. SALALIN YU.G. Teoretyczne podstawy radaru i nawigacji radiowej. M., Radio i Komunikacja, 1992, p. 134.
102. Matvienko Yu.v. Na dokładności wyszukiwaczy kierunków amplitudy. Ogranicz technologie, Vladivostok, Dalnawka, 2003, wydanie 5, str.56-62.
103. SmartyShev Md, Dobrovolsky Yu.yu. Anteny hydroakustyczne. Katalog.-ji, stocznia, 1984, str. 171.
104. Ya.d. Shirman, V.N. Manjo. Teoria i technika przetwarzania informacji radarowych na tle zakłóceń. M., Radio i Komunikacja, 1981, 416C.
105. J. Bendat, A. Pirsol. Zastosowana analiza danych losowych. Moskwa, Mir, 1989, 542c.
106. Kenneth S. Miller, Marvin M. Rochwarger. Acovarianciance zatwierdzenie do oszacowania momentu spekerskiego. IeEtransactions na teorii informacyjnej, września 1972, str.588-596.
107. Weiqing Zhu, Wen Xu, Jianyun Yu. Ekspulacja błędu estymatora fazy różnicowej korelacji pulsowej tablicy sonarowej. Oceany-96.
108. Zhu Weiqing, Wang Changhong, Pan Feng, Zhu Min, Zhang Xiangjun. Oszacowanie widmowe w ADSP. Oceany-97.
109. Rozwój urządzeń, urządzeń i zasad budowy systemów hydroakustycznych urządzeń podwodnych. - // Raport na temat OKR "MayAn-IPMT" //, naukowy. Ręce. Matvienko Yu.v. Vladivostok, GFC NGO Delstandard, 1992, 190s.
110. Matvienko Yu.v., Rylov R.n., Rylov N.I. Rozwój anteny odbierającej hydrolecy baaptyczny fazowy widoku bocznego. VII Interddes. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych", Moskwa, 2001, s.
111. Rozwój i stworzenie autonomicznego niezamieszkanego urządzenia podwodnego o zwiększonej odległości i autonomii. // naukowy. Ręce. ACEADYJSKI AGEEV MD, P. Artysta Matvienko Yu.v., Vladivostok, IPMT DBO RAS, 2001, Nr State Ros. 01.960.010861.
112. Raporty specjalne OCC "K -1R" // Główny projektant ACEEV Ageev MD, zastępca GL. Konst. Matvienko Yu.v. Vladivostok, IPMT DVO RAS, 1998-2003.
113. G. Korn, T. Corn. Podręcznik matematyki.- Moskwa, nauka, 1970s, 720s.
114. Matvienko Yu.v. Statystyczne przetwarzanie informacji systemu nawigacyjnego hydroakustycznego z podstawą ultra-śruby. W SAT. Technologia morska. Emiss.21998, Vladivostok, Dalnawka, str.70-80.
115. Rylev N.I. W sprawie definicji parametrów nawigacyjnych w UKB HANS zgodnie z anteną wieloetenową. W SAT. Technologie morskie, Vladivostok, Dalnawka, 2003, wydanie 5, str.46-55.
116. A. Steele, S. Byrne, J. Riley, M. Swift. Porównanie wydajności algorytmów oszacowania wysokiej rozdzielczości przy użyciu symulowanych i morza danych testowych. IEEE Journal Oceanic Engineering, Vol.l8, No.4, 1993, str.438-446.
117. P. Kraeuther, J. Bird. Przetwarzanie tablic komponentów składowych do mapowania akustycznego pokosu. Oceany-97.
118. Super-wysokie obwody zintegrowane i nowoczesne przetwarzanie sygnału. Ed. S. Guna, X. Whitehaus. T. Kailat., Moskwa, radio i komunikacja, 1989, 472c.
119. Marple Ml. C.JI. Cyfrowa analiza widmowa i jego zastosowanie. M. Świat., 1990, 584c.
120. A. Steele, C.Byrne. Przetwarzanie tablic o wysokiej rozdzielczości przy użyciu ukrytych technik ważenia EIGENVECTOR. Ieee Dziennik Oceaniczny inżynieria, obj. 15, nie. 1, 1990, str.8-13.
121. R. Roy i T. Kailath. Esprit - oszacowanie parametrów sygnału za pomocą technik niezrośności obrotowych. Transakcje IEEE na akustyce, przetwarzaniu mowy i sygnału, Vol.37, No.7, 1989, str.984-994.
122. Gao Hogze, Xu Xinseg. Badanie metodą wykrywania fazowej systemu bathymetrii swath wiązki. IWAET-99, Harbin, Chiny, 1999, p. 198-203.
123. Kinkulkin I.e., Rubtsov V.D., Fabrik M.a. Metoda fazy do określania współrzędnych. M., 1979. 280s.
124. Matvienko Yu.v., Makarov V.n., Kulinchenko S.i., Rylov R.n., opóźniający szerokopasmowe sygnały nawigacyjne. W SAT. Technologie morskie, Vladivostok, Dalnnock, 2000, rozładowanie, s. 114-120.
125. Matvienko Yu.v., Makarov V.n., Kulinchenko S.i., Nurgaliyev R.F., Rylov R.n., Kasatkin B.a. Opóźnienie systemu nawigacji hydroakustycznej z podstawą ultra-śruby. Patent RF №2179730, Bul. Isoble. Nic .5, 2002
126. V. Douglas i R. Petsch. Optymalne techniki wiązki dla niedoskonałych skalibrowanych tablic. Kontynuowanie oceanu-96,
127. MD. Ageev, A.a. Boreyko, yu.v. Vaulin, B.e. Gornak, B.B. Zolotarev, Yu.v. Matvienko, A.f. Shcherbatyuk uaktualnił podwodną podwodną TSL do pracy na półce i tunelach. - w SAT. Technologie morskie, Vladivostok, Dalnawka, 2000, rozładowanie, str.23-38.
128. Matvienko Yu.v., Makarov V.n., Kulinchenko S.I. W sprawie wyboru struktury i charakterystyki sprzętu kanału komunikacyjnego hydroakustycznego maszyny podwodnej. - Sob. Technologie morskie, Vladivostok, Dalnawka, 1996, wydanie1, str.84-94.
129. Matvienko Yu. V. Oszacowanie głównych parametrów systemu komunikacyjnego hydroakustycznego dla maszyny podwodnej. W SAT. Technologia morska. Etap.4,2001, Vladivostok, Dalnawka, S.53-64.
130. Prognoza badań nad stworzenie jednolitego zakresu zarządzanych urządzeń autonomicznych w celu zwiększenia efektywności systemów oświetleniowych pod wodą, nawigacji, antywyglistej i przeciwdziałania walce
131. Marynarka wojenna. // Zgłoś się na NIR "Centurion-DVO" //, naukowy. Ręce. ACEADYJSKI AGEEV MD, P. Artysta Matvienko Yu.v., Vladivostok, IPMT DVO RAS, 1996
132. Teoretyczne podstawy radaru. Ed. V.E. Diewicz., Moskwa, Radio Radiet, 1978, 608C.
133. Kasatkin B.a., Matvienko Yu.v. Do oceny szerokopasmowej bramki o niskiej częstotliwości cylindrycznych przetwornic piezo. Magazyn akustyczny, 1983, objętość 29, №1, str.60-63.
134. Balabaev S.m., Ivin N.F. Modelowanie komputerowe oscylacji i emisji rozmiarów skończonych. Vladivostok, Dalnaka, 1996, 214 p.
135. Przetwornice piezocemiczne. Katalog ed. Pugacheva s.i. -Leningrad, Shipbuilding, 1984, 256s.
136. Matvienko Yu.v. Opracowywanie i metody badawcze do opisywania i konstruowania cylindrycznych konwerterów Cylindrycznych szerokopasmowych. Abstrakcyjne dis. K.-M.N. Duck Fedez Akademia Nauk ZSRR, 1985, 22c.
137. Matvienko Yu.v., Yermolenko Yu.g., Kirov I.B. Cechy opracowywania anten średnio częstotliwości dla systemów hydroakustycznych urządzeń głębokich wody. Tez. Dokl. Interunion. Conf. , ED, Tovvmu, Vladivostok, 1992, str.78-83.
138. V.A. Kasatkin, ju.g. Larionov, Matvienko Y.V.Development tablicy głębokiej wody dla Subbottom Profiler.- Postępowanie w oceanach-94, Brest-France, 1994.
139. Kasatkin B.a., Matvienko Yu.v. Spektrum własnej częstotliwości Cylindrycznego Piezagreverter. Dziennik akustyczny, 1979, objętość 25, nr 6, str.932-935.
140. Kasatkin B.a. , Yermolenko Yu.g., Matvienko Yu.v. Wielofunkcyjny piezopiatter do badań podwodnych. Sob Roboty podwodne i ich systemy, IPMT DVO RAS, IP.5,1992, p. 133-140. "
141. Ermolenko Yu.g., Kasatkin B.a., Matvienko Yu.v. Emiter hydroaktyczny. Patent Federacji Rosyjskiej №2002381, 1993.
142. Kasatkin B.a., Matvienko Yu.v. Konwerter elektroaktyczny. -. Automatyczny Svid. №1094159, Bul. Isolaar. №19 9984.
143. Matvienko Yu.v, o skutku struktury wewnętrznego napełniania na charakterystyce cylindrycznych środków formujących piezo. W książce: stosowane metody fizyczne w badaniach nieniszczących i kontroli., Khabarowsk, 1981, część 2, p. 125-126.
144. Kasatkin B.a., Matvienko Yu.v. Cylindryczny konwerter piezo z inwersją inwersją w książce: stosowanie nowoczesnych metod fizycznych w badaniach nieniszczących i kontroli., Khabarovsk, 1981, część 2, str.131-132.
145. Kasatkin B.a., Matvienko Yu.v. Pomiar grzejnikowy zakresu dźwięku częstotliwości dźwięku. Wymiary akustyczne. Metody i środki. IV sesja rosyjskiego społeczeństwa akustycznego, Moskwa, 1995, str.4.
146. Kasatkin B.a., Matvienko Yu.v. Cylindryczny przetwornik elektroaktyczny. Automatyczny Svid. №1066665, Bul. Hamulec, №2,1984.
147. Kasatkin B.a., Matvienko Yu.v. Cylindryczny piezopiatter z kontrolowanymi właściwościami. Magazyn akustyczny, 1982, objętość 28, №5, str.648-652.
148. Kasatkin B.a., Matvienko Yu.v. Urządzenie do promieniowania dźwiękowego szerokopasmowego. Automatyczny Svid. №794834, 1982.
149. Analiza i rozwój szerokopasmowych anten hydroaktotycznych opartych na konwerterach piezoceramicznych. // raporty dotyczące "myśliciela -1" NIR "//, naukowy. Ręce. Matvienko Yu.v., Vladivostok, GFC NGO Delstandard, 1983-1985.
150. Rozwój i testowanie specjalnej ścieżki promieniowania sygnału.
151. Raporty na temat składnika NIR "Evolvent -Polos" //, naukowy. Ręce. Matvienko Yu.v., Vladivostok, GFC NGO Dalstandart, 1988-1990.
152. Dochodzenie w zakresie funkcji przenoszenia falowodu akustycznego i anteny.
153. Raporty na temat NIR Aquamarine //, naukowy. Ręce. Kasatkin B.a., P. Artysta Matvienko Yu.v., Vladivostok, GFC NGO Delstandard, 1989. .94c. Brak numeru stanu. 01.890.073426.
154. Kasatkin B.a., Matvienko Yu.v. Charakterystyka impulsów cylindrycznych metod Piezo. Tez. Dokol All-Union Conf. World Ocean, Vladivostok, 1983, p. szesnaście.
155. Rylev N.i. , Matvienko Yu.v., Rylov r.n. Antena recepcji widoku bocznego fazy hydrolecy. Patent Federacji Rosyjskiej № 2209530, 2003
156. R.a. Monzingo, Tu. Młynarz. Adaptacyjne kraty anteny. M., Radio i komunikacja, 1986, 446s.
157. Matvienko Yu.v., Makarov V.n., Kulinchenko S.I. Na metodzie budowy odbiornika gazowego na bardzo małe sob. Badania i rozwój świata Oceanu, 6 wychodzi. Akust. Conf., Vladivostok, 1998, s. 162-163.
158. Matvienko Y.v., Makarov V.n., Kulinchenko S. I. Prosty system komunikacji hydroakustycznej w płytkim morzu dla AUV. Bluzyka stoczniowa i inżynieria oceaniczna, problemy i perspektywy, Vladivostoc, 2001, s. 495-498.
159. Matvienko Yu.v., Makarov B.H., Kulinchenko S.I. Prosty system komunikacji hydroakustycznej w małym morzu dla ACPA do SAT. Problemy i metody rozwoju i działania broni i wyposażenia wojskowego marynarki wojennej, emisji.32, Vladivostok, TOVMI, 2001. C.268-275.
160. K.v. Jorgenson, B.L. Grose, F.a. Candal. H. Allegret. Nowa generacja bieżących profilowania akustycznego. -Oceans-94, VOL.1, str.429-434.
161. B.C. Burdick. Analiza systemów hydroakustycznych. Ji, stocznia, 1988, 358 p.
162. T. Lago, P. Eriksson i M. Asman. Metoda SymMiktos: Roboście i dokładna metoda estymacji do podumienia prądu Dopplera. Oceany-93, VOL.2, str.381-386.
163. T. Lago, P. Eriksson i M. Asman. Oszacowanie krótkotrwałych spektralnych danych dotyczących danych Dopplera Dopplera. Ocean-96.
164. H. Susaki. Szybki algorytm do pomiaru częstotliwości o wysokiej dokładności. Aplikacja do ultradźwiękowego sonaru Dopplera. 0CeAS-2000, p. 116-121.
165. H. Susaki. Szybki algorytm do pomiaru częstotliwości wysokiej wartości. Aplikacja do ultradźwiękowego sonaru Dopplera. Ieee Dziennik Oceaniczny inżynieria, Vol.27, Nie. 1, 2002, str.5-12.
166. Matvienko Yu.v., Kulinchenko S.i., Kuzmin A.B. Quasicogenious Akumulacja krótkich sygnałów impulsowych w celu zwiększenia prędkości opóźnień Dopplera. W SAT. Technologie morskie, Vladivostok, Dalnawka, 1998, Issu.2, str.81-84.
167. Matvienko Yu.v., Makarov V.n., Kulinchenko S.I. , Kuzmin A.v. Odbieranie impulsu o wysokiej precyzji doppleniowej PATENT PATENT FEDERACJI ROSYSKICH №2120131, 1998.
168. Matvienko Yu.v., Kuzmin A.v. Opóźnienie Dopplera Dopplera dla ANPA. - Piąta rosyjska konferencja naukowa i techniczna "Obecny stan i problemy nawigacji i oceanii" (ale-2004, Petersburg).
169. Matvienko Yu.v., Nurgaliev R.F., Rylebov N.I. System śledzenia hydroakustycznego do lokalizacji autonomicznej łodzi podwodnej (ANPA). - Ocean Acoustics, Dokl. 9 shk.-sem. ACAD. Ji.m. Brehov Moskwa, 2002, str.347-350.
170. Matvienko Yu.v., Makarov V.n., nurgaliyev R.F modułu nawigacji i wspierania informacji ANA. Tez. Dokl. , Tovvmu, Vladivostok, 1998.
171. Zolotarev V.v., Casatkin B.a., Kosarev g.v., Kulinchenko S.i., Matvienko Yu.v. Kompleks hydroakustyczny dla autonomicznego urządzenia podwodnego niezamieszkały wodoodporność. Sob Pracownik X Session Rao, Moskwa, 2000 S.59-62.
172. Ageev MD, Kasatkin B.a., Matvienko Yu.v., Rylov R.n., Rylov N.I. Hydroakustyczne sposoby nawigacji podwodnego robota. VIII Interddes. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych", Moskwa, 2003, część 2, str.40-41.
173. Ageev MD, Vaulin Yu.v., Kiselev Ji.B., Matvienko Yu.v., Rylebov N.i., Shcherbatyuk A.F. Systemy podwodnej nawigacji dla ANA. -Viii interfejsu. Szkoła naukowa. . "Nowoczesne metody i środki badań oceanicznych", Moskwa, 2003, część 2, s. 13-22.
Uwaga: teksty naukowe przedstawione powyżej są publikowane do zapoznania się i uzyskane przez rozpoznanie oryginalnych tekstów tezu (OCR). W związku z tym mogą zawierać błędy związane z niedoskonałością algorytmów rozpoznawania. W PDF rozprawy i abstrakty autora, które dostarczamy takie błędy.


